
基于旋转分度模式的多组分注塑机转盘设计
2016-02-20 06:06刘宏许成琳李博怀
自动化与信息工程 2016年6期
刘宏 许成琳 李博怀
基于旋转分度模式的多组分注塑机转盘设计
刘宏 许成琳 李博怀
(东华机械有限公司)
多组分注塑机的难点在于多工位转盘的流道设计、工位模式识别和运动控制。本文采用旋转分度模式,结合多个距离传感器融合工位信息,设计多物料注塑的多工位转盘机构,设计分别对应二、三、四组分注塑加工的180°、120°和90°旋转分度模式一体化的转盘。试验结果表明:该转盘机构具备启停平稳、旋转快速、角度到位精准、重复性高、节能降耗、生产效率高的特点。
注塑机;多工位转盘;旋转分度
0 前言
当前,常见的多物料注塑机转盘机构一般使用液压马达驱动旋转,不仅能量损失多,响应速度慢,且控制精度和生产效率低[1]。一般的转盘机构通常只有2个旋转工位[2-4],适用2种物料组分的塑料制品生产,难以满足近年来用户市场逐步提高的3种、4种乃至更多材料种类的塑料制品生产的需求[4]。多物料注塑机的难点在于多工位转盘的流道设计、工位模式识别和运动控制[5]。采用旋转分度模式、结合多个距离传感器融合工位信息,可实现工位分度模式的转盘设计。
1 转盘旋转分度模式机理
多物料注塑机转盘通过旋转改变内部流道,实现不同种类物料进入模具内成型[6]。采用旋转分度的机理,在转盘的圆周边缘设置检测凹孔,并设置多个距离传感器配合,实现工位信息检测。
2~4工位转盘及其关键结构设计图如图1所示。将转盘分为2层,在后层203中设置4个检测凹孔212、214、215、217,与1个距离感应传感器9C(见图2)配合作用,实现物料盘的2、3工位分度模式;在首层204中设置检测凹孔210、211、213、216,与2个距离感应传感器9A、9B(见图2)配合作用,实现工位信号检测,其检测配合作用互不干扰。

图1 2~4工位转盘及其关键结构设计图
多工位转盘机构3D模型如图2所示,在插销15处,设置感应开关M和N,分别用于检测插销的退回和伸出。当插销退回时,转盘被开锁,可旋转;当插销伸出插入到插槽8(E,F,G,H)的内斜面中,转盘被上锁止动,不可旋转。在转盘圆周边缘设置呈特定角度分布感应开关9(A,B,C),其检测信号经逻辑组合,用于回馈判断相应的转盘角度位置。当开关9(A,B,C)感应到金属物质时,获得数字感应信号1;当开关9对准凹孔(即感应不到金属物质)时,获得数字信号0。
多工位转盘机构信号-状态表如表1所示,可以看出,在0(360º)、120º、180º、240º的特定角度位置,开关(A,B,C)的信号组合是唯一、不重复的。对其余非特定角度出现的重复信号组合,控制电脑的程序设定将其视作杂质信号过滤掉,不对特定角度的回馈判定产生影响。

图2 多工位转盘机构3D模型
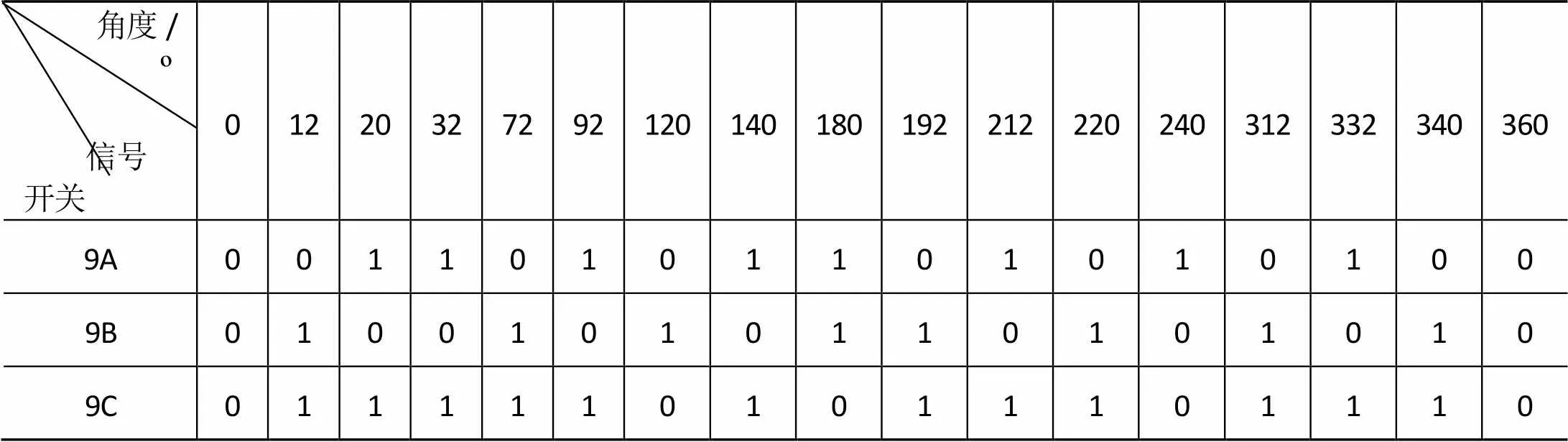
表1 多工位转盘机构信号-状态表
本机构设计了2种分度模式,二工位180º旋转分度模式,即0º→180º→0º旋转分度的动作循环;三工位120º旋转分度模式,即0º→120º→240º→0º旋转分度的动作循环,有0º、120º、180º、240º4个工作位。
2 试验
按表1信号-状态表,选择以0°→120°→240°→360°作为一个循环3分度,设计3工位转盘机构。多工位转盘机构实物图如图3所示。下面以本转盘机构左转完成0°→120°基础旋转分度动作为例,具体说明转盘机构的动作控制模式。

图3 多工位转盘机构实物图
伺服驱动器接收来自控制电脑的目标指令,通过模块程序转换,输出PID控制模拟量给伺服电机,使其作启动、加速、稳速、减速、停止的旋转动作,同时伺服电机的编码器脉冲信号回馈到控制电脑,用于判定电机在旋转过程中所处的角位置,由此组成闭环控制系统,表现出如图4所示的具备斜升斜降在速度拐点处平滑变速的运行曲线,对应于整个转盘机构,即表现出在启停、加减速时平稳变速、无冲击。

图4 转盘运行曲线
3 结语
本转盘机构采用伺服驱动技术,响应快速、控制精准;设置上锁止动装置,保护机构的安全,提高使用寿命;设计2种旋转分度模式,根据模具设计的模式和注塑生产的工艺等条件因素,按需选用,为客户提供多工位多模式的使用选择;将转盘的4个定位插槽设置为90º均匀分布,又可得到一种新的多工位转盘机构;当客户模具与注塑工艺配合设计时,该转盘还可实现4工位分度模式。该机构提供一种伺服动力多工位转盘旋转分度结构和控制方案,具有启停平稳、旋转快速、角度到位精准、重复性高、节能降耗、生产效率高等特点。
[1] 章锦雷,何挺.双色注塑机转盘控制方法分析和研究[J].橡塑技术与装备,2015,41(8):29-32.
[2] 王珏,袁卫明,黄庆达,等.高效节能双组份注塑系统及设备开发[J].轻工机械,2014,32(3):1-5,12.
[3] 范有发,肖雪清.控制开关面板双色注射模设计[J].工程塑料应用,2012,40(1):51-54.
[4] 南瑞亭.LCD后背板的注射成型参数正交优化设计[J].自动化与信息工程,2011,32(2):43-44,48.
[5] 赵浩杰,郑良.转盘式多组分注塑机转盘侧倾问题及优化措施探讨[J].冶金丛刊,2016(4):95+98.
[6] 张春鹏,王锡明,张远斌,等.基于CAE技术的转盘架注塑模具优化设计[J].赤峰学院学报(自然科学版),2016,32(9): 32-34.
An Indexing Rotary Mode Based on Multi-Component Rotary Table for Injection Molding Machine Design
Liu Hong Xu Chenglin Li Bohuai
(Donghua Machinery Co., Ltd.)
The difficulty of multi-component injection molding machine lies in the design of multi-station rotary table, station pattern recognition, and motion control. An indexing rotary mode was propose to design multi-stationrotary mechanism for multi-material injection molding, combined with multiple distance sensor fusion workstation information. The rotary table with 180 DEG, 120 DEG and 90 DEG rotary indexing mode corresponding to the injection molding of 2, 3, or 4 components is designed. The results shows, the turntable mechanism has the characteristics of smooth start and stop, fast rotation, accurate angle, high repeatability, energy saving and high efficiency.
Injection Molding Machine; Multi-Component Rotary Table; Indexing Rotary
刘宏,男,1983年生,本科,工程师,主要从事注塑机设计工作。
许成琳,男,1981年生,本科,主要从事注塑机设计工作。
李博怀,男,1983年生,本科,主要从事注塑机设计工作。
猜你喜欢
汽车工艺师(2021年7期)2021-07-30
装备制造技术(2020年3期)2020-12-25
物流技术与应用(2020年5期)2020-06-25
意林(2020年10期)2020-06-01
制造技术与机床(2019年6期)2019-06-25
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2017年10期)2017-11-28
制造技术与机床(2017年8期)2017-11-27
杭州(2015年9期)2015-12-21
中国塑料(2015年3期)2015-11-27
