
基于直觉模糊推理的天基海洋监视系统贡献度评估研究
2016-02-15 09:07:56姜剑雄赵育善
上海航天 2016年6期
姜剑雄,赵 毅,师 鹏,赵育善
(1.北京航空航天大学 宇航学院,北京 100191; 2.上海卫星工程研究所,上海 201109)
基于直觉模糊推理的天基海洋监视系统贡献度评估研究
姜剑雄1,赵 毅2,师 鹏1,赵育善1
(1.北京航空航天大学 宇航学院,北京 100191; 2.上海卫星工程研究所,上海 201109)
针对传统天基海洋监视系统贡献度评估方法存在权重计算主观性强,难以应对作战不确定性等问题,提出一种基于直觉模糊推理的评估方法。首先讨论了系统贡献度概念,采用覆盖品质因数、覆盖范围、目标发现概率、定位精度、分辨能力、传输与处理能力,以及抗干扰能力指标评估海洋目标监视系统贡献度。其次设计了评估指标的隶属度函数与非隶属度函数,用不同模糊化策略对各输入变量进行多级量化。再次,建立直觉模糊推理规则,设计了max-min推理合成算法,将重心法作为解模糊算法,考虑隶属度与非隶属度大小对直觉指数的影响并进行修正,检验了所建规则的合理性。用典型目标监视实例对评估方法的有效性进行验证,结果表明直觉模糊推理评估法能有效处理系统贡献度评估中的模糊或不确定的问题。研究为航天武器系统贡献度评估提供了新的解决方法。
天基海洋监视; 系统贡献度; 直觉模糊推理; 效能提升度; 推理规则; 推理算法; 解模糊; 评估方法
0 引言
信息化战争中宇宙空间是侦察监视的制高点。天基海洋目标监视相比其它陆、海、空基探测手段,具有覆盖区域广、持续时间长、不受空域国界和地理条件限制、安全性高的战略价值与信息优势[1]。为有效分析天基海洋监视系统结构,科学合理地规划系统的发展路线,促进系统侦察监视能力的提升,必须研究海洋监视系统内装备的贡献度问题。系统(包括体系)贡献度(CSW)是指被评武器装备纳入作战系统后,所形成的系统作战能力以及使系统作战能力在原有基础上的变化程度[2-3]。目前系统贡献度的评估还处于发展阶段,且以体系贡献度的评估研究为主。文献[4]剖析了体系贡献度的基本概念,界定了其内涵和分类。文献[5]提出了武器装备体系贡献度评估的一般过程与主要特点。文献[6]用粗糙集理论对体系贡献度进行分析、评估,较好地解决了评估指标和评估标准模糊性的问题。文献[7]提出了采用规则描述“能力-任务”映射关系的方法推理海军航空作战装备对任务的支撑,从而分析装备对任务的贡献度。这些方法都存在相应的适用情况,但在应对作战不确定性及指标推理聚合等方面还存在不足。为此,本文提出一种基于直觉模糊推理(IFR)的海洋监视系统贡献度评估方法。直觉模糊集(IFS)是对Zadeh模糊集(ZFS)的有效扩充和发展[8]。在语义表达上,直觉模糊集的隶属度、非隶属度及直觉指数可分别表示支持、反对、中立三种状态,可较ZFS,IFS更细腻地描述客观对象的自然属性,同时,IFS的合成计算精度与推理规则符合度显著提高,在处理模糊概念的不确定问题等方面更具灵活性和实用性[9]。IFS已在多准则决策、目标识别、态势与威胁评估等方面取得了成功应用,因而引起众多学者的关注。本文讨论了天基海洋监视系统贡献度的概念内涵及其评估指标,用多种隶属度函数设计直觉模糊推理系统,依据实际情况对推理规则进行简化,并用仿真验证该法的有效性。
1 天基海洋监视系统贡献度分析
1.1 系统贡献度概念
系统贡献度是对评估对象对系统内各子系统作战能力及整个系统作战能力的影响作用或涌现效应的度量,从内涵上可将其分为两个方面:一是贡献者(如指挥控制系统)提供的支持满足受益方(如武器系统)需求的程度,即需求满足度,可用于作战系统内各子系统的相互贡献度评估,评估过程类似于传统系统作战能力(作战效能)评估;二是由于贡献者(被评武器装备)的使用而使原系统作战能力(作战效能)的提升程度,即效能提升度,通过对武器装备使用前后作战能力的变化进行对比分析,可获得武器装备的系统贡献度[4]。
为分析新型武器装备的使用对系统作战效能的总体提升作用,本文用效能提升度概念定义装备Wi对天基海洋目标监视系统贡献度
(1)
式中:RS为海洋目标监视系统S的作战效能;RS-Wi为不包含装备Wi的海洋目标监视系统S-Wi的作战效能。
1.2 系统贡献度评估指标
天基海洋监视系统通过侦察(包括成像侦察、电子侦察和海洋监视)卫星、通信/中继卫星、气象卫星等探测、定位、跟踪、识别、监视海面状态和舰船、潜艇等海洋目标,并侦收、窃听舰载雷达、通信和其它电子设备发出的无线电信号[10]。天基海洋监视系统贡献度评估是一个过程复杂、因素众多的不确定性问题,其评估结果受评估数据、评估环境(气象、海洋等)、评估对象数量与部署、卫星任务规划调度等影响。理论上,考虑的评估因素越多,所得结果就越可信,但从实现考虑,评估因素过多,则容易产生“组合爆炸”,从而使评估过程复杂化,不易甚至不能实现。因此,为兼顾评估的准确性和计算复杂度,在不影响海洋监视系统贡献度评估问题本质的前提下,本文对评估因素作了简化处理,选取覆盖品质因数、覆盖范围、目标发现概率、定位精度、分辨能力、传输与处理能力及抗干扰能力等参数进行分析,得到系统贡献度评估指标与其影响因素如图1所示。
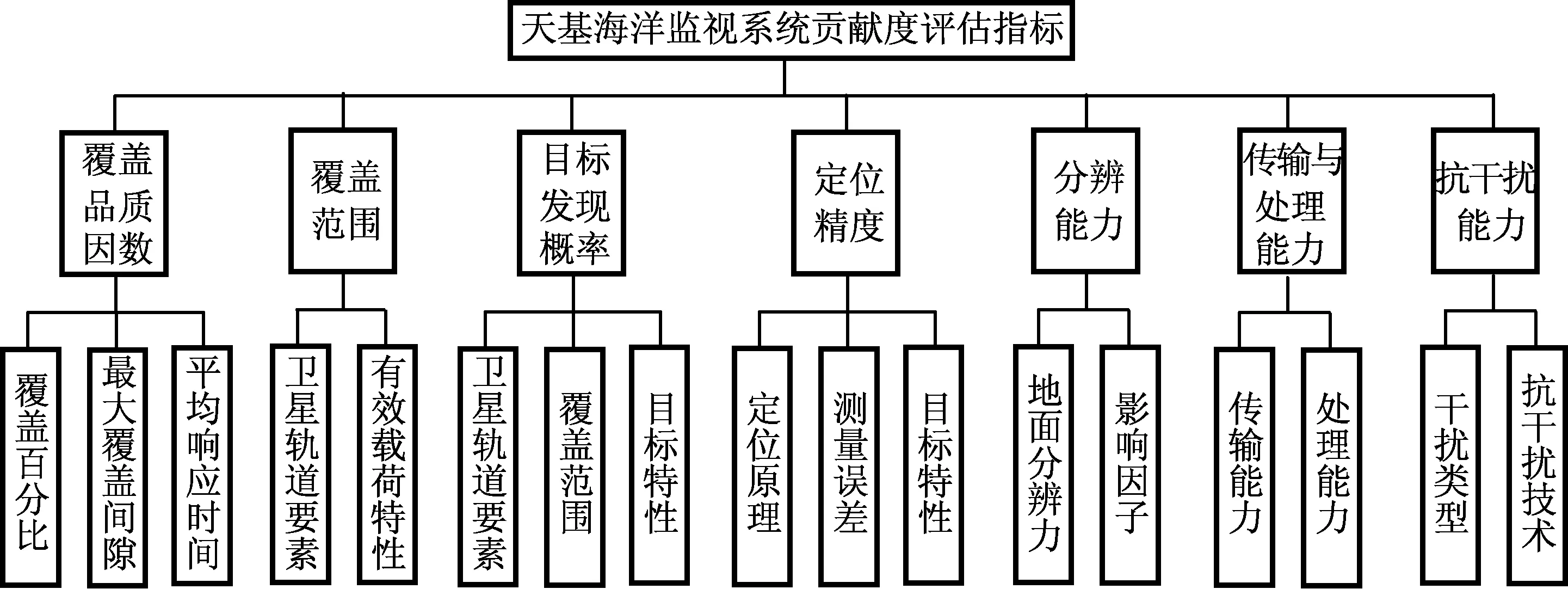
图1 天基海洋监视系统贡献度评估指标Fig.1 Evaluation index system of CSW for space-based ocean surveillance
2 系统贡献度的直觉模糊推理方法
用直觉模糊推理方法进行海洋监视系统贡献度评估求解时,先建立输入状态变量的属性函数,再在确定的模糊空间中建立推理合成规则,设计推理算法和解模糊算法,最后由输出映射曲面检验规则的合理性。
2.1 状态变量的属性函数
根据天基海洋监视系统贡献度评估问题描述及指标特性,设计系统状态变量覆盖品质因数、覆盖范围、目标发现概率、定位精度、分辨能力、传输与处理能力、抗干扰能力的隶属度函数与非隶属度函数。目前,状态变量的隶属度函数主要依据实践经验确定,对同一模糊概念,不同的人因认识水平各异,会建立不同的隶属函数。综合人们的经验,常用的确定方法有主观经验法、模糊统计法和指派法等[11]。为便于推理规则的研究与计算,依据文献[9、11],本文采用高斯型隶属度函数,即
(2)

(3)
a)覆盖品质因数论域T

b)覆盖范围论域C

c=
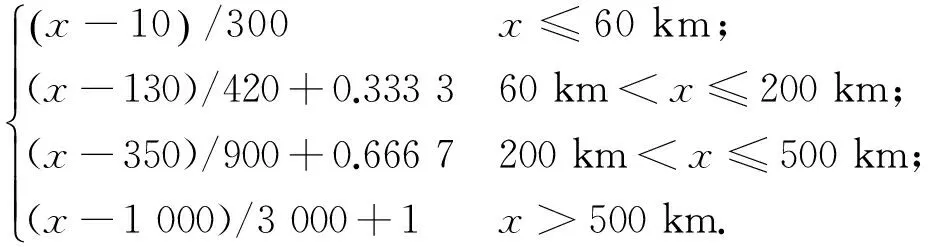
(4)
c)目标发现概率论域G
g=

(5)
d)定位精度论域P

(6)
e)分辨能力论域Q
设系统的分辨能力变化范围为[0.1,60]m,对状态变量分辨能力q划分为弱[0.166 7,0]、中[0.166 7,0.333 3]、较强[0.166 7,0.666 7]、强[0.166 7,1]共4个等级,分别对应直觉模糊子集Q1,Q2,Q3,Q4。输入变量q的归一化函数为

(7)
f)传输与处理能力论域H
系统的信息传输与处理能力分为弱、中、强三类,分别对应直觉模糊子集H1,H2,H3。因该指标可区分度小且较难获取,本文忽略此因素的影响[13]。
g)抗干扰能力论域D
h)输出论域U
按照天基海洋监视系统作战效能等级划分为7级:很低(VL)、低(LE)、较低(RL)、中等(ME)、较高(RH)、高(HE)、很高(VH),分别对应直觉模糊子集U1[0.083 3,0],U2[0.083 3,0.166 7],U3[0.083 3,0.333 3],U4[0.083 3,0.5],U5[0.083 3,0.666 7],U6[0.083 3,0.833 3],U7[0.083 3,1]。
2.2 推理规则与推理算法
天基海洋监视系统的输入参数t,c,g,p,q,d等状态变量属性函数的个数分别为Nt=3,Nc=4,Ng=3,Np=3,Nq=4,Nd=3,系统输出量的属性函数个数Nu=7。系统的理论推理规则数量
N=Nt·Nc·Ng·Np·Nq·Nd=1 296.
(8)
此处与前文相同,从实现考虑对规则进行简化,以避免“组合爆炸”。为此,可忽略一些次要或难以获取的因素,如传输与处理能力,并考虑以下情况进行简化:
a)若覆盖品质因数低,或覆盖范围小,或抗干扰能力弱,则系统作战效能等级在较高级之下(包含较高级);
b)当不满足前提条件a)时,若覆盖品质因数高,或覆盖范围超大,或目标发现概率高,且抗干扰能力强,则系统作战效能等级在高级之上(包含高级);
c)当不满足前提条件a)、b)时,若定位精度高,或分辨能力强且抗干扰能力强,则系统作战效能等级在中等级之上(包含中等级)。
由此,可减少系统推理规则的总数。推理规则是多重多维的,其形式为
IftisTitandcisCicandgisGigandpisPipandqisQiqanddisDid,
thenzisOj(CFi).
式中:it=1,2,…,Nt;ic=1,2,…,Nc;ig=1,2,…,Ng;ip=1,2,…,Np;iq=1,2,…,Nq;id=1,2,…,Nd;j=1,2,…,Nu;t,c,g,p,q,d为输入变量;z为输出变量;Tit,Cic,Gig,Pip,Qiq,Did为推理规则前提部分语言项,且〈t,μTi,γTi〉,t∈T,〈c,μCi,γCi〉,c∈C,〈g,μGi,γGi〉,g∈G,〈p,μPi,γPi〉,p∈P,〈q,μQi,γQi〉,q∈Q,〈d,μDi,γDi〉,d∈D;Oj为输出论域中的一个模糊子集Uk;k=1,2,…,Nu;CFi为第i条规则可信度,本文取为1。
本文采用max-min推理合成算法。系统总的直觉模糊关系
R=
(∪…∪)R(Tit,Cic,Gig,Pip,Qiq,Did,CFi;Oj)=
(∪…∪)R(Tit∩Cic∩Gig∩Pip∩Qiq∩
Did∩CFi∩Oj).
(9)
式中:∪,∩分别表示直觉模糊集合的并、交运算,即
μR(t,c,g,p,q,d,z)=
(∨…∨)(μTit(t)∧μCic(c)∧μGig(g)∧
μPip(p)∧μQiq(q)∧μDid(d)∧μUj(z)∧
CFi);
(10)
CFi.
(11)
设某一时刻的输入为(T′,C′,G′,P′,Q′,D′),由推理合成规则,得到输出
O′=(T′×C′×G′×P′×Q′×D′)∘R.
(12)
即
μO′(z)=∨(μT′(t)∧μC′(c)∧
μG′(g)∧μP′(p)∧μQ′(q)∧μD′(d)∧
μR(t,c,g,p,q,d,z));
(13)
γO′(z)=∨(γT′(t)∧γC′(c)∧
γG′(g)∧γP′(p)∧γQ′(q)∧γD′(d)∧
γR(t,c,g,p,q,d,z)).
(14)
式中:∀t∈T;∀c∈C;∀g∈G;∀p∈P;∀q∈Q;∀d∈D;∀z∈U。
2.3 解模糊算法
解模糊是将模糊输出转化为相应的清晰量,常用的直觉模糊集的解模糊算法有最大真值法、重心法、加权平均法等。鉴于重心法的输出推理控制较平滑,本文采用该法,其原理是取隶属度函数和非隶属度函数合成的真值函数曲线与横坐标围成面积的重心为直觉模糊推理的最终输出值[12]。即
(15)
式中:U为输出论域;F为定义在输出论域U中的直觉模糊子集。因直觉指数代表中立者的态度,式(15)将中立者的态度一分为二的方法不完全合理,故综合考虑隶属度与非隶属度的大小对直觉指数的影响[14]。式(15)改进后可得

(16)
对本文Nu个输出量化级数的离散论域,需将各级量化输出结果进行合成,有
u0=
(17)
2.4 规则检验
规则库检验主要分析规则库中包含的规则的完备性、互作用性和相容性。完备性要求对任一种输入状态,总可在规则库中找到一条规则,使此输入状态与该规则前件的匹配度大于ε,该规则可在ε程度上被激活。设计规则库时,ε通常可取0.5。因本文输入论域中定义的基本直觉模糊子集是相交、重叠的,且两两相交的基本直觉模糊子集在交点处的隶属度函数与非隶属度函数的合成真值均大于ε,故系统满足完备性要求。同理,用文献[9]方法对本文规则库进行互作用性和相容性检验,发现其均在一个合理的范围内,表明所建规则合理、有效。
此外,推理规则的合理性检验可直观地通过推理系统输出的三维空间映射曲面是否平滑得到验证,推理系统的部分三维空间映射曲面如图2 所示。由图2可知:输出映射曲面均是平滑的,表明所建推理规则合理。
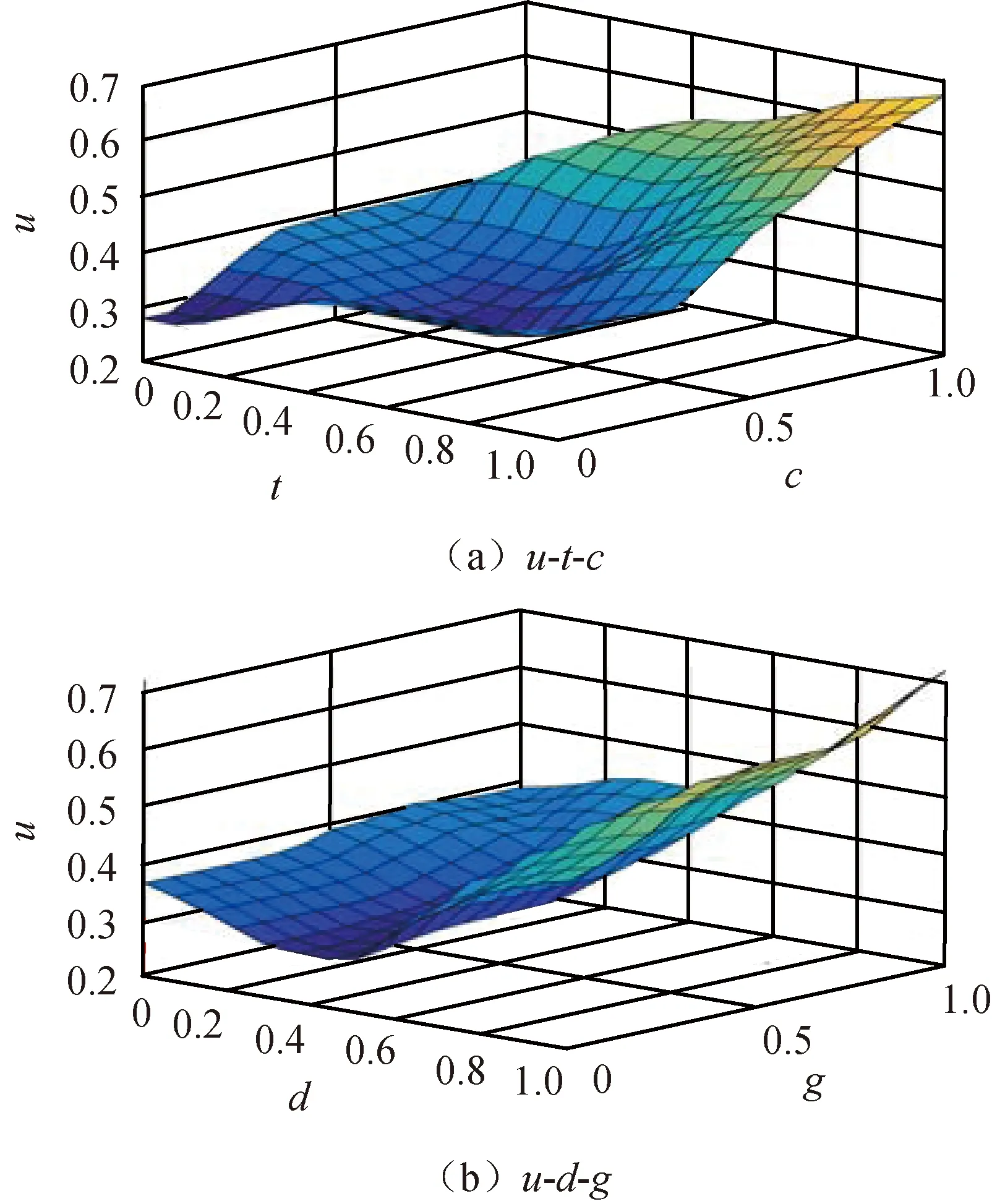
图2 输出三维空间映射曲面Fig.2 Output three-dimensional space mapping surface
3 仿真
以舰船目标监视对本文方法的评估过程进行验证。天基海洋监视系统贡献度评估分为4步:
a)以文献资料和专家知识为基础,基于场景通过仿真、试验等获取评估数据;
b)根据状态变量的属性函数求取相应的输入变量值;
c)提供输入向量,运用直觉模糊推理机进行求解;
d)将推理结果代入式(1)求取被评装备的系统贡献度。
因本文仿真主要是验证评估方法的可行性和有效性,对仿真实验活动、评估数据采集过程等进行简化处理。假设在某舰船编队目标监视想定中,对某5种天基信息系统进行贡献度评估,其主要评估指标参数见表1[10]。
以表1中系统2为例,覆盖品质因数属于“高”等级,变量t=0.80;地面覆盖宽度400km,属于“大”等级,覆盖范围变量c=0.722 3;目标发现概率0.93,属于“中”等级,发现概率变量g=0.50;定位精度1.5 km,属于“高”等级,定位精度变量p=0.925 0;分辨力3m,属于“强”等级,分辨能力
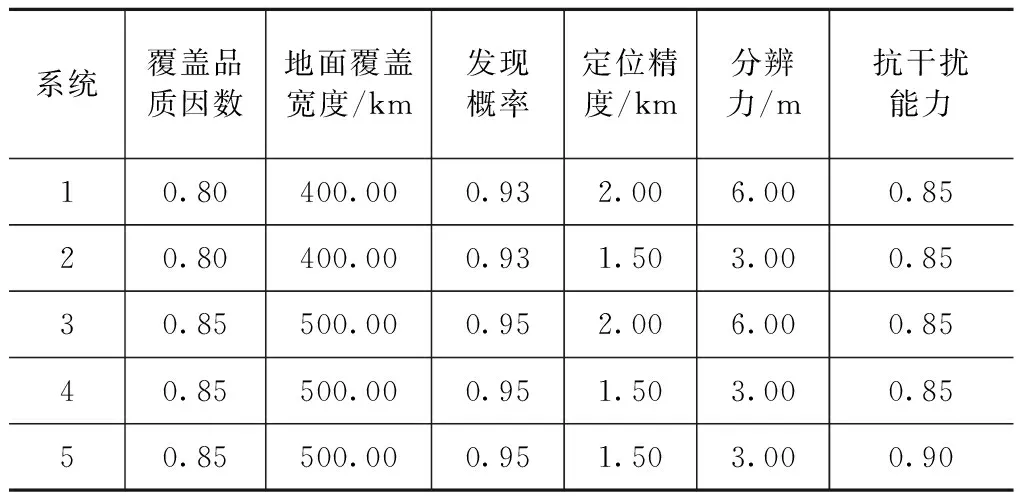
表1 海洋监视系统指标参数
变量q=0.833 3;抗干扰能力属于“强”等级,变量d=0.85。因此,系统2推理输入向量将I作为推理机的输入,根据推理计算规则得到系统2作战效能u=0.723 1。推理求解过程如图3所示,图3的具体内容见参考文献[15]。

[0.80 0.722 3 0.50 0.925 0 0.833 3 0.85].
仿此步骤,得到各系统的效能评估结果见表2。以系统1为评估基准,根据式(1)计算提高成像侦察卫星分辨力及定位精度对天基海洋监视系统贡献度

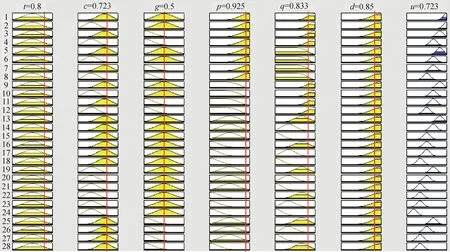
图3 系统2效能评估推理求解Fig.3 Reasoning solution of evaluating effectiveness of system 2

系统覆盖品质因数覆盖范围发现概率定位精度分辨能力抗干扰能力输出效能10.80000.72230.50000.85000.69050.85000.650020.80000.72230.50000.92500.83330.85000.723130.85000.83330.72500.85000.69050.85000.697140.85000.83330.72500.92500.83330.85000.760050.85000.83330.72500.92500.83330.90000.7685
同理,可得提高电子侦察卫星覆盖品质因数、地面覆盖宽度等对天基海洋监视系统贡献度。
由本文简化的模糊推理规则可知:上述定量分析与领域专家的定性判断基本一致。由实例结果可发现,用直觉模糊推理的方法研究海洋目标监视系统贡献度评估,推理规则明确,逻辑思路清晰,能有效处理系统贡献度评估中的模糊或不确定问题。其主要缺点是随着考虑因素的增多,建立推理规则库难度较大,且易产生“组合爆炸”,需通过评估因素优化选择、推理规则合并简化、增加自适应学习算法等予以解决[16]。
4 结束语
系统贡献度是衡量武器装备在作战对抗中所发挥作用的关键因素。本文针对天基海洋监视系统贡献度的综合评估问题,分析了系统贡献度的概念内涵及影响因素,给出了简化的贡献度评估指标,并提出一种基于直觉模糊推理的海洋监视系统贡献度评估方法。仿真结果表明该方法能给出有效的系统贡献度量化评估结果,与粗糙集、结构方程模型(SEM)等贡献度评估方法相比,其逻辑清晰,计算量小,较好地解决了由知识模糊性引起的不确定性问题,对航天武器装备发展论证及规划部署有一定的参考意义。实际工程应用中,此方法的不足之处是建立推理规则库难度较大。后续可将认知计算与评估方法结合,运用认知计算解决因考虑因素增多产生的“组合爆炸”问题。
[1] 徐一帆, 谭跃进, 贺仁杰, 等. 天基海洋目标监视的系统分析及相关研究综述[J]. 宇航学报, 2010, 31(3): 628-640.
[2] 赵青松, 杨克巍, 陈英武, 等. 体系工程与体系结构建模方法与技术[M]. 北京: 国防工业出版社, 2013.
[3] 罗小明, 朱延雷, 何榕. 基于SEM的武器装备作战体系贡献度评估方法[J]. 装备学院学报, 2015, 26(5): 1-6.
[4] 管清波, 于小红. 新型武器装备体系贡献度评估问题探析[J]. 装备学院学报, 2015, 26(3): 1-5.
[5] 李怡勇, 李智, 管清波, 等. 武器装备体系贡献度评估刍议与示例[J]. 装备学院学报, 2016, 26(4): 5-10.
[6] 王楠, 杨娟, 何榕. 基于粗糙集的武器装备体系贡献度评估方法[J]. 指挥控制与仿真, 2016, 38(1): 104-107.
[7] 叶紫晴, 屈也频. 基于规则推理的海军航空作战装备体系贡献度分析[J]. 指挥控制与仿真, 2015, 37(5): 29-33.
[8] ATANASSOV K. Intuitionistic fuzzy sets[J]. Fuzzy Sets and Systems, 1986, 20(1): 87-96.
[9] 雷英杰, 赵杰, 路艳丽, 等. 直觉模糊集理论及应用[M]. 北京: 科学出版社, 2014.
[10] 曹裕华, 冯书兴, 管清波, 等. 航天器军事应用建模与仿真[M]. 北京: 国防工业出版社, 2010.
[11] 曾光奇, 胡均安, 王东, 等. 模糊控制理论与工程应用[M]. 武汉: 华中科技大学出版社, 2006.
[12] 雷英杰, 王宝树, 王毅. 基于直觉模糊推理的威胁评估方法[J]. 电子与信息学报, 2007, 29(9): 2077-2081.
[13] 沈如松, 朱世界. 天基海洋监视体系方案设计与综合评价[J]. 海军航空工程学院学报, 2006, 21(4): 405-409.
[14] 蔡纪伟, 贾云献, 孙晓, 等. 直觉模糊推理的装备保障指挥决策模型[J]. 火力与指挥控制, 2013, 38(2): 31-34.
[15] 张国良, 曾静, 柯熙政, 等. 模糊控制及其MATLAB应用[M]. 西安: 西安交通大学出版社, 2002.
[16] 雷阳, 雷英杰, 华继学, 等. 基于自适应直觉模糊推理的目标识别方法[J]. 系统工程与电子技术, 2010, 32(7): 1471-1475.
Evaluation Study of Contribution to System Warfighting for Space-Based Ocean Surveillance Based on Intuitionistic Fuzzy Reasoning
JIANG Jian-xiong1, ZHAO Yi2, SHI Peng1, ZHAO Yu-shan1
(1. School of Astronautics, Beihang University, Beijing 100191, China;2. Shanghai Institute of Satellite Engineering, Shanghai 201109, China)
Because commonly used evaluation method of contribution to system warfighting (CSW) for space-based ocean surveillance was strongly subjective with weight calculation and could not solve the combat uncertain problems, an evaluation method based on intuitionistic fuzzy reasoning (IFR) was proposed. First, the conception of CSW was discussed. The evaluation index system of CSW for ocean target surveillance was built and normalized including coverage quality factor, coverage, target finding probability, location precision, resolution, transmission and treatment ability, and anti jamming ability. Then, the membership and nonmembership functions of the evaluation indices were designed. The methods for multistage quantification to input variables in fuzzy strategy were addressed. Subsequently, the inference rules of the system were constructed. The maximum and minimum algorithm of reasoning was designed. The barycenter method was served to defuzzification. The effect of values of membership and nonmembership on intuitionistic factor was in consideration and the equation was modified. The rationality of constructed rules was checked. An instance of typical target surveillance was used to verify the validity of the evaluation method. The simulation results showed that the method of IFR could solve ambiguous or uncertain problems in evaluation of CSW. It also provided new way to evaluation of CSW for space weapon and equipment.
Space-based ocean surveillance; Contribution to system warfighting; Intuitionistic fuzzy reasoning; Improvement of effectiveness; Inference rules; Reasoning algorithms; Defuzzification; Evaluation method
1006-1630(2016)06-0115-07
2016-08-13;
2016-09-25
国家自然科学基金资助(11572019);上海航天科技创新基金(SAST2015027)
姜剑雄(1992—),男,硕士生,主要从事飞行器总体设计、航天器动力学与控制研究。
E917; TP391
A
10.19328/j.cnki.1006-1630.2016.06.017
猜你喜欢
国际太空(2022年1期)2022-03-09 06:04:40
空间科学学报(2021年2期)2021-07-21 08:43:40
趣味(数学)(2020年12期)2020-06-09 05:39:18
石河子大学学报(哲学社会科学版)(2019年3期)2019-07-27 01:33:48
中国生物医学工程学报(2019年4期)2019-07-16 08:04:10
航天电子对抗(2019年4期)2019-06-02 08:22:50
电子测试(2018年14期)2018-09-26 06:04:28
电力自动化设备(2015年4期)2015-09-28 02:42:54
汽车零部件(2015年8期)2015-06-23 13:53:51
航天返回与遥感(2014年1期)2014-07-31 17:55:36
