
基于SURF算法的胶囊内镜冗余图像快速筛除
2016-02-16 06:19刘小燕龚军辉李向东武伟宁彭同胜
中国生物医学工程学报 2016年3期
刘小燕 龚军辉 李向东 武伟宁 彭同胜
1(湖南大学电气与信息工程学院,长沙 410082)2(向东智造医疗科技有限公司,江苏 苏州 215000)3(湖南工程学院电气信息学院,湖南 湘潭 411101)
基于SURF算法的胶囊内镜冗余图像快速筛除
刘小燕1*龚军辉1,3李向东2武伟宁1彭同胜1
1(湖南大学电气与信息工程学院,长沙 410082)2(向东智造医疗科技有限公司,江苏 苏州 215000)3(湖南工程学院电气信息学院,湖南 湘潭 411101)
胶囊内镜在检查消化道全程中会产生数万帧有大量冗余的图像数据,要从中找出有病灶的图像,医生需要耗费大量的时间和精力逐帧仔细查看。因此,研究冗余图像的自动筛除对提高医生的诊疗效率具有重要意义。但由于胶囊内镜图像场景复杂多变,且存在气泡、蠕动等不确定因素,冗余图像的自动筛除仍是一个难题。采用SURF算法,提取胶囊内镜图像的特征点及特征描述向量;将向量夹角作为两帧连续图像特征点之间的匹配度量,采用最大类间方差法实现对特征点对的自适应识别;最后以匹配特征点数和分块匹配度为指标,计算图像之间的相似度,筛除冗余图像。对采集的128段胶囊内镜视频段进行冗余图像筛除实验。结果表明,该方法能以平均0.06 s/帧的速度快速完成冗余图像的自动筛除,其召回率(recall)、准确率(precision)和F-measure等3个性能指标分别达到了81%、90%和85%,且该方法对消化道存在的蠕动、气泡及光照变化等不确定因素具有较强的鲁棒性,具有良好的性能。
胶囊内镜;快建鲁棒特征(SURF);特征匹配;冗余图像
引言
胶囊内镜 (capsule endoscopy,CE)是对人体消化道疾病进行检测和诊断的先进方法之一,与传统的插入式消化道内镜相比,CE具有无创伤、安全、可全程检测等优越性能[1-3]。胶囊内镜长度约20 mm,直径约10 mm,其内部结构如文献[4-5]中插图所示(见图1(a)),主要由CMOS图像传感器、镜头、LEDs、ASIC发射器及电源等模块构成。胶囊内镜工作原理如图1(b)所示,患者吞服胶囊内镜后,借助重力和胃肠道的自然蠕动,内镜向前运动,依次经过口腔、食道、胃、十二指肠、空肠、回肠、结肠等部位,最后由肛门自然排出体外。在此过程中,胶囊内镜对所经过的消化道进行全程摄像(2~3帧/s),并通过无线传输方式将图像保存在患者体外携带的数据记录仪中。据统计,胶囊内镜在消化道内的平均停留时间约8 h,全程可采集几万帧至十几万帧的彩色图像[2, 6]。由于胃肠的蠕动特点,所采集的图像中往往存在大量相似度极高的冗余图像,医生从这些海量图像中人工筛选出有病灶的图像,通常需要2~3 h集中精力逐帧仔细查看筛选,劳动强度大且效率不高[6-7]。因此,如何实现胶囊内镜冗余图像的快速自动筛除以提高医生诊断效率,是计算机辅助诊断技术及医学图像处理研究领域的一个热点问题[8]。

图1 胶囊内镜内部结构和工作原理[4-5]。(a) 内部结构;(b)工作原理Fig.1 Internal structure and principle of capsule endoscopy[4-5]. (a) Internal structure; (b) Working principle
然而,胶囊内镜冗余图像的自动筛除目前仍属于有待解决的难点问题,这是因为内镜经过了胃、十二指肠、结肠等不同消化道部位,所采集到的图像场景复杂多变,在结构、颜色、纹理等方面存在较大差异,且可能出现食物残渣、气泡、消化液、血液等诸多不确定因素(见图2),增加了筛除冗余图像的处理与分析难度。

图2 CE图像中的复杂场景示例Fig.2 Examples of complex scenes in CE images
近年来,国内外已有学者提出了一些胶囊内镜冗余图像筛除方法(见表1)。Iakovidis等采用模糊C均值对图像进行聚类,再用非负矩阵分解提取具有代表意义的CE视频关键帧[7]。Li等采用自适应十字模式搜索的块匹配(adaptive rood pattern search block matching,ARPS)及贝叶斯多尺度微分光流方法来检测图像在时域内是否存在有较大的场景位移,并利用场景位移作为相似度来筛除冗余图像[9]。Karargyris 等基于图像模糊区域分割,采用全局图策略在相邻的图像之间进行配准,通过计算分割区域相似度来评估冗余数据[10]。Lee等利用光流法和特征检测对蠕动进行前向和后向的运动分析检测和筛除冗余图像[4]。刘洪、潘宁等基于BAME-SIFTFlow算法来筛除冗余图像[6, 11],即采用蜂群算法估计胶囊内镜的刚性运动参数(bee algorithm on motion estimation,BAME),采用SIFTFlow算法[12]评估消化道的非刚性运动,用场景位移作为相似度来筛除冗余图像。这些算法为解决胶囊内镜图像冗余问题提供了可行的方法,但是,目前能达到的处理速度约为0.5 s/帧[4, 7],对于具有数万帧的胶囊内镜视频图像,计算机处理时间将高达十几小时,因此需研究一种更为高效的冗余图像筛除算法。
表1 胶囊内镜冗余图像自动筛除相关研究
Tab.1 Literature reports on redundancy reduction in CE video

方法目的聚焦的消化道区域实验数据量/帧图像分割+GlobalGraph[10]筛除冗余帧未明确说明2250模糊C均值+NMF[7]关键帧提取消化道全程约14000APRS+光流法[9]筛除冗余帧未明确说明约2000光流法+特征检测[4]筛除冗余帧小肠 约30000BAME-SIFTFlow[6]筛除冗余帧消化道全程500
快速鲁棒特征(speeded up robust features,SURF) 算法是一种高效稳定的图像匹配算法[13]。该算法能快速地提取图像的特征点及其特征描述向量,且对图像的尺度变换、光照、平移具有较强的鲁棒性,在医学、遥感图像处理等领域有很多成功的应用[14-15]。本研究根据胶囊内镜图像场景复杂多变、不确定因素众多等特点,采用SURF算法提取胶囊内镜图像的特征点,并根据两图像之间匹配的特征点数量及分布特性来评估图像之间的相似度,以达到快速有效筛除冗余图像的目的。
1 材料与方法
1.1 SURF算法原理
Bay等于2006年在经典的尺度不变特征变换(scale invariant feature transform,SIFT)[16-17]的基础上,为提高计算效率,提出了SURF算法[13]。SURF算法主要利用了Hessian矩阵和非极大值抑制的方法精确定位特征点,并采用Harr小波提取特征点的主方向及特征描述向量,下面对其基本原理进行简要说明。
设有一幅二维原始图像I(x,y),其尺度为σ的Hessian矩阵H(x, y,σ)[18]定义为
(1)
式中,Lxx(x, y, σ)、Lxy(x, y, σ)、Lyy(x, y, σ) 为原始图像与二维高斯函数G(x, y, σ)的二阶偏导的卷积,有
(2)
(3)
(4)
Hessian矩阵的行列式具有较准确的位置和尺度的定位特性[19],为了简化该行列式的计算,Bay等用一连续区域块内权值相同的盒子滤波器来近似二维高斯函数的二阶导数[13],如图3所示。

图3 离散高斯函数二阶导数的近似(上为高斯函数的二阶导数;下为盒子滤波器)。(a) x方向;(b) xy方向;(c) y方向Fig.3 Approximation of discrete second-order Gaussian derivative (top row: the discrete second-order Gaussian derivatives; bottom row: box filter). (a) x direction; (b)xy direction; (c)y direction
盒子滤波器与块图像IB(x, y)的卷积Dxx为
(5)
式中,αk为盒子滤波器中第k块的权值,B为盒子滤波器对应的块区域。由此,可将Hessian矩阵的Lxx(x,y,σ)、Lxy(x,y,σ)、Lyy(x,y,σ)用相应尺度的Dxx、Dxy、Dyy代替,并近似计算Hessian矩阵的行列式det(Happorx)[13],有
(6)
式中,Hessian矩阵行列式表示图像在(x, y)点在尺度σ处的响应值,遍历所有像素便形成了这一尺度上检测的响应图像。
保持图像大小不变,不断增大盒子滤波器尺度,计算出各尺度上检测的响应图像,便构成了SURF算法的多尺度空间,在此基础上,采用三维非极大值抑制方法实现特征点的精确定位[20]。
为使检测到的特征点的特征描述具有旋转不变性,SURF算法在以特征点为圆心、半径为6σ 的圆形邻域内,计算在x轴方向与y轴方向的Haar小波响应。取特征点为圆心、角度为π/3扇形窗口以一定间隔旋转,遍历整个圆形邻域计算该扇形窗口在x轴与y轴方向小波响应的矢量和,取矢量最长的方向为该特征点的主方向。确定特征点主方向后,以特征点为中心,选取一个区域大小为20σ带主方向的方形区域(见图4),将其分成4×4个5σ×5σ的子区域,分别计算每个子区域的Haar小波在相对于主方向的水平和垂直方向的响应值dx、dy。最后统计每个子区域的响应值∑dx、∑dy、∑|dx|、∑|dy|,得到每个子区域的描述为

(7)
因此,每个特征点可用一个64维的特征描述向量来描述,这个特征描述向量表示了特征点及其邻域像素点的特征,具有尺度变化、旋转等不变特性。

图4 特征点描述Fig.4 Feature points description
1.2 基于SURF算法的胶囊内镜冗余图像筛除
1.2.1 胶囊内镜冗余图像筛除流程
基于以上所述的SURF算法,本研究提出了一种胶囊内镜冗余图像的快速筛除方法(见图5),其主要处理过程如下:读取CE视频中两帧连续图像,分别作为模板帧和待评估帧;将彩色图像转化为灰度图像以减少计算量;采用SURF算法分别提取模板帧及待评估帧图像的特征点及特征描述向量;对两帧图像的特征点进行匹配,根据匹配的特征点分块计算模板帧与待评估帧的相似度,最后根据相似度来判断待评估帧是否为冗余帧。
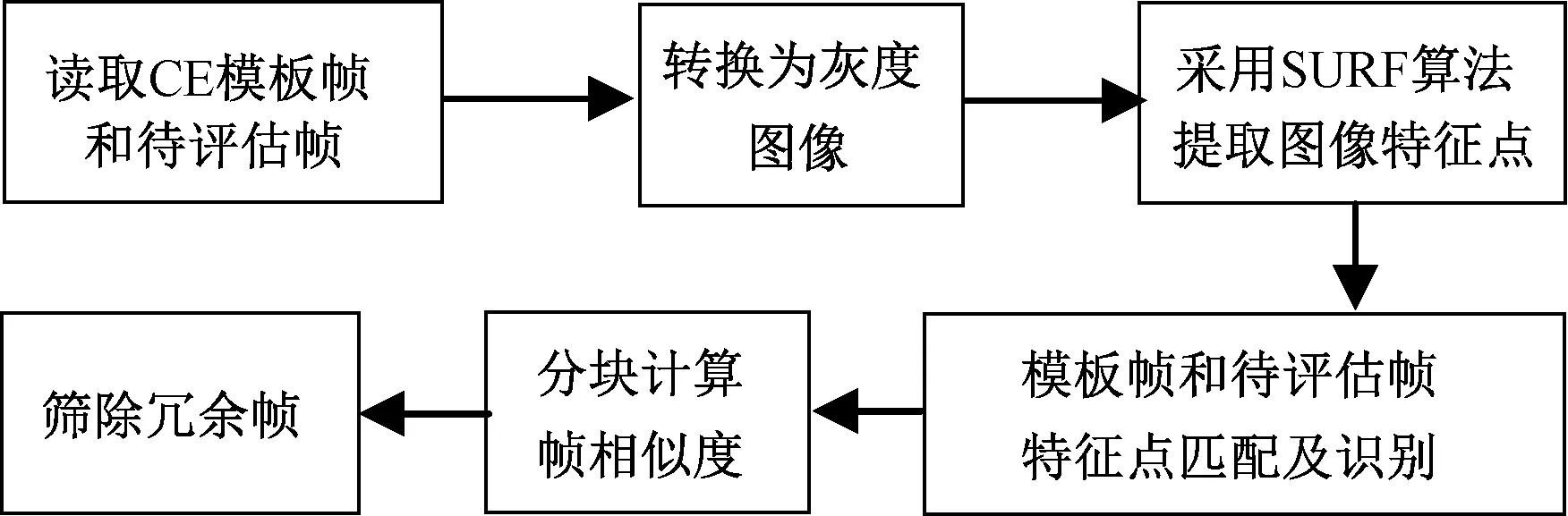
图5 基于SURF算法的胶囊内镜冗余图像筛除处理过程Fig.5 The framework of CE video redundancy reduction
1.2.2 胶囊内镜图像特征点定位和提取
所处理的胶囊内镜彩色图像原始尺寸为240像素×240像素,为提高处理速度,将彩色图像转换为灰度图像,如图6(a)~(b)所示。采用SURF算法检测出该灰度图像的特征点如图6(c)所示,图中白色圆圈圆心为定位后的特征点的坐标,圆圈半径表示检测到的特征点的尺度。

图6 检测到的图像特征点及其尺度(上为模版帧;下为待评估帧)。(a)原始的CE彩色图像; (b)转换的CE灰度图像; (c)检测到的CE图像特征点Fig.6 Example of the detected feature points and related scales(The top row: template frame; The bottom row: candidate frame). (a)Original color CE image; (b)Gray CE image after conversion; (c)Detected feature points in CE image
1.2.3 胶囊内镜图像特征点匹配及相似度计算
设SURF算法在模板帧上检测到m个特征点,其中第i个特征点的64维特征描述向量表示为ti=(ti1,ti2,…,ti64);在待评估帧上检测到n个特征点,其中第j个特征点的64维特征描述向量表示为ej=(ej1,ej2,…ej64)。为寻找模板帧和待评估帧上最匹配的特征点,向量夹角被作为两帧图像特征点之间的匹配度量,向量夹角越小,表示待评估帧与模板帧的特征点对匹配度越高。待评估帧的特征点j与模板帧的特征点i之间的向量夹角cij计算式为
(8)
由此,可获得待评估帧上的特征点j与模板帧中所有m个特征点匹配度的集合,记为(c1j,c2j,…,cmj)。遍历待评估帧中每个特征点,可得到待评估帧中每个特征点的最小向量夹角集Cmin,有
(9)
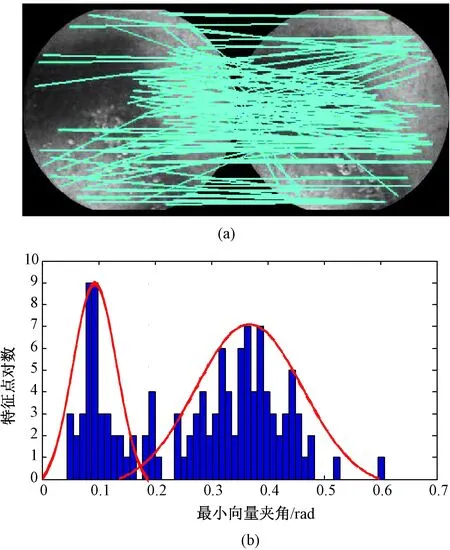
图7 最小向量夹角的特征点对及对应直方图。(a) 最小向量的夹角特征点对; (b)直方图Fig.7 Feature pairs and histogram of minimal vector angular. (a) Feature pairs of minimal vector angular; (b) Histogram
根据式(9),可得到图6中待评估帧与模板帧的最小向量夹角的特征点对,如图7(a)所示。从图中可以看出,由于内镜图像场景的复杂性,有些特征点对并不匹配(误配),因此还需要进一步识别,以提高可靠性。图7(b)给出了最小向量夹角值的直方图,可以看出,该直方图在0.34和0.08处呈现明显的双峰特征,且对于误配的特征点,其最小向量夹角值基本聚集在0.34附近。对于这种双峰直方图,可以借鉴图像分割中的最大类间方差法来实现匹配特征点的自适应识别。最大类间方差法是一种基于概率统计学的自适应阈值分割算法[21],在图像处理中得到广泛运用,其基本原理是将图像中的每一个灰度值作为可能的阈值,按灰度级将图像分为前景和背景两类,依次计算每一次分类后的类间方差,选取类间方差最大时的灰度级作为最佳阈值。基于这一算法,首先选取一分割阈值,将最小向量夹角值的特征点对分为匹配特征点对及误配特征点对两类。假设这两类特征点对所占的比例分别记为w、1-w,其向量夹角的均值分别为u0、u1,则Cmin中所有特征点对的向量夹角均值u可表示为
u=wu0+(1-w)u1
(10)
为使两类特征点对的类间方差最大,建立目标函数J为
(11)
取目标函数最大时的阈值为最佳分割阈值。若集合Cmin中向量夹角值小于最佳分割阈值,则识别为匹配特征点对,否则识别为误配特征点对。
正确识别匹配特征点对之后,需计算模板帧与待评估帧的相似度。一种较直接的方法就是以两帧图像中匹配特征点的总数n1作为相似度(在本研究实验中,n1在0~200范围之间)。一般n1越大,表示待评估帧与模板帧越相似。但是,在某些情况下,匹配特征点在图像中的分布并不均匀,有可能只集中在图像的小块区域内,这种情况下就会造成误判,因此需要一种合适的相似度判别方法。笔者根据胶囊内镜图像匹配特征点的分布特性,将图像等分为6个扇形子块(见图8),分别考察每个扇形子块的匹配特征点数,若该子块内存在匹配特征点,则认为该子块为匹配扇形子块。一般匹配扇形子块数(记为n2)越多,说明待评估帧与模板帧在总体上更为相似。综合考虑匹配扇形子块数及匹配特征点数,引入相似度计算,有
(12)
式中,λ表示匹配特征点总数在相似度判断中的权重。
当相似度大于设定的阈值Sc时,则将待评估帧判断为冗余图像。对于不同尺寸的图像,其λ及S的取值有所差别。对于240像素×240像素的胶囊内镜图像,一般取λ=0.1~0.3,Sc=1~2比较合适。

图8 相似度计算示例(n1=23, n2=6, λ=0.2, S=5.6)Fig.8 Example of similarity calculation
1.2.4 算法的性能评估
目前,冗余图像筛除算法的性能常采用召回率(recall)与准确率(precision)两个量化指标[6,10,22]来评估,recall与precision指标可表示为
(13)
(14)
一般来说,准确率和召回率越高越好,但在某些情况下,这两者相互制约的[23]。因此,本研究在precision和recall两个指标的基础上,增加了F-measure指标对算法的性能进行评估。F-measure定义[23]如下:
(15)
F-measure值越高,表示算法的综合性能越好。
为了评估所提出算法的准确率等性能,首先由3名审查者对随机抽取的视频段进行冗余帧的人工筛除。之后,将人工筛除结果与本算法的筛除结果应用式(13)~(15)进行计算,以检验算法的准确率等性能。
2 结果
对来自同一胶囊内镜采集的128段视频(共计25 375帧240像素×240像素的彩色图像)进行了冗余图像计算机自动筛除实验(计算机主频3.3GHzCPU、4GB内存、华硕H61M-E主板、Matlab2013软件平台)。实验中,首先将胶囊内镜视频第1帧被读入作为模板帧,第2帧作为待评估帧,应用基于SURF算法的胶囊内镜的快速筛除方法,计算两帧图像的相似度S(取λ=0.2,Sc=1.6)。若S>Sc,则筛除该待评估帧,并读入下一帧图像作为待评估帧;若S≤Sc,则将该待评估帧作为模板帧。重复上述过程直到视频结束,共从25 375帧胶囊内镜原始图像中筛查出了10 902帧冗余图像,数据缩减达43%,处理速度高达0.06s/帧。
图9给出了不同消化道部位、在不同复杂场景下连续图像的冗余筛除结果示例,示例中展示了典型的冗余图像及存在蠕动、气泡变化、光照变化等复杂多变的冗余图像。所筛除的冗余帧少则几帧,多则上百帧,基于篇幅只展示了连续的两帧;表中的S值是对应的图像帧与模板帧的相似度,根据计算结果,取相似度S>1.6的待评估帧判断为冗余帧,判断结果与人工观察结论大致相同。从图9可以看出,本研究所提出的方法不仅能有效筛除如场景(a)的典型冗余图像,对如场景(b)中有消化道蠕动、如场景(c)中有气泡变化、如场景(d)中有光照变化等复杂多变的冗余图像也具有较高鲁棒性。

图9 筛除的冗余图像示例(每行从左至右分别为模版帧,连续两幅筛除的冗余图像和非冗余帧)。(a) 典型冗余图像; (b) 存在蠕动的冗余图像; (c) 存在气泡变化的冗余图像; (d) 存在光照变化的冗余图像Fig.9 Examples of screened redundant images (From left to right at each row: template frame, two successive redundant images and nonredundant image). (a) Typical redundant images; (b) Redundant images with peristalsis; (c) Redundant images with bubble changes; (d) Redundant images with illumination changes
为了评估所提冗余图像筛除算法的recall、precision及F-measure性能指标,对随机抽取的10个视频段(共计2 000帧图像)进行了冗余帧的计算机自动筛除,共筛除出920帧冗余图像,通过人工筛除的冗余帧共计1 017帧,之后,将人工筛除结果与本算法的筛除结果对比,并应用本文1.2.4节中算法性能评估指标式(13)~(15)计算,得到的性能指标如表2所示。可以看出,本算法的recall、precision及F-measure性能指标分别达到了81%、90%及85%,效果良好。

表2 胶囊内镜冗余图像筛除方法性能比较Tab. 2 Performance comparison of different algorithms for reducing redundancy in CE videos
注:/表示文献中未给出相应的数据。
Note:/indicates no available related data in literatures.
3 讨论和结论
实验结果表明,所提出的胶囊内镜冗余图像筛除算法在处理速度和准确性等方面具有良好的性能。
表2给出了本算法与其他相关研究文献中提出的方法[4,6-7,10,22]在数据缩减效果、处理速度、recall、precision及F-measure指标上的比较结果。由于相关文献中算法实现的一些细节及参数选择在文献中并没有详细具体说明,因此本研究参考Lee等的文献[4],将相关文献中报导的算法性能数据与所提算法的性能进行对比。
为提高处理速度,Iakovidis等将大小为370像素×370像素原图像尺寸缩减为101像素×101像素,处理速度达到了0.3~0.5 s/帧[7];Lee等则将图像尺寸缩减至80像素×80像素,然后利用他们的方法筛除冗余图像,处理速度能达到约0.5 s/帧[4]。与之相比,本研究在不缩减原图像尺寸的基础上达到了约0.06 s/帧的计算速度,在提高算法速度的同时,又尽可能地保留了原始图像信息,这对医生的后续诊断十分有益。
表2中显示,衡量数据缩减效果的方法有两种:一种是比较冗余图像筛除前后医生所需的诊断时间,具有一定的主观性;另一种是计算筛除的冗余图像帧数占总图像帧数的百分比,较为客观[4]。与表中其他相关文献的数据比较,本算法得到的数据缩减较低。对随机抽取的10个胶囊内镜视频段(每视频段为200帧)的人工筛除结果进行了进一步的分析,发现对不同视频段,筛除的冗余帧数有很大的不同(从几帧到近两百帧),因此在比较数据缩减效果的同时,应结合recall、precision和F-measure指标来评价筛除效果。从表2中可以看出,与已有文献相比,本算法的precision和F-measure指标较好,表明算法误筛较少且综合效果良好。
在所提出的方法中,彩色的胶囊内镜图像被转换为灰度图像以提高算法的处理速度,但相比灰度图像,彩色图像含有更丰富的信息,因此结合SURF算法与颜色信息来筛除胶囊内镜的冗余图像可能会得到更好的结果,这将是后续研究工作的一个重要方向。
胶囊内镜图像的场景复杂多变,且存在气泡、蠕动、光照变化等不确定因素,因此冗余图像的准确、快速自动筛除仍是一个难题。本研究根据胶囊内镜图像的特点,提出了一种基于SURF的胶囊内镜冗余图像的快速筛除方法。对胶囊内镜图像的冗余筛除实验表明,该方法能有效地检测出冗余图像,数据缩减率达到43%。与现有方法相比,该方法对消化道存在的蠕动、气泡及光照变化等不确定因素具有较强的鲁棒性,该方法的处理速度高达0.06 s/帧,F-measure、recall和precision等3个性能指标分别达到了85%、81%、90%,性能良好,对于提高医生的诊疗效率具有重要价值。
[1] Gong Feng, Swain P, Mills T. Wireless endoscopy [J]. Gastrointestinal Endoscopy, 2000, 51(6): 725-729.
[2] Iddan G, Meron G, Glukhovsky A, et al. Wireless capsule endoscopy [J]. Nature, 2000, 405-417.
[3] Koulaouzidis A, Iakovidis DK, Karargyris A, et al. Wireless endoscopy in 2020: Will it still be a capsule? [J]. World J Gastroentero, 2015, 21(17): 5119-5130.
[4] Lee HG, Choi MK, Shin BS, et al. Reducing redundancy in wireless capsule endoscopy videos [J]. Comput Biol Med, 2013, 43(6): 670-682.
[5] 马丽黎,陈世耀,姚礼庆. 穿越肠道的照相机-胶囊内镜[EB/OL]. http://gi.cmt.com.cn/detail/22401.html, 2011-05-16 /2015-07-21.
[6] Liu Hong, Pan Ning, Lu Heng, et al. Wireless capsule endoscopy video reduction based on camera motion estimation [J]. J Digit Imaging, 2013, 26(2): 287-301.
[7] Iakovidis DK, Tsevas S, Polydorou A. Reduction of capsule endoscopy reading times by unsupervised image mining [J]. Comput Med Imaging Graph, 2010, 34(6): 471-478.
[8] Iakovidis DK, Koulaouzidis A. Software for enhanced video capsule endoscopy: challenges for essential progress [J]. Nat Rev Gastro Hepat,2015, 12(3): 172-186.
[9] Li Baopu, Meng MQ, Hu Chao. Motion analysis for capsule endoscopy video segmentation [C]//2011 IEEE International Conference on Automation and Logistics. Taipei: IEEE, 2011:46-51.
[10] Karargyris A, Bourbakis N. A video-frame based registration using segmentation and graph connectivity for Wireless Capsule Endoscopy [C]//Life Science Systems and Applications Workshop. Maryland: IEEE, 2009:74-79.
[11] 潘宁. 胶囊内镜图像序列冗余数据筛查方法研究 [D]. 武汉:华中科技大学, 2013.
[12] Liu Ce, Yuen J, Torralba A, et al. SIFT flow: Dense correspondence across different scenes [C]//Proceedings of the 10th European Conference on Computer Vision: Part III. Marseille: Springer, 2008:28-42.
[13] Bay H, Tuytelaars T, Gool LV. SURF: Speeded up robust features [M]//Computer Vision-ECCV 2006. Berlin: Springer-Verlag, 2006:404-417.
[14] 李秀艳, 刘铁根, 邓仕超, 等. 基于SURF算子的快速手背静脉识别 [J]. 仪器仪表学报, 2011, 32(4): 831-836.
[15] 吴一全, 沈毅, 陶飞翔. 基于NSCT 和 SURF 的遥感图像匹配 [J]. 遥感学报, 2014, 18(3): 618-629.
[16] Lowe DG. Distinctive image features from scale-invariant keypoints [J]. Int J Comput Vision, 2004, 60(2): 91-110.
[17] Lowe DG. Object recognition from local scale-invariant features [C]//Proceedings of the International Conference on Computer Vision (ICCV 1999). Corfu: IEEE, 1999:1150-1157.
[18] Mikolajczyk K, Schmid C. Indexing based on scale invariant interest points [C]// International Conference on Computer Vision (ICCV 2001). Montbonnot: IEEE, 2001:525-531.
[19] Lindeberg T. Feature detection with automatic scale selection [J]. Int J Comput Vision, 1998, 30(2): 79-116.
[20] Neubeck A, Van GL. Efficient non-maximum suppression [C]//Proceedings of the 18th International Conference on Pattern Recognition. Hong Kong: IEEE, 2006:850-855.
[21] Otsu N. A threshold selection method from gray-level histograms [J]. IEEE Trans Syst Man Cybern B, 1979, 9(1): 62-66.
[22] Lee HG, Choi MK, Lee SC. Motion analysis for duplicate frame removal in wireless capsule endoscope [C] //Society of Photo-Optical Instrumentation Engineers Conference Series. Florida: SPIE, 2011: 63-66.
[23] Nancy C. MUC-4 evaluation metrics [C]//The Fourth Message Understanding Conference. Virginia:MCL, 1992: 22-29.
Fast Reducing Redundancy in Capsule Endoscopy Video Based on SURF
Liu Xiaoyan1*Gong Junhui1,3Li Xiangdong2Wu Weining1Peng Tongsheng1
1(CollegeofElectricalandInformationEngineering,HunanUniversity,Changsha410082,China)2(SuzhouOIHMedicalScientificLTD.CO.,Suzhou215000,Jiangsu,China)3(CollegeofElectricalandInformationEngineering,HunanInstituteofEngineering,Xiangtan411101,Hunan,China)
Capsule endoscopy captures tens of thousands of images through the whole digestive system with a large number of redundant images. To determine abnormal images would consume considerable time and effort of medical doctors by checking each frame. Therefore, it is meaningful to screen out the redundant images automatically. In this paper, feature points and the corresponding feature vector was extracted in successive capsule endoscopy frames with SURF. Vector angular was applied to evaluate the matching degree between two feature points from the successive frames. Maximum between-class variance was used to identify the matched feature points adaptively. Finally, the quantity of matched feature points and block matching degree was used as the index to screen out redundant images. Experimental tests in captured 128 videos by capsule endoscopy demonstrate that the proposed approach has a rapid processing speed of 0.06 seconds/frame, with good performance in the recall, precision and F-measure index (81%, 90%, and 85%, respectively). Moreover, it shows good robustness to uncertainties such as peristalsis, illumination and bubbles.
capsule endoscopy;speeded up robust features (SURF);feature matching;redundant images
10.3969/j.issn.0258-8021. 2016. 03.002
2015-07-31, 录用日期:2015-12-18
国家自然科学基金(61374149);教育部博士点基金(20130161110010);湖南省自然科学基金(13JJA33)
TP391. 4
A
0258-8021(2016) 03-0264-08
*通信作者(Corresponding author), E-mail: xiaoyan.liu @hnu.edu.cn
猜你喜欢
小哥白尼(军事科学)(2022年2期)2022-05-25
新高考·高一数学(2022年3期)2022-04-28
中学生数理化(高中版.高考数学)(2021年1期)2021-03-19
数理化解题研究(2021年1期)2021-02-02
中学生数理化·七年级数学人教版(2020年12期)2021-01-18
语数外学习·高中版上旬(2020年8期)2020-09-10
红领巾·萌芽(2019年8期)2019-08-27
中学生数理化·高一版(2018年5期)2018-06-04
中国与非洲(法文版)(2017年10期)2017-11-23
高中生学习·高三版(2016年9期)2016-05-14
