基于活动轮廓与模糊型支持向量机的车辆分类算法
2016-01-29 05:56
吉首大学学报(自然科学版) 2015年2期
关键词:支持向量机
申 瑛1,杨焕志2,张振彬1,曾庆欢2李 平1,陈炳权1,张榜英1
(1.吉首大学信息科学与工程学院 湖南 吉首 416000;2.吉首大学
物理与机电工程学院 湖南 吉首 416000)
基于活动轮廓与模糊型支持向量机的车辆分类算法
申瑛1,杨焕志2,张振彬1,曾庆欢2李平1,陈炳权1,张榜英1
(1.吉首大学信息科学与工程学院 湖南 吉首 416000;2.吉首大学
物理与机电工程学院 湖南 吉首 416000)
摘要:视频监控系统是智能交通监控系统的重要组成部分.通过监视区域车辆视频图像的预处理、检测,完成车辆的实时分类,并根据分类结果实时确定交通灯控制系统红黄绿灯的放行时间.采用活动轮廓跟踪模型对运动车辆视频图像实现检测,由模糊型支持向量机方法实现运动车辆的分类.Matlab软件仿真结果表明,大中小型车辆的平均正确识别率达96.49%,提高了车辆通行效率.
关键词:差分图像;活动轮廊模型;模糊型;支持向量机
智能交通视频监控系统实时采集视频区域中的车辆视频图像,并通过一系列视频图像处理方法对车辆视频图像进行处理[1],完成车辆实时检测与分类,为智能交通灯控制系统的实时控制提供依据,并根据各支路车流量大小实时改变红黄绿灯放行时间,大大提高十字路口的车辆通行效率.针对目前车辆识别率不高的缺陷[2],笔者设计了如图1所示的车辆检测与分类系统结构.首先对采集的视频图像进行灰度化[3]预处理,并将灰度化后的车辆视频图像与背景图像进行背景差分处理[4],然后对差分图像进行检测与分类等相关图像处理[5-7].该车辆检测算法建立在活动轮廓模型之上,并采用模糊型支持向量机方法对车辆进行分类.
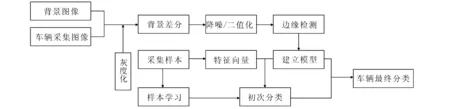
图1 系统总体结构
1视频图像预处理
1.1 视频图像的灰度化
通常情况下,智能交通视频监控系统通过摄像头采集的视频图像均为彩色图像,该彩色图像虽然包含了大量的有用信息,但是会耗费较大存储空间.考虑将彩色图像转化为灰度图像(该灰度图像实质是R,G,B个分量相同的特殊彩色图像),于是一个像素点的颜色变化范围由255×255降至255,为后续的图像处理减少了计算量.YUV颜色空间中Y分量定义为亮度,并由该值反映亮度等级.由RGB和YUV颜色空间的变化关系,建立了亮度Y与R,G,B等3种颜色分量的对应关系Y=0.3R+0.59G+0.11B,最终以这个亮度值定义该图像的灰度值.
1.2 视频图像背景差分算法
当图像灰度化后,采用背景差分方法来分割视频图像.背景差分方法是将同一景物在不同时刻采集的2帧视频图像进行相减,或将同一景物在不同波段的视频图像进行相减,从而得出2帧图像的差分图像.该算法较帧差法[8]能更好地识别和提取运动目标.
设有2帧不相同的视频图像,其中一帧为P1(x,y),另一帧为P2(x,y).若以P2(x,y)为背景图像,则按照下列方法得到背景差分图像:


N(x,y)=|M1(x,y)-M2(x,y)|.
其中:M1(x,y) 是以像素点P1(x,y)为中心的灰度值之和;M2(x,y) 是以像素点P2(x,y)为中心的灰度值之和;N(x,y)是P1(x,y)与P2(x,y)这2幅图像的灰度差额,即差分图像.利用背景差分算法得到的交通监控视频图像中的运动目标车辆分割结果如图2所示.

图2 背景差分法结果前后对比
得到背景差分图像之后,再将差分图像进行去噪预处理[9],选择合适的灰度值阈值,凡是差分图像的像素灰度值大于该阈值则设成255,小于该阈值则设成 0,于是得到二值化图像,该二值化图像更能凸显运动车辆的轮廓.
2视频图像运动车辆检测算法
根据基于活动轮廓的跟踪算法原理[10],采用Canny算子对视频图像进行边缘检测,并对视频中的每辆车辆建立轮廓模型,改变图像目标车辆的封闭曲线,就可以得到一个取代该目标车辆的活动轮廓.该活动轮廓具有一定的弹性,是由运动车辆上一些可以自由活动的连接点组成,在图像检测过程中,随目标车辆的变化而变化,可以适应不同的目标车辆,且在变化过程中会自动寻找适应自身变化的能量,从而得到自适应的最小能量.该模型从最开始的状态慢慢向目标车辆外轮廓靠近,最终与车辆外轮廓进行连续的平滑接触,在这个接触过程中,图像的能量分为2个部分:内部能量保证活动轮廓的连续与平滑性,从而取代车辆外轮廓;外部能量保证活动轮廓的整体形状,从而迅速靠拢车辆外轮廓.
2.1 活动轮廓线的定义
活动轮廓模型包含图像内部能量和外部能量2个部分,它是一条可控的连续性平滑曲线,其能量函数定义为

其中:轮廓曲线上的点用向量m(s)=(x(s),y(s))表示,x(s)和y(s)分别表示图像中活动轮廓模型像素点的坐标位置;描述车辆外轮廓形状边界的自变量s∈[0,1].
Ei(m(s))表示图像中活动轮廓的内部能量,定义为
Ei(m(s))=(|m1(s)|2·α(s)+|m2(s)|2·β(s))/2.
其中:活动轮廓线的一阶项m1(s)表示其连续性;二阶项m2(s)表示其弯曲程度;α,β分别为该轮廓线一阶项m1(s)和二阶项m2(s)的权重系数,通过调整该权重系数α,β,就可以控制活动轮廓线的相关弹性形变.
Eo(m(s))代表图像力的能量项,一般根据图像灰度的梯度信息设计而成,表达式为
Eo(m(s))=γ|I(x,y)|2.
其中:I(x,y)表示图像中由各点灰度值组成的灰度矩阵;为图像的梯度算子;γ为图像的权重系数.
Ec(m(s))表示外部能量项,一般需要根据实际情况来定义,该能量项保证了驱动活动轮廓线迅速向车辆的真实轮廓靠近.
2.2 活动轮廊模型的构建
活动轮廊模型的构建如图3所示.其详细构建过程描述如下:
(1)从预处理后的差分图像中得到视频图像中的运动目标车辆.
(2)求出视频图像中运动目标车辆区域的中心点(xi,yi)和最大半径rimax.
(3)以区域中心点(xi,yi) 为中心,以长度半径r=rimax+2的圆形区域为有效检测区域.
(4)以区域中心点(xi,yi) 为中心,构建N条相同间隔的射线Li(i=0,1,2,…,N),其中每相邻2条射线间隔角度为2π/N,检测的有效长度半径为r.
(5)由该有效圆形检测区域的射线和车辆外轮廓形状线得到交叉点,最终构建出车辆轮廓模型.
Matlab软件仿真结果如图4,5所示.

图3 活动轮廓模型的形成

图4 背景差分法
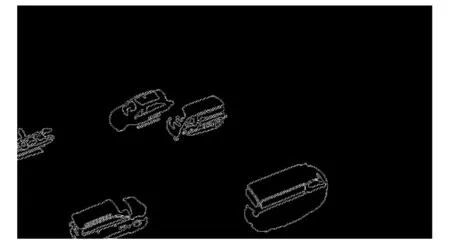
图5 车辆活动轮廓模型
3视频图像运动车辆分类算法
支持向量机[11]在解决有关车辆分类问题时,其车辆样本通过最优超平面划分成2种对立类型,然而在实际分类中,存在一些不能被划分到这2种类型的车辆样本.为了解决车辆样本与分类别之间存在的模糊关系,将数学领域内的模糊理论[12]运用到分类方案中,这种模糊型支持向量机方法可以有效提高车辆分类的效率.
3.1 模糊型支持向量机
模糊型支持向量机模型是在支持向量机基础上融合了模糊理论,在构造运动目标车辆的函数时,通过设置一个特征权系数,实现对不同车辆样本的分类.当车辆样本噪声较大时,该特征权系数可以提高车辆样本的有效性,大大提升分类效率及其准确性.
用一个特征集合来描述其不确定性.令目标车辆的集合为A,a是该集合中的一个任意元素.那么A上的特征集合B定义为B=(a,UA),a∈A,其中UA是关于集合A中的任意元素a的映射函数,该函数的取值范围为[0,1].
3.2 分类算法流程
车辆分类算法分为2个部分:模式部分和决策部分.模式部分统计车辆实际特征值,然后由车辆活动轮廓模型建立完整的样本库,并对车辆样本进行初步分类.为充分利用车辆样本,选取模糊型支持向量机的特征向量.决策部分由车辆样本建立完整的模糊型支持向量机分类器,根据已选取的特征向量做最后分类决策.具体流程如图6所示.

图6 分类流程
3.3 样本分类训练
车辆活动轮廓模型是分类的关键信息,先将已通过道路检测线的车辆进行分类,其余的车辆不作处理.将这些车辆与它对应的活动轮廓模型用相对比例的方框框出(图7第1行为车辆模型,第2行为车辆样本),然后提取出车辆样本,并将所得结果保存.

图7 模型与样本图像
提取车辆样本后开始训练模糊型支持向量机的分类,将车辆模型与样本相关的诸如长宽和、长宽比和区域面积作为该分类器的特征向量,调整好该分类器的各项参数,通过实时采集的车辆图像分析车辆模型与样本的特征向量,并对其进行初次分类.车辆类型分为小型车(即自行车与摩托车)、中型车(即出租车与私家车)、大型车(即客车、大货车、工地大型用车).比较车辆模型与车辆样本的特征向量(长、宽单位像素),从而得出最终分类结果(表1).

表1 车辆模型与车辆样本的特征向量
3.4 视频图像运动车辆分类仿真
完成了模糊型支持向量机分类器的训练工作后,再对新的车辆样本进行分类.车辆样本图像被该分类器读入(图8),其分类的结果如图9所示.
Matlab软件实验仿真结果表明,110辆大型车能识别出105辆,其正确识别率为95.45%,中型车675辆能识别出660辆,其正确识别率为97.92%,小型车230辆能识别出221辆,其正确识别率为96.09%,平均正确识别率达96.49%,取得了较为理想的效果,验证了模糊型支持向量机进行车辆分类的可行性和正确性.

图8 样本读入
图9 分类识别结果
4结语
基于活动轮廓模型的检测算法,利用变化形状的活动轮廓线对车辆差分图像进行检测,使其检测的精确度得到提高.该算法常被一些模式化的曲线形状所干扰,导致目标检测错误.采用模糊型支持向量机对视频图像中的运动目标车辆进行分类,模糊型支持向量机的分类策略降低了车辆样本噪声,并消除了无用的样本,使得分离的样本数量增多,提高了车辆的正确分类及识别效率.
参考文献:
[1] 陈炳权,刘宏立,孟凡斌.数字图像处理的现状及其发展方向[J].吉首大学学报:自然科学版,2009,30(1):63-70.
[2] 孙少林,马志强,汤伟.灰度图像二值化算法研究[J].价值工程,2010(5):142-143.
[3] 孟凡清.基于背景差分法与ORB算法的运动目标检测与跟踪算法研究[D].北京:北京印刷学院,2014.
[4] 杨晶晶.数字视频图像预处理算法的研究与实现[D].上海:复旦大学,2012.
[5] 曾俊.图像边缘检测技术及其应用研究[D].武汉:华中科技大学,2011.
[6] 刘驰.基于活动轮廓的图像分割算法研究[D].南京:南京理工大学,2014.
[7] 王爱平.视频目标跟踪技术研究[D].长沙:国防科技大学,2011.
[8] 赵济民.基于SVM的地磁车辆检测器车型分类方法研究[D].北京:北京交通大学,2014.
[9] 郭佳.基于光照不均匀图像的自适应二值化方法研究[D].武汉:武汉科技大学,2013.
[10] 王俊龙.基于支持向量机建模的非线性预测控制研究[D].北京:北京交通大学,2014.
[11] 徐淑琼.模糊支持向量机及其在场景图像处理中的应用研究[D].广州:广东工业大学,2013.
[12] 权佳成.基于模糊理论的图像分割算法的研究[D].重庆:重庆大学,2011.
(责任编辑陈炳权)
Algorithm of Vehicle Classification Based on Traffic Video Surveillance System
SHEN Ying1,YANG Huanzhi2,ZHANG Zhenbin1,ZENG Qinghuan2,
LI Ping1,CHEN Bingquan1,ZHANG Bangying1
(1.College of Information Science and Engineering,Jishou University,Jishou 416000,Hunan China;2.College of
Physics and Electromechanical Engineering,Jishou University,Jishou 416000,Hunan China)
Abstract:Video surveillance system is a component of intelligent transportation system.Through preprocessing and detecting the video image of vehicles in monitoring area,and real-time classification,the release time of traffic lights can be confirmed in real time according to the size of the vehicle flow.By using the method of the active contour tracking model and fuzzy support vector machine,the intelligent traffic video surveillance system provides real-time detection and classification of vehicles.Matlab simulation results show that the average correct recognition rate of large,medium and small sized vehicle is 8 9.8%,so the method can improve the efficiency of traffic.
Key words:difference image;active contour tracking model;fuzzy;support vector machine
通信作者:张榜英(1975—),男,湖南泸溪人,吉首大学信息科学与工程学院讲师,湖南大学博士生,主要从事智能控制与嵌入式系统研究.
基金项目:国家级大学生创新创业训练计划资助项目(201310531002);湖南省大学生研究性学习和创新性实验计划资助项目(201310531002);吉首大学大学生研究性学习与创新性实验计划资助项目(JSU-CX-2013-08)
收稿日期:2014-05-26
中图分类号:TP391.4
文献标志码:A
DOI:10.3969/j.issn.1007-2985.2015.02.012
文章编号:1007-2985(2015)02-0055-05
猜你喜欢
现代电子技术(2016年23期)2017-01-12
现代电子技术(2016年23期)2017-01-12
无线互联科技(2016年13期)2017-01-10
中国水运(2016年11期)2017-01-04
软件导刊(2016年11期)2016-12-22
电子技术与软件工程(2016年20期)2016-12-21
价值工程(2016年32期)2016-12-20
价值工程(2016年29期)2016-11-14
科学与财富(2016年28期)2016-10-14
考试周刊(2016年53期)2016-07-15