
星上软件对地面站坐标短时间预报算法及精度评估
2016-02-21 06:55蒋虎邓雷
全球定位系统 2016年6期
蒋虎,邓雷
(1.上海微小卫星工程中心,上海 201203;2.中国科学院微小卫星创新研究院,上海 201203;3.中科院上海高等研究院,上海 201203)
星上软件对地面站坐标短时间预报算法及精度评估
蒋虎1,2,3,邓雷1,2,3
(1.上海微小卫星工程中心,上海 201203;2.中国科学院微小卫星创新研究院,上海 201203;3.中科院上海高等研究院,上海 201203)
为了实现星上自主对地面站姿态指向,通过软件实现了GNSS接收机输出地面站J2000坐标的功能,文中给出了星上实现地面站坐标预报算法。数据分析结果表明,短时间预报后所得到的地面站位置精度可以满足姿控分系统对地面站坐标精度的应用需求。
地面站;预报算法;精度评估
0 引 言
在卫星对地面站精确指向过程中,卫星星务计算机需要获取J2000坐标系下卫星的位置信息和地面站的位置信息[1-3]。GNSS接收机给出的J2000坐标系下地面站坐标所对应的时间都是整秒,而且给出的坐标都是相对当前时刻滞后1 s时间的。然而,星上姿控需要地面站的坐标数据的时间间隔是0.5 s,为了满足姿控系统对地面站坐标数据的需求,星务软件必须对GNSS给出的地面站坐标进行预报处理。这里根据该需求给出了坐标预报的算法,并对预报精度给出评估结果。
1 预报算法及精度评估
假定GNSS接收机给出的地面站坐标的2个相邻序列点A、B,序列点坐标分别为A(ta,xa,ya,za),B(tb,xb,yb,zb),利用线性模型进行预报后,可以得到预报点C的坐标(t,x,y,z)。
根据A、B两点坐标,对C点进行线性预报的规律,可以得到预报点c(t,x,y,z)的算法为
x-xb=[(xb-xa)/(tb-ta)]×(t-tb),
y-yb=[(yb-ya)/(tb-ta)]×(t-tb),
z-zb=[(zb-za)/(tb-ta)]×(t-tb,)
t=tb+delta(t),
(1)
其中,delta(t)为预报时间长度。
若序列点A,B相邻间隔1 s(GNSS接收机给出的位置时间间隔就是1 s),即tb-ta=1.
那么存在下列预报规律:
1) 预报0.5 s的算法为
x=3/2×xb-1/2×xa,
y=3/2×yb-1/2×ya,
z=3/2×zb-1/2×za,
t=tb+0.5 s.
(2)
2) 预报1 s的算法如下:
x=2×xb-xa,
y=2×yb-ya,
z=2×zb-za,
t=tb+1 s.
(3)
3) 对于其他预报时间间隔情况下,预报通用公式为
(已经利用tb-ta=1的约束条件):
x-xb=(xb-xa)×(t-tb),
y-yb=(yb-ya)×(t-tb),
z-zb=(zb-za)×(t-tb),
t=tb+delta(t),
(4)
其中,delta(t)为预报时间长度。
利用以上预报算法可以得到地面站位置预报值,这与GNSS正样单机生成的测试数据比较后,得到因预报算法引入的地面站坐标误差情况如图1~图5和表1所示。
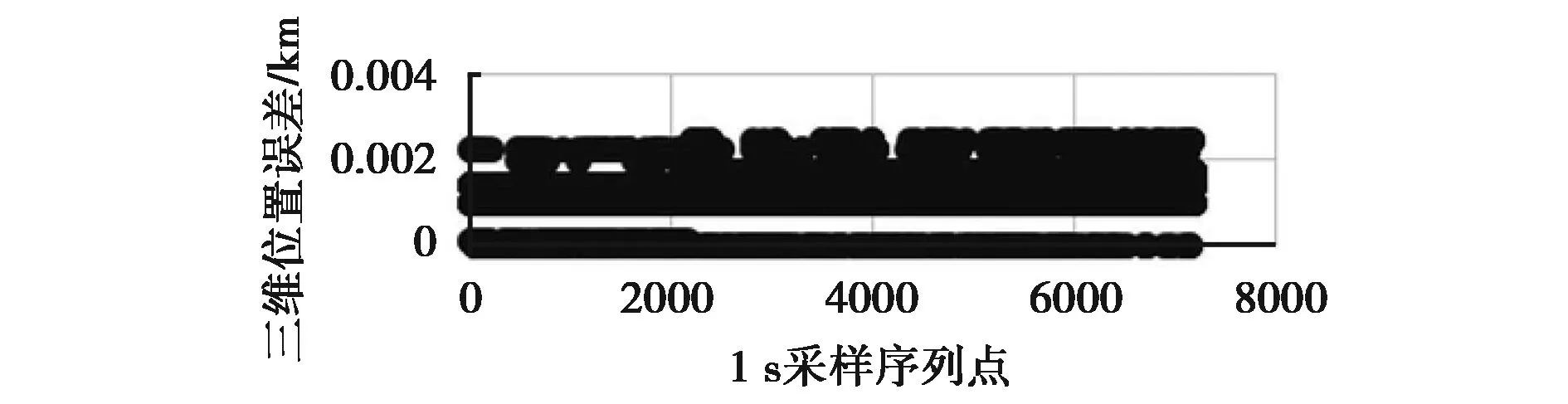
图1 基于GNSS接收机定位给出的地面站数据,1 s时间线性预报地面站位置引入的算法误差
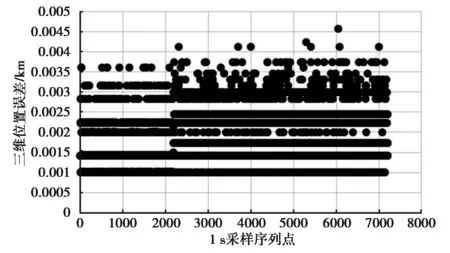
图2 基于GNSS接收机定位给出的地面站数据,2 s时间线性预报地面站位置引入的算法误差
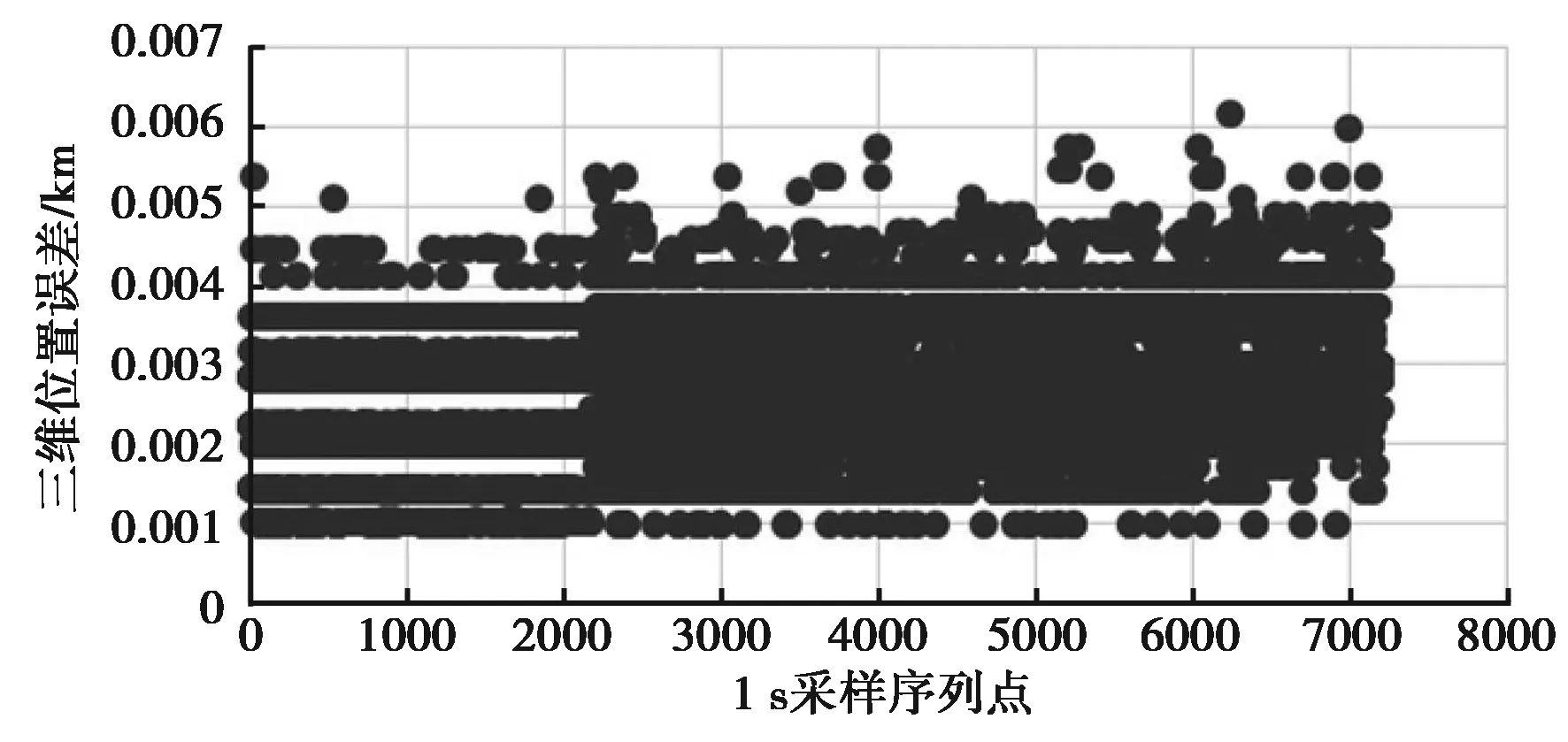
图3 基于GNSS接收机定位给出的地面站数据,3 s时间线性预报地面站位置引入的算法误差

图4 基于GNSS接收机定位给出的地面站数据,4 s时间线性预报地面站位置引入的算法误差

图5 基于GNSS接收机定位给出的地面站数据,5 s时间线性预报地面站位置引入的算法误差
2015年某型号卫星正样轨道确认测试期间,对地面站坐标进行了比较分析,得到的结果是:GNSS给出的J2000地面站坐标与STK给出地面站坐标差异在50m左右。可见,即使考虑了星上软件对地面站坐标进行不大于5s的短时间外推而引入的误差,星上软件可以提供约60m左右精度的地面站坐标。这可以满足卫星姿控系统对地面站坐标精度的需求[1-3]。
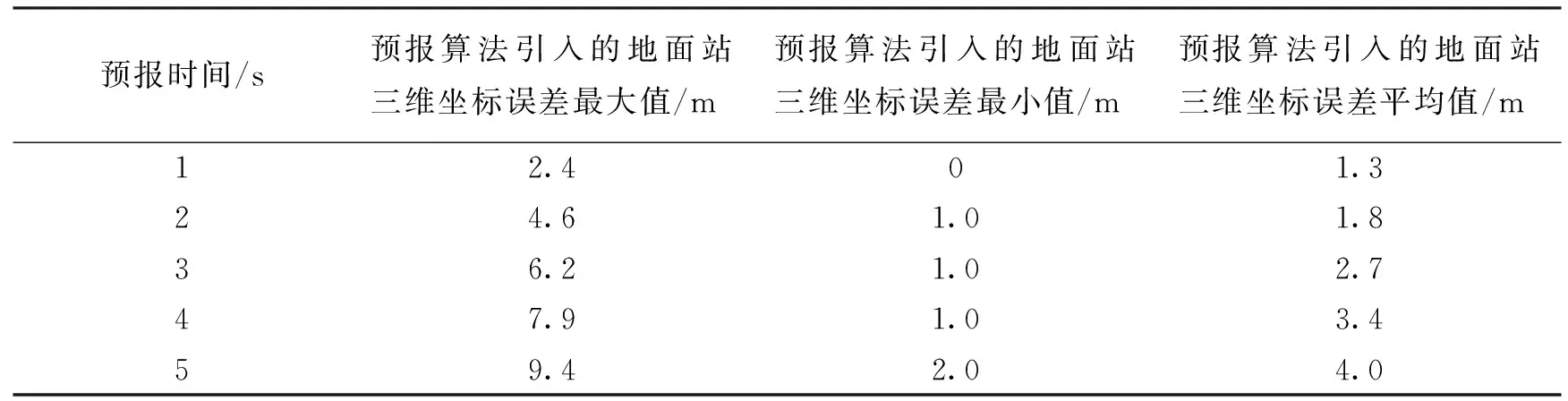
表1 线性预报模型下,地面站位置因预报算法引入的误差
2 结束语
GNSS接收机给出地面站J2000坐标后,某型号卫星星上地面站短时间预报将采用以上算法进行数据处理。以上数据分析结果表明,短时间预报后所得到的地面站位置精度可以满足姿控分系统对地面站坐标精度的应用需求。
[1] 梁延鹏,星地光通信ATP对准特性仿真研究[D].合肥:中国科技大学,2014:25-27.
[2] 亓波.量子通信光学地面站ATP关键技术研究[D].北京:中国科学院研究生院(光电技术研究所),2014.
[3] 李晓峰,星地激光通信链路原理与技术[M].北京:国防工业出版社,2007.
Space-Borne Software Algorithm for Short Interval Prediction of Site Coordinates and its Precision Assessment
JIANG Hu1,2,3,DENG Lei1,2,3
(1.ShanghaiEngineeringCenterforMicrosatellites,Shanghai201203,China;2.MicrosatellitesInnovationInstitute,ChineseAcademyofSciences,Shanghai201203,China;3.ShanghaiAdvancedResearchInstitute,ChineseAcademyofSciences,Shanghai201203,China)
In order to realize autonomous attitude pointing of a spacecraft to a ground site, software has been designed to enable GNSS receiver to output the coordinates of S/C in J2000 reference system. The space-borne software algorithm is presented to predict the site coordinate. Simulation data analysis has shown that Space-borne software algorithm for short interval prediction of site coordinates can satisfy the requirements of attitude control subsystem of S/C in order to carry out precise site pointing.
Ground sites; prediction algorithm; precision assessment
2016-10-20
10.13442/j.gnss.1008-9268.2016.06.004
P228.4
1008-9268(2016)06-0017-03
蒋虎(1969-),男,博士,研究员,现主要研究领域为卫星总体技术,卫星轨道分析与设计。
邓雷(1976-),男,博士,副研究员,现主要研究领域为卫星总体技术,载荷系统设计。
联系人:蒋虎E-mail:hh9999ca@163.com
猜你喜欢
导航定位学报(2022年1期)2022-02-17
一重技术(2021年5期)2022-01-18
中等数学(2021年9期)2021-11-22
中学生数理化·高一版(2021年2期)2021-03-19
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
电子制作(2018年11期)2018-08-04
卷宗(2018年14期)2018-06-29
电子制作(2016年1期)2016-11-07
