
基于球形截断协方差矩阵的极化SAR分布式目标稳健定标方法
2016-02-13 07:13张晶晶洪
雷达学报 2016年6期
张晶晶洪 文*尹 嫱
①(中国科学院电子学研究所 北京 100190)
②(微波成像技术国家级重点实验室 北京 100190)
③(中国科学院大学 北京 100049)
④(北京化工大学信息科学与技术学院 北京 10029)
基于球形截断协方差矩阵的极化SAR分布式目标稳健定标方法
张晶晶①②③洪 文*①②③尹 嫱④
①(中国科学院电子学研究所 北京 100190)
②(微波成像技术国家级重点实验室 北京 100190)
③(中国科学院大学 北京 100049)
④(北京化工大学信息科学与技术学院 北京 10029)
常规的基于分布式目标的定标算法通过假设协方差矩阵满足特定形式,并用样本协方差矩阵来估计失真参数。然而,样本协方差矩阵并非稳定的协方差矩阵估计子。尤其是当场景中包含不满足定标算法要求的目标时,样本协方差矩阵会偏离理想形式,以致失真参数估计精确度下降。球形截断协方差矩阵方法能够有效地抑制离群样本对协方差矩阵估计的影响,该文将其引入到极化SAR的定标中,并对其可行性进行了理论分析。最后,利用机载全极化SAR数据,验证了该方法能够有效地降低失真参数估计的不确定度,从而提高失真参数估计的稳健性。
合成孔径雷达;极化;定标;球形截断协方差矩阵
1 引言
全极化SAR通过交替发射一组正交的极化波,并同时接收来自这两个极化通道的回波来测量目标完整的极化信息。为了提取正确的目标极化信息和保障极化SAR测量的可重复性,需要对极化SAR数据定标。
由于不需要额外的布置人造目标,基于分布式目标的定标方法[1-6]被普遍地用于估计串扰和交叉极化通道不平衡。这类定标算法一般用观测的目标协方差矩阵来估计失真参数。由于这些失真参数随距离向变化,所以实践中一般都用等斜距的像素来估计观测的目标的协方差矩阵[4,7]。然而实际应用定标算法时,均要求所用到的分布式目标满足一定假设。简单地用同一距离门处的像素来估计观测的目标协方差矩阵难免会包含不满足假设的目标,例如地形起伏较大的地物或不含极化信息的饱和像素等。为了获得更稳定的失真参数估计,需要滤除不满足定标算法假设的目标(以下简称这种目标为离群目标)。为此,本文采用截断协方差矩阵的方法来剔除离群目标。
全文安排如下:第2节介绍了基于分布式目标的极化SAR定标算法和球形截断实高斯分布的基础理论。在第3节中,我们先将球形截断方法推广到圆对称复高斯分布的情况,并论证了将球形截断协方差矩阵用于极化定标的可行性。然后,我们阐述了将球形截断方法用于极化定标的具体实现步骤。第4节给出了实际机载SAR数据的实验结果。最后在第5节给出结论。
2 背景知识
2.1 基于分布式目标的极化定标算法
线性全极化SAR系统测量模型可以表示为[1,5]:
其中,O和S分别为目标散射矩阵的测量值和实际值,R和T分别表示SAR系统接收端和发射端的失真。
定义中间变量
其中,u,v,w,z表示极化通道间的串扰;α和k分别表示交叉极化通道不平衡和同极化通道不平衡;Y表示VV通道的增益和相位延迟。利用式(2),式(1)可以写成矢量形式:

通过引入下列矩阵函数

我们可以将式(3)简写为:

基于分布式目标的定标算法要求观测数据中包含能够用来估计失真参数的冗余信息。为此,通常假设目标满足:(1)互易性,即有(2)同极化和交叉极化通道不相关[3](或目标满足方位对称性[1])。对于后向散射SAR来说,分布式目标都满足互易性[8]。然而,并非所有的分布式目标都满足方位对称性。本文假设待定标的分布式目标满足假设(2),至于如何保证该假设成立,不在本文讨论范围之内,感兴趣的读者可以参考文献[9]。
由式(5)可得,观测散射矢量的协方差矩阵为:

完整的定标,一般还需要利用人造目标(例如三面角反射器)来估计Y和k。本文只讨论利用分布式目标得到部分标定的散射矢量至于如何估计Y和k并非本文重点,感兴趣的读者可以参考文献[1]。
2.2 球形截断实高斯分布及其协方差矩阵


3 基于球形截断协方差矩阵的极化SAR定标方法
由于理论的协方差矩阵未知,为了构造定标方程,我们用样本协方差矩阵来估计。为了保证式(6)成立,用于估计样本协方差矩阵的所有像素所经历的失真必须相同。对于窄波束SAR系统来说,可以假设系统失真只随距离向变化而不随方位向变化[3]。因此,在实践中,对于每个距离门,一般选取与之等斜距的所有像素(即1条方位线)或者与当前距离门相邻的若干条方位线中的所有像素来估计样本协方差矩阵。需要注意,由于失真参数随距离向变化,定标过程中需要单独处理每个距离门。后续讨论中,除非特殊指明,讨论范围都限定在当前距离门处。
假设在某个待考察距离门处有L个经历了相同失真的像素,它们对应的散射矢量的观测值与

于是样本协方差矩阵的实际值和测量值分别为:

3.1 分布式目标的球形截断协方差矩阵
对于分布式目标,其统计特性可以用零均值圆对称复高斯分布来描述[11]。圆对称复高斯分布的定义要求协方差矩阵非奇异,而为奇异阵,所以不能直接定义散射矢量的分布。从而,我们无法直接定义其球形截断协方差矩阵。为此,我们引入矢量其中

仿照实高斯分布的情况,我们定义复数空间的“球”

以及s在内截断的概率密度函数

利用式(25)可以定义复圆高斯矢量s的球形截断分布的1阶、2阶原点矩

3.2 基于球形截断协方差矩阵的定标方法

从前面的讨论可知v1,v2和v3也是的特征矢量。假设v1,v2和v3分别对应特征值则利用Hermitian矩阵的谱表示可以得到

从式(39)可以看出,我们仍需给出选择合适的阈值作球半径的方法。由于在绝对定标工作尚未完成前|Y|是未知的,的具体数值并不具备明确的物理意义。为了避免直接用具体的阈值做半径,本文采用的经验累积分布的分位数来间接地进行截断操作。定义的经验累积分布如下
假设待估计的参数为x(x可以是u,v,w,z和α中的任意一个),并记此时x的估计值为(β)。为了评价失真参数估计的稳健性,我们可以用Bootstrap的方法[13]来估计失真参数的标准误差SE[(β)]。当β增大时,ηβ会变小,截断样本协方差矩阵也会逐渐趋于稳定。相应地,标准误差SE[(β)]也会随着β的增大而渐进地趋于零。然而,当β取值过大时,阈值ηβ会过小,这一方面会造成样本数量不足,另一方面会导致截取出的样本集中信噪比低的像素的比例增多。这两方面因素都会导致定标算法的精度的下降[3]。作为折衷,我们定义最优的β如下:

当β=βopt时,我们既有效地降低失真参数估计的不确定度,又保障定标算法的精度。如果将此时的失真参数估计用于极化定标,就能得到比较可靠的定标结果。注意,为了防止样本过小,我们人为地限定了
综上,我们将基于球形截断协方差矩阵的定标算法流程总结在表 1中。

表1 基于球形截断协方差矩阵的极化定标算法流程Tab. 1 Algorithm for Polarimetric Calibration Using Spherically Truncated Covariance Matrix
4 实验结果及分析
图1为中国科学院电子学研究所的机载P波段全极化SAR系统于2010年11月采集的山西长治地区的全极化图像。该图像尺寸为2028×1024,距离向和方位向分辨率都为1.2 m。场景内容包括自然地物、人造建筑物以及若干人造点目标。平台移动方向为从左到右,近距为图像下侧。本文利用该数据来验证所提方法。

图1 定标后的P波段极化SAR的Pauli伪彩图Fig. 1 Calibrated P-band Polarimetric image rendered in Pauli basis
去除同极化交叉极化相关系数大于0.5的像素和总功率最大的10%的像素,我们得到如图2所示的全局掩模。本文将仅以该掩模筛选样本的定标方法用于对照,后文简称其为常规方法。在全局掩模的基础上,我们再利用截断协方差矩阵的方法筛选样本。取SEtol=0.0165并利用表1中的算法估计βopt。图3给出βopt的估计结果,从中可以看出,只有少部分距离门处βopt为0,这表明在大部分距离门处,截断协方差矩阵方法都可以降低失真参数的标准误差。图4比较了常规方法和本文方法估计的失真参数结果。从图4可以看出,常规方法和本文方法的差异比较显著。然而,仅凭图4并不能判断两种方法孰优孰劣。图5给出了这两种方法得到的失真参数估计的标准误差。从图5则可以明显的看出本文方法所估计的失真参数标准误差更小。因此,本文方法提高了极化定标的稳健性。注意,本文只给出了串扰u的结果,其它串扰参数的实验结果与之类似。

图2 全局掩模Fig. 2 Global Mask

图3 不同距离门处的βopt值Fig. 3 Variation ofβoptversus range
最后,为了验证定标方法的精度,我们在图6和图7给出了常规方法和本文方法定标完成后的剩余极化失真的估计值及相应的标准误差。从图6可以看出,两种方法,定标完的剩余失真都比较小。然而,从图7可以看出,本文方法剩余失真的标准误差更小。另外,注意到图5和图7很差异甚小,这说明无论选用哪种方法得到的失真参数估计来定标,都不能减小失真参数的不确定度。因此,为了降低失真参数的不确定度,我们必须在估计失真参数时对样本进行筛选。

图4 常规方法和本文方法所得失真参数估计的比较Fig. 4 Comparison of distortion estimates obtained by applying conventional and proposed method to uncalibrated data
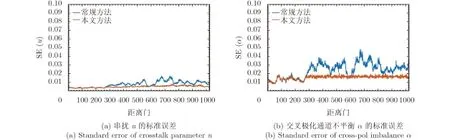
图5 常规方法和本文方法所得失真参数估计的标准误差的比较Fig. 5 Comparison of the standard errors of the distortion estimates obtained by applying conventional and proposed method to uncalibrated data

图6 常规方法和本文方法定标后的剩余失真参数估计的比较Fig. 6 Comparison of the residual distortion estimates obtained by applying conventional and proposed method to calibrated data

图7 常规方法和本文方法定标后的剩余失真参数估计的标准误差的比较Fig. 7 Comparison of the standard errors of the residual distortion estimates obtained by applying conventional and proposed method to calibrated data
5 总结
本文在传统极化定标算法的实践中引入了球形截断协方差矩阵,并从理论上证明了球形截断不会导致极化SAR定标所依赖的假设不成立。实际机载极化SAR的定标实验结果表明,利用球形截断协方差矩阵估计的失真参数有效地降低了失真参数估计的标准误差。因此,基于球形截断协方差矩阵的极化SAR定标方法是一个稳健的定标方法。
附录A
本节给出了用观测的平均协方差矩阵来估计失真参数的具体细节[6]。注意,与文献[6]不同,本文沿用文献[4]中失真参数的定义及符号。令


注意,这里为了简化记号,Cij表示矩阵的第i行、第j列的元素。联立式(A-3)和式(A-5)可以建立以下的非线性方程组:

利用Newton迭代法求解式(A-6),即可得串扰的估计值。利用式(A-4)矫正串扰,可以得到W。这样,由式(A-2)可得

感兴趣的读者可能注意到,除了失真参数的定义有区别外,这里给出的算法细节与原始文献[6]中算法仍然有差别。在文献[6]中,串扰的估计和通道不平衡的估计杂糅在一起,迭代过程中的参数更新也很复杂。并且,文献[6]的作者虽然声称需要更新α,但是并未给出其更新的方法。本文将串扰的估计和通道不平衡的估计分成两个独立的步骤,这将极大地简化算法实现。另外,文献[6]中的方法估计得到的部分失真参数并不与其定义相对应(差了一个比例因子)[14],而本文的方法所估计的失真参数直接对应了其定义。
附录B


[1]van Zyl J J. Calibration of polarimetric radar images using only image parameters and trihedral corner reflector responses[J].IEEE Transactions on Geoscience and Remote Sensing, 1990, 28(3): 337-348.
[2]Freeman A, van Zyl J J, Klein J D,et al.. Calibration of Stokes and scattering matrix format polarimetric SAR data[J].IEEE Transactions on Geoscience and Remote Sensing, 1992, 30(3): 531-539.
[3]Klein J D. Calibration of complex polarimetric SAR imagery using backscatter correlations[J].IEEE Transactions on Aerospace and Electronic Systems, 1992, 28(1): 183-194.
[4]Quegan S. A unified algorithm for phase and cross-talk calibration of polarimetric data-theory and observations[J].IEEE Transactions on Geoscience and Remote Sensing, 1994, 32(1): 89-99.
[5]Ainsworth T L, Ferro-Famil L, and Lee J S. Orientation angle preserving a posteriori polarimetric SAR calibration[J].IEEE Transactions on Geoscience and Remote Sensing, 2006, 44(4): 994-1003.
[6]Zhang H, Lu W, Zhang B,et al.. Improvement of polarimetric SAR calibration based on the ainsworth algorithm for Chinese airborne PolSAR data[J].IEEE Geoscience and Remote Sensing Letters, 2013, 10(4): 898-902.
[7]van Zyl J J. Synthetic Aperture Radar Polarimetry[M]. John Wiley & Sons, 2011, Ch. 4.
[8]Ulaby F T and Elachi C. Radar Polarimetry for Geoscience Applications[M]. Norwood, MA: Artech House, Inc., 1990.
[9]Kimura H, Mizuno T, Papathanassiou K P,et al.. Improvement of polarimetric SAR calibration based on the Quegan algorithm[C]. 2004 IEEE International Geoscience and Remote Sensing Symposium, IGARSS’04, Anchorage, AK, USA, 2004, 1: 187.
[10]Palombi F, Toti S, and Filippin R. Numerical reconstruction of the covariance matrix of a spherically truncated multinormal distribution[J].ArXiv e-prints, 2012. [11]Goodman N R. Statistical analysis based on a certain multivariate complex Gaussian distribution (An Introduction)[J].Annals of Mathematics and Statistics, 1963: 152-177.
[12]van Zyl J J. Application of Cloude’s target decomposition theorem to polarimetric imaging radar data[C]. Proceedings of SPIE Radar Polarimetry, San Diego, CA, USA, 1992.
[13]Zhang J J and Hong W. Bootstrap resampling for distributed-target-based polarimetric calibration and validation without ground truth[C]. Presented at the CEOS SAR CAL/VAL Workshop, Tokyo, Japan, 2016.
[14]Xing S Q, Dai D H, Liu J,et al.. Comment on “orientation angle preservingA Posterioripolarimetric SAR calibration”[J].IEEE Transactions on Geoscience and Remote Sensing, 2012, 50(6): 2417-2419.
[15]Papoulis A. Probability, Random Variables, and Stochastic processes[M]. in Physics Today, 2002, Ch. 7.

张晶晶(1986-),男,博士研究生,研究方向为极化/混合极化SAR系统设计与定标、SAR成像算法、极化/极化干涉SAR数据处理及应用。
E-mail: zhang.jingjing.1986@outlook. com

洪 文(1968-),女,研究员,博士生导师,研究方向为雷达信号处理理论、SAR成像算法、极化/极化干涉SAR数据处理及应用、压缩感知SAR成像、圆迹SAR成像等。
E-mail: whong@mail.ie.ac.cn

尹 嫱(1982-),女,博士,研究方向为极化干涉SAR处理及应用、散射建模与土壤湿度反演。
E-mail: yinq@mail.buct.edu.cn
Robust Distributed-target-based Calibration Method for Polarimetric SAR Using Spherically Truncated Covariance Matrix
Zhang Jingjing①②③Hong Wen①②③Yin Qiang④
①(Institute of Electronics,Chinese Academy of Sciences,Beijing100190,China)
②(National Key Laboratory of Science and Technology on Microwave Imaging,Beijing100190,China)
③(University of Chinese Academy of Sciences,Beijing100049,China)
④(Beijing University of Chemical Technology,Beijing10029,China)
Conventional distributed-target-based polarimetric calibration algorithms estimate polarimetric distortions by assuming that the measured spatially averaged covariance matrix takes a specific form. However, when the underlying surface contains targets that do not satisfy the assumptions employed by those algorithms, the averaged covariance matrix may deviate from the desired form. As a result, poor estimates of distortion parameters may yield. It is known that spherically truncated covariance matrix is robust to outliers. Thus, we introduce it to the polarimetric SAR calibration routine. Experiment results on the airborne SAR data confirm that this method can effectively reduce the uncertainty of distortion estimates, hence improve the robustness of the calibration.
SAR; Polarimetric; Calibration; Spherically truncated covariance matrix
TN958; TN957.52
A
2095-283X(2016)06-0701-10
10.12000/JR16138
张晶晶, 洪文, 尹嫱. 基于球形截断协方差矩阵的极化SAR分布式目标稳健定标方法[J]. 雷达学报, 2016, 5(6): 701-710.
10.12000/JR16138.
Reference format:Zhang Jingjing, Hong Wen, and Yin Qiang. Robust distributed-target-based calibration method for polarimetric SAR using spherically truncated covariance matrix[J].Journal of Radars, 2016, 5(6): 701-710. DOI: 10.12000/JR16138.
2016-12-02;改回日期:2016-12-20
*通信作者:洪文 whong@mail.ie.ac.cn
国家自然科学基金重点项目(61430118)
Foundation Item: The National Natural Science Foundation of China (61430118)
猜你喜欢
纺织标准与质量(2022年2期)2022-07-12
哈尔滨工业大学学报(2022年5期)2022-04-19
今日农业(2021年19期)2022-01-12
消费电子(2021年7期)2021-08-10
北京航空航天大学学报(2020年10期)2020-11-14
计算机应用与软件(2019年2期)2019-04-01
经济研究导刊(2018年19期)2018-07-24
雷达学报(2018年3期)2018-07-18
雷达学报(2017年3期)2018-01-19
航天返回与遥感(2017年2期)2017-05-24
