
全膜双垄沟地膜捡拾机的设计
2016-02-13 06:15吴一非戴飞赵武云吴正文李勇
干旱地区农业研究 2016年6期
吴一非,戴飞,赵武云,吴正文,李勇
(1.甘肃农业大学工学院,甘肃兰州730070;2.武威兴旺农机制造有限公司,甘肃武威733000)
全膜双垄沟地膜捡拾机的设计
吴一非1,戴飞1,赵武云1,吴正文2,李勇1
(1.甘肃农业大学工学院,甘肃兰州730070;2.武威兴旺农机制造有限公司,甘肃武威733000)
为了解决地膜污染问题,通过对国内外地膜捡拾机的研究和借鉴,研制出全膜双垄沟地膜捡拾机。运用SolidWorks motion功能仿真弹齿M点的运动轨迹和X方向线性速度,得出收膜滚筒的转速为80 r·min-1,通过设计计算和考虑其它因素得出入土角为25°;在此基础上增加反向推膜机构,对集膜滚筒机械进行改进优化并做出样机。实验表明,该样机作业生产率为0.4~0.6 hm2·h-1,地膜捡拾率为90%,使用可靠性为98%,工作效率高,制造成本低,适应性强。
地膜捡拾机;全膜双垄沟;设计;优化
旱地全膜双垄沟播模式是甘肃省在传统地膜覆盖技术基础上,将地膜覆盖与垄沟种植相结合的一项集雨、保墒、抗旱新技术[1-3]。该技术可显著提高旱农田降水的保蓄率、利用率和作物水分利用效率,其中玉米全膜覆盖双垄沟播增产效果十分显著[4-6]。但地膜在土壤中残留的时间很长,破坏农田生态环境,致使农作物减产,造成白色污染,人工捡拾地膜费时费力。针对上述问题,研制出全膜双垄沟地膜捡拾机。王波等[7]对旱地全膜双垄沟残膜捡拾机的设计,解决了人工捡拾地膜费时费力问题,但其设计也有所不足。第一,挑膜齿安装在凸轮中,在滚筒转动过程可能出现卡死现象;第二,其运动时,起膜装置与滚筒位于机架运动方向的前方,滚筒旋转方向与行走轮方向相反,挑起的残膜在外界坏境的影响下会脱离挑膜齿,严重影响残膜捡拾率;第三,其不能将小垄中的地膜分离,影响挑膜齿捡拾残膜捡拾率。本文针对以上出现的问题,研制出一种全膜双垄沟地膜捡拾机,运用偏心块等装置解决了可能出现卡死的问题;将起膜装置与滚筒后置以及运用仿形耙齿机构使残膜捡拾率提高;运用仿形切膜装置解决地膜分离问题,提高残膜捡拾率。并结合研制样机进行室内实验,对其关键装置进行进一步改进和优化。
1 整机机构及工作原理
1.1 整机结构
全膜双垄沟地膜捡拾机如图1所示(见296页)。样机结构如图1a所示,传动装置由换向变齿齿轮箱等部件组成,残膜回收装置由耙齿、副齿、收膜滚筒、伸缩齿、偏心块等部件组成,拨膜装置由拨膜器等部件组成,收膜装置由集膜箱、压膜装置等部件组成,以及卸膜装置与行走轮。样机由机架、传动装置、残膜回收装置、拨膜装置、收膜装置、卸膜装置等部分组成(图1b)。
1.2 工作原理
样机采用耙齿耙出地膜,伸缩齿将其捡起,拨膜器将捡起地膜拨到集膜箱中的捡膜、卸膜过程。作业时,由拖拉机牵引机架、行走轮和切膜圆盘在拖拉机牵引下自行行走,相距400mm的两把切膜圆盘刀将小垄中的膜切开,耙齿从地表中将地膜耙起,通过副齿将地膜拥起,伸缩齿挑起地膜。传动系统通过换向变齿齿轮箱伸出传动轴与拖拉机动力输出轴相联。拖拉机通过传动系统带动收膜滚筒转动,收膜滚筒带动伸缩齿在偏心块轴上转动,由伸缩齿伸缩将膜捡拾,收膜滚筒通过链传动将动力传到拨膜器,拨膜器将伸缩齿上的膜拨到集膜箱,拨膜器通过链传动将动力传到压膜装置上,压膜装置转动,其上压膜装置将膜往下压制,从而节约出空间集膜,最后完成卸膜作业。
1.3 主要技术指标
样机一次作业可实现捡膜卸膜工作,其主要技术参数指标如表1所示。

表1 主要技术指标Table 1 Main technical index
2 重要部件设计
2.1 偏心杆齿
偏心杆齿如图2所示,铰接弹齿铰接到转子上,固定弹齿焊接到转上,从而转子上有一根铰接弹齿和一根固定弹齿,其角度为180°,这样就避免在转动过程中出现弹齿被卡死现象。偏心块调节角度固定后,固定弹齿在收膜滚筒转动带动下带动转子转动,转子通过孔隙配合在轴上,轴安装在偏心块两边的推力轴承上转动,此设计防止转子在轴上转动干摩擦力太大以致出现被卡死现象而使弹齿变形。当其出现卡死现象时,转子可以带动轴在两边推力轴承上一起转动。

图2 捡膜装置结构简图Fig.2 Structure diagram of the film collecting device
2.1.1 伸缩齿的运动分析伸缩齿安装在滚筒内,在随滚筒一起转动过程中,齿顶部M的运动方程为[8-12]:

式中,R为滚筒半径;l为齿杆的长度;α为滚筒转角;e为偏心距λ=e/R;ρ=(1-2λcosα+λ2)1/2;周期T=2πR;极大点Ak[(2k-1)πR,2R];极小点Bk(2kπR,-2ρ)。
其运动轨迹如图3所示。

图3 伸缩齿杆顶部M的运动轨迹Fig.3 The moving track of M point of the top telescopic rod
2.1.2 SolidWorks motion运动仿真在SolidWorks的插件Slidworks motion中将偏心机构进行模拟仿真。样机前进速度为1.5m·s-1保持不变,设计其滚筒转动速度为50、80、120 r·min-1,得出弹齿M点在Motion仿真运动轨迹和弹齿X方向线性速度,如图4、5所示。
图4所示得出结论:当收膜滚筒速度越大,其下拾膜扣环就越大,出现余摆线越明显,滚筒转速越快,不能与前进速度协调,地膜就容易被扯断,从而影响整个捡膜效率;当余摆线现象不明显时,说明收膜滚筒转速与整机前进速度相互协调,但如果小到没有扣环,说明伸缩齿拾膜不连贯,出现漏拾情况。
图5所示得出结论:滚筒转速越大其弹齿X向线性速度变化就越快,由此对收膜滚筒上的导向套磨损也就越大,从而减少捡膜装置的寿命。根据Motion模拟仿真与实际各因素考虑选择收膜滚筒的转速为80 r·min-1。
2.2 仿形耙齿
耙齿在拖拉机牵引下耙起地中的地膜,副齿的作用是将耙起的地膜拥住,如果没有副齿,地膜被耙起以后会向上飘,在有风的环境中地膜会被吹飞,致使捡膜机不能达到捡膜效果。仿形耙齿如图6所示。
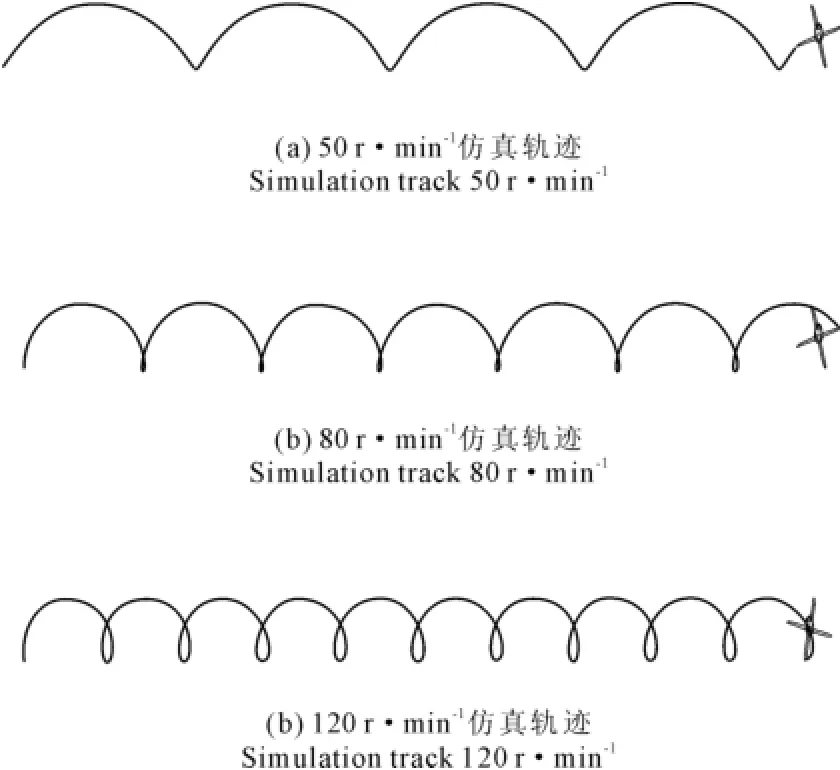
图4 M点Motion仿真运动轨迹Fig.4 The simulated Motion track of M point

图5 弹齿X方向线性速度Fig.5 Linear velocity of the elastic tooth at X direction

图6 仿形耙齿结构简图Fig.6 Structure diagram of copying harrow tooth
耙齿通过铰链连接到机架上,弹簧安装在支撑杆上,形成了仿形机构,弹簧会根据耙齿在田间运动情况而变化,支撑杆与机架连接而承受耙齿田间运动受到的作用力。耙齿入土角通过拖拉机丝杠来调节。
仿形耙齿入土角设计:选择耙齿入土角的原则是在不拥堵的前提下,将残地膜抬起一定高度,使伸缩齿可靠地捡拾地里的地膜。图7为仿形耙齿的受力图,可从理论中确定地膜及土壤所受作用力的平衡方程[13-15]:

式中,T为地膜及土壤在耙齿面移动所需的力(N);F为耙齿面对地膜及土壤的摩擦力(N);N1为耙齿面对地膜及土壤的作用力(N);G为耙起地膜及土壤的的重力(N)。
从以上方程可以得到

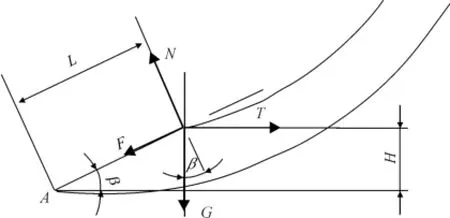
图7 仿形耙齿受力图Fig.7 Bearing force chart for copying harrow tooth
从以上公式中可以得出倾角β过大,耙起的地膜及土壤就会拥堵在耙齿面,从而不能拥起到副齿而滑下。从以上理论设计入土角计算与实际中耙起地膜与土壤的高度及土壤的性能确定,综合得出β取值范围为20°~30°。此设计中采用β=25°。
2.3 仿形切膜装置
切膜装置由切膜机架、弹簧、切膜圆盘刀等机构组成,如图8所示。
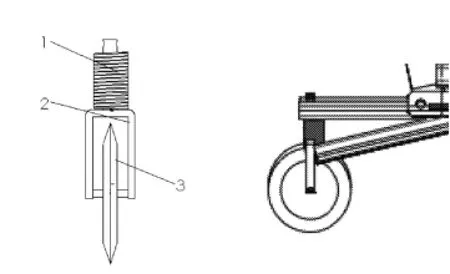
图8 切膜装置结构简图Fig.8 Structure diagram for the cutting film device
切膜装置主要作用是在全膜双垄沟中切除小垄中覆着土的地膜,从而将原来覆土的地膜变为地膜边缘覆土,利于机器回收。该机构直接嫁接在整机机架上,其为仿形机构,在作业时遇到根茬或较硬土块时,弹簧在力的作用下上下移动,切膜机架上端联接在整机机架条形孔,整机机架上的方形钢与切膜机架焊接连接形成三角形机构。在作业过程中,遇到根茎硬茬时,切膜支架可以在条形孔中上下前后左右移动,绕过根茬中心,在根茬周边切除地膜,达到仿形作用。
3 关键装置改进与优化
通过实验发现如下问题:(1)当收膜滚筒捡膜到达上方,由拨膜器拨到集膜箱中。实验过程中有膜顺着收膜滚筒继续向下运动没有被收集到集膜箱中;(2)集膜箱太小,从而不能满足收集地膜要求。根据以上问题,对样机关键装置进行改进与优化。
3.1 反向推膜机构
反向推膜机构由起膜轴和起膜橡胶转子组成如图9所示,其位置在收膜滚筒和集膜箱之间,伸缩齿将膜挑到上方时,拨膜机构将膜拨到反向推膜机构上,反向推膜机构将膜转到集膜箱,在这过程中捡拾的田间杂物根茬将从反向推膜机构空隙中掉落到田间。经试验,其转速是收膜滚筒的2倍时,这样推膜效果最好。
3.2 集膜滚筒机构
奶牛适宜的环境温度通常为10~20 ℃,当环境温度达到30 ℃时奶牛便会出现明显的应激反应。盛夏高温季节,气候炎热,空气潮湿,很容易造成奶牛热应激。奶牛的散热能力与外界温度、湿度高低有很大的关系。当环境温度增加时,奶牛所处环境的温度与其体温的差异减小,为散发体热,奶牛对蒸发散热的依赖增加。然而盛夏时节温度高、湿度大,较高的相对湿度降低了蒸发散热的效力,奶牛不能消除多余的体热,体温升高。大量的体热在寒冷季节对高产奶牛的生产有益,但夏季期间大量体热会诱发热应激,对奶牛造成严重危害。
集膜滚筒机构由集膜滚筒外侧板、卷膜器、滚筒1、滚筒2、防滑机构等机构组成,如图10所示。

图9 反向推膜机构Fig.9 Structure of reverse push film device
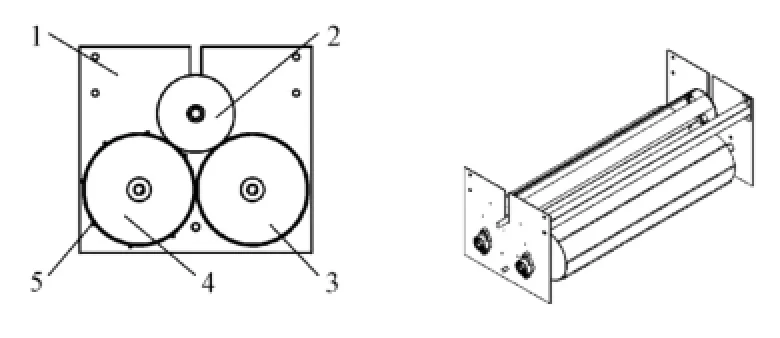
图10 集膜滚筒机构简图Fig.10 Structure diagram of collecting film roller
地轮行走时传动滚筒1和滚筒2,使其转动并带着与其相切卷膜器转动,从而达到卷膜效果。防滑机构作用是在根茬进入时,防止滚筒打滑,卷膜器不转动。
卷膜器由左轴套、右轴套和叶片等机构组成,如图11所示。叶片通过孔隙配合到左右轴套上,左右轴套通过与轴承配合后固定在轴承座上,在滚筒带动下进行转动收膜,收膜结束后将两边的轴套与叶片分离,分离后叶片自行散落,膜直接可以从叶片中拿出,完成收膜、卸膜过程。

图11 卷膜器结构图Fig.11 Structure diagram of voluming film device
4 结论以及改进后的样机
根据以上分析和实验,在工厂中做出样机并进行室内试验,如图12所示。
由于大田作物种植季节限制,全膜双垄沟地膜捡拾机样机于2015年在武威兴旺农机制造有限公司工厂内进行室内试验。该样机工作幅宽1.1 m,作业速度分别为3.6、5.4 km·h-1,得到作业生产率0.4~0.6 hm2·h-1。ME300拖拉机作为牵引动力,从田间人工捡拾10 kg残膜和玉米根茬混合物进行试验,其混合比例大约为9∶1。地膜捡拾率的计算公式为:

式中,S为捡拾率;ms为拾膜机构捡拾的地膜质量;mw为拾膜机构未捡拾的地膜质量。由此可得出地膜捡拾率为90%。
在实验过程,当遇到根茬或小石头等杂物时,收膜机构都能将其收集,没有出现卡死不能卷膜现象,样机在作业过程中没有因为任何故障而停止作业,因此其使用可靠性基本能达到98%。该机具操作简单,工作可靠,生产效率高,制造成本低,适应性强,为机械化回收残膜创造了良好的作业条件,提高了残膜回收率。
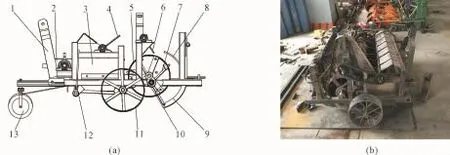
图1 全膜双垄沟残膜捡拾机结构简图(a)和样机图(b)Fig.1 The structure and prototype diagram of the whole film picking machine for double furrows

图12 改进后样机图与室内试验图Fig.12 Diagram of the improved prototype machine and indoor test
[1]杨祁峰,刘广才,熊春蓉,等.旱地玉米全膜双垄沟播技术的水分高效利用机理研究[J].农业现代化研究,2010,31(1):113-116.
[2]刘晓伟,何宝林,郭天文.全膜双垄沟不同覆膜时期对玉米土壤水分和产量的影响[J].核农学报,2012,26(3):602-609.
[3]黄高宝,方彦杰,李玲玲,等.旱地全膜双垄沟播玉米高效用水机制研究[J].干旱地区农业研究,2010,(6):116-121.
[4]李来祥,刘广才,杨祁峰,等.甘肃省旱地全膜双垄沟播技术研究与应用进展[J].干旱地区农业研究,2009,27(1):114-115.
[5]张雷,牛芬菊,李小燕,等.旱地全膜双垄沟播秋覆膜对玉米产量和水分利用率的影响[J].中国农学通报,2010,26(22):142-145.
[6]赵武云,戴飞,杨杰,等.玉米全膜双垄沟直插式精量穴播机设计与试验[J].农业机械学报,2013,44(11):91-97.
[7]王波,韩正晟,王松林,等.旱地全膜双垄沟残膜捡拾机的设计[J].农机化研究,2015,7(7):109-112.
[8]张东兴.残膜回收机的设计[J].中国农业大学学报,1999,4(6):41-43.
[9]李刚,张林海,付宇,等.曲柄摇杆式残地膜捡拾机构研究[J].农业机械学报,2014,45(11):63-67.
[10]杨树森,沈美容,林素元.弹齿式收膜机工作部件的研究[J].农业工程学报,1988,4(2):17-25.
[11]谢建华,侯书林,付宇,等.残膜回收机弹齿式拾膜机构运动分析与试验[J].农业机械学报,2014,45(10):94-99.
[12]王文明,王春光.弹齿滚筒式捡拾装置参数分析与仿真[J].农业机械学报,2012,43(10):82-89.
[13]Joseph E,Shigley CR,Mischke.Mechanicai Engineering Design.English Version(6 edition)[M].Beijing:Mechanical Industry Press,2002.
[14]Robert L Mott.Machine Elements in Mechanical Design.English Version(3 edition)[M].Beijing:Mechanical Industry Press,2003.
[15]杨丽,刘佳,张东兴,等.棉花苗期地膜回收机设计与试验[J].农业机械学报,2010,41(增刊):73-77.
Design of the film picking machine for double furrows
WU Yi-fei1,DAIFei1,ZHAOWu-yun1,WU Zheng-wen2,LIYong1
(1.College of Engineering,Gansu Agricultural University,Lanzhou,Gansu 730070,China;2.Xingwang Agricultural Machinery Manufacturing Co.,Wuwei,Gansu 733000,China)
In order to solve the problem of plastic film pollution,through the research and reference for the film picking machine at home and abroad,developed the film packingmachine for whole double furrows.Using the Solid Works motion function simulated the movement track of the elastic claw M point and the linear velocity of X direction,obtained that the rotation rate was80 r·min-1for the film roller.Through the design and calculation and considered other factors obtained the soil penetration angle was25°.Finally carried out the improvement and potimization for the key parts of the prototype machine.The experiments showed that:The prototype working productivity was 0.4~0.6 hm2·h-1,picking plastic film rate was 90%,and the using reliability was 98%,with high work efficiency,low manufacturing cost and strong adaptability.
plastic film picking machine;whole film for double furrows;design;optimization
S225.2+3
A
1000-7601(2016)06-0292-05
10.7606/j.issn.1000-7601.2016.06.44
2015-10-27
农业部公益性行业(农业)科研专项经费项目(201503105);甘肃省科技重大专项计划项目(143NKDJ018)
吴一非(1991—),男,江苏泰州人,硕士研究生,研究方向为农业工程技术与装备。E-mail:245049173@qq.com。
赵武云(1966—),男,甘肃兰州人,教授,博士,主要从事农业工程技术与装备。E-mail:zhaowy@gsau.edu.cn。
猜你喜欢
林业机械与木工设备(2022年2期)2022-03-08
农业机械学报(2020年10期)2020-10-29
机械工程师(2020年3期)2020-03-27
草地学报(2018年2期)2018-07-28
西北农林科技大学学报(自然科学版)(2018年6期)2018-07-23
农机化研究(2017年4期)2017-12-16
现代农业(2016年6期)2016-02-28
现代农业(2016年6期)2016-02-28
现代农业(2016年5期)2016-02-28
现代农业(2016年5期)2016-02-28
