拖拉机自动转向控制系统的一种改造方案
2016-01-27 04:24:52张媛媛张双狮张家凡
武汉轻工大学学报 2015年4期
张媛媛,张双狮,张家凡
(武汉轻工大学 机械工程学院,湖北 武汉 430023)
拖拉机自动转向控制系统的一种改造方案
张媛媛,张双狮,张家凡
(武汉轻工大学 机械工程学院,湖北 武汉 430023)
摘要:拖拉机自动转向控制系统可实现拖拉机按规划路径行驶,是自动驾驶转向控制的基础。基于拖拉机现有液压系统,给出一种液压油路改造方案,论述在该方案基础上的自动转向控制系统基本构成和工作原理,并对该方案的发展与完善提出建议。
关键词:拖拉机;自动驾驶;液压系统;转向控制
1引言
中国作为农业大国,农业在国民经济中占有很重要的地位。随着农业现代化进程的不断深入和农村经济的不断发展,农业生产经营模式也不断进步,农业机械向着大功率、智能化、高效率、多功能、高安全和易操作等方向发展。拖拉机是农业生产中的主要动力机械,实现其自动驾驶作业,不仅可以提高农机作业的精准度,减少作业误差,并且提高农业生产的标准化程度,促进土地的高效利用,提高农业生产效率,降低成本,减轻驾驶人员的工作负荷,节约劳动力。拖拉机的自动导航驾驶综合了全球定位系统、地理信息系统、机电液控制技术、变量处理设备系统等技术, 自动转向控制系统是实现其自动驾驶的关键技术之一。
国内外的有关学者对自动转向技术进行了大量的研究。在国外,自动转向技术研究比较成熟,如Qiu H与Zhang Q设计了由液压阀、比例换向阀和转向控制器(ECU)等组成的拖拉机电液操控系统[1]。伊利诺伊大学香槟分校农业工程系张勤和John F.Reid与北海道大学的Noboru Noguchi开发的多传感器信息融合的组合系统包括机器视觉传感器、GPS和车轮转角传感器等,采用FPID控制算法实现了对前轮的自动转向控制。丹麦兽医和农业学院的Simon Blackmore等人采用AgroNav GT2000控制器通过串口采集RTK-GPS的定位信息,并采用AgroNav Plan插接AutoCAD实现路径规划,最终实现拖拉机的自动导航[2]。在国内,电动机控制方法比较常见,如张智刚等采用张紧带和同步齿形带将电动机转矩传递至方向盘转轴上,实现了插秧机的自动转向控制[3]。胡烁等采用小功率直流电动机驱动摩擦轮,与方向盘产生摩擦,实现插秧机的自动转向控制[4]。陈文良等通过加装全液压转向器、步进电机及其驱动器、电磁换向阀和液压连接部件,实现了拖拉机的自动转向[5]。吴晓鹏等通过加装电控比例液压阀、三位四通换向电磁阀、手动切换阀和转向控制单元以及液压管路使拖拉机实现自主转向[6]。
本方案基于拖拉机现有液压系统,选取基于流量伺服阀的电控液压动力转向改造方案,实现拖拉机的自动转向。本文论述了该液压改造方案的基本工作原理和基本组成部分,介绍各部分的主要功能,并对总体方案的发展与完善提出建议。
2自动转向控制系统的工作原理
2.1GPS定位系统工作原理
GPS定位采用基准站—移动站差分方式。GPS定位系统工作时,在已知坐标的固定点上架设一台GPS接收机(称基准站),通过GPS的定位数据和已知点坐标数据解算出差分数据(RTCM),再通过数据链将误差修正参数实时播发出去。用户端通过数据链接收修正参数并传给接收机,接收机修正参数后和实时定位数据进行修正解算,即可得到当前点坐标[7]。
2.2液压系统工作原理
本方案选取的电控液压转向系统与拖拉机原有全液压机械转向系统并联使用,其原理结构如图1所示。

1.方向盘 2.转向器 3.油管 4.转向油缸 5.前轮 6.三位四通电磁换向阀 7.比例阀 8.安全阀 9.油箱 10.液压转向泵图1 电控液压转向系统原理图
电控液压转向油路在原有转向油路的基础上并联安装集成液压阀(由比例阀、三位四通电磁换向阀和安全阀组成,如图1虚线框部分所示),实现车辆的自动转向。系统工作时,根据控制器指令,三位四通电磁换向阀实现油路的方向切换控制,达到控制前轮左右转向的效果;比例阀实现油路流量控制,达到控制转向速度快慢的效果。比例阀输入前端安装安全阀,即溢流阀,保证系统工作可靠度。
自动转向控制的原理是:发动机启动后,转向液压泵开始工作;控制器检测拖拉机前轮转向信息,发出控制指令,控制集成液压阀的开度和方向;液压油经过比例阀和电磁阀时改变方向和流量,进入转向油缸,油缸活塞在油压作用下移动实现拖拉机前轮向目标角度转向。
3自动转向控制系统的组成部分
该方案的拖拉机自动转向控制系统是集卫星接收、定位、控制于一体的综合性系统,主要由GNSS天线、高精度北斗/GNSS接收机、显示器、控制器、液压阀、角度传感器等部分组成。自动转向控制系统根据设备放置的场所可分为基站部分与拖拉机车载部分。基站部分主要包括接收机、发射电台、接收天线、电台发射天线、设备配套线缆等。车载部分安装布置如图2所示。
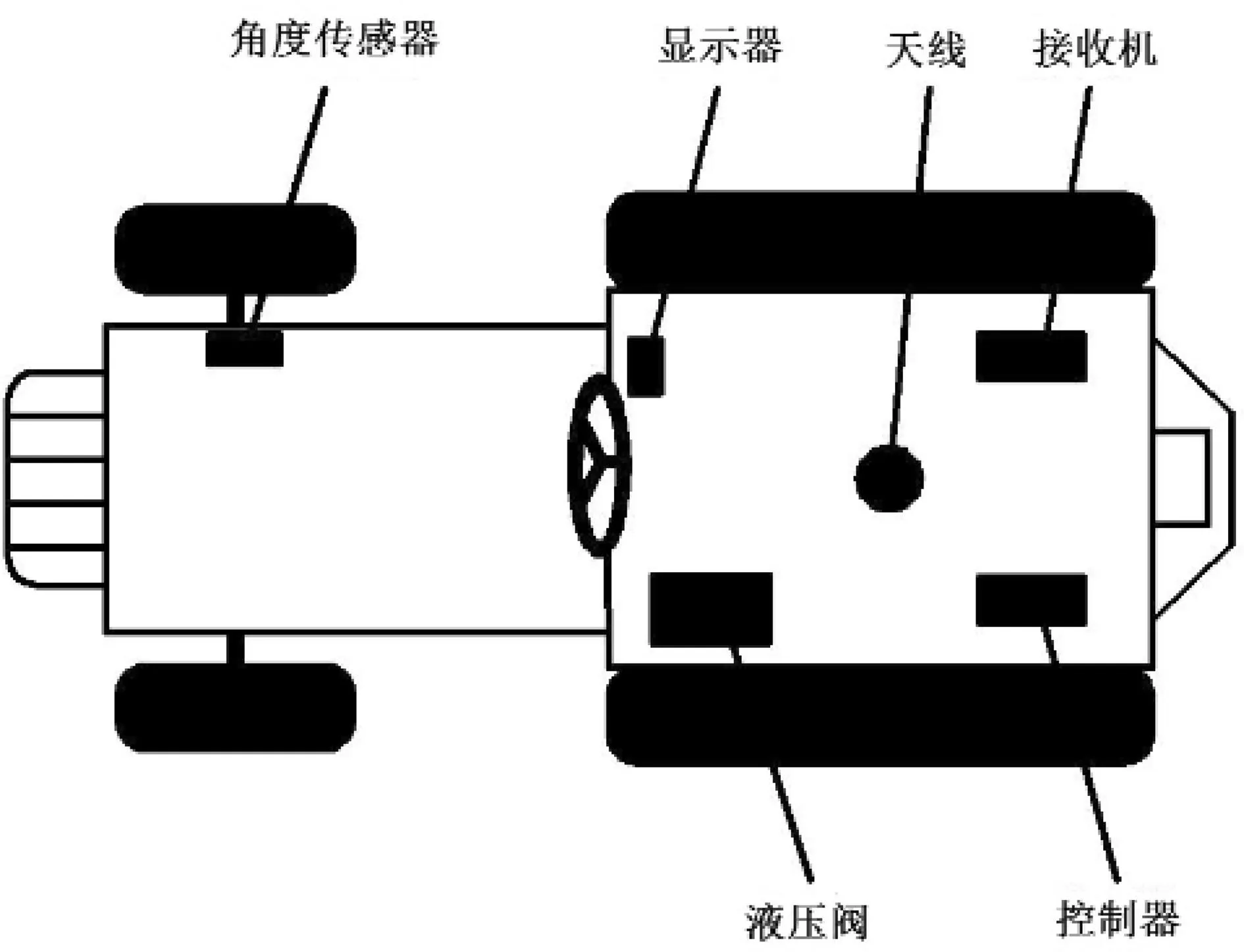
图2 硬件分布图
系统工作时, GNSS天线得到位置信号并通过接收机进行实时差分。控制器将差分所得的精准位置信息与用户通过显示器输入的车辆信息、工作路径等进行计算,将控制指令通过电信号传送至集成液压阀。换向阀和比例阀改变液压油流向和流量,控制转向油缸改变车辆转角。转角信息被角度传感器捕获并实时反馈至控制器,控制器重复上述过程使车辆按用户输入的路径自动控制车辆转向,如图3所示。
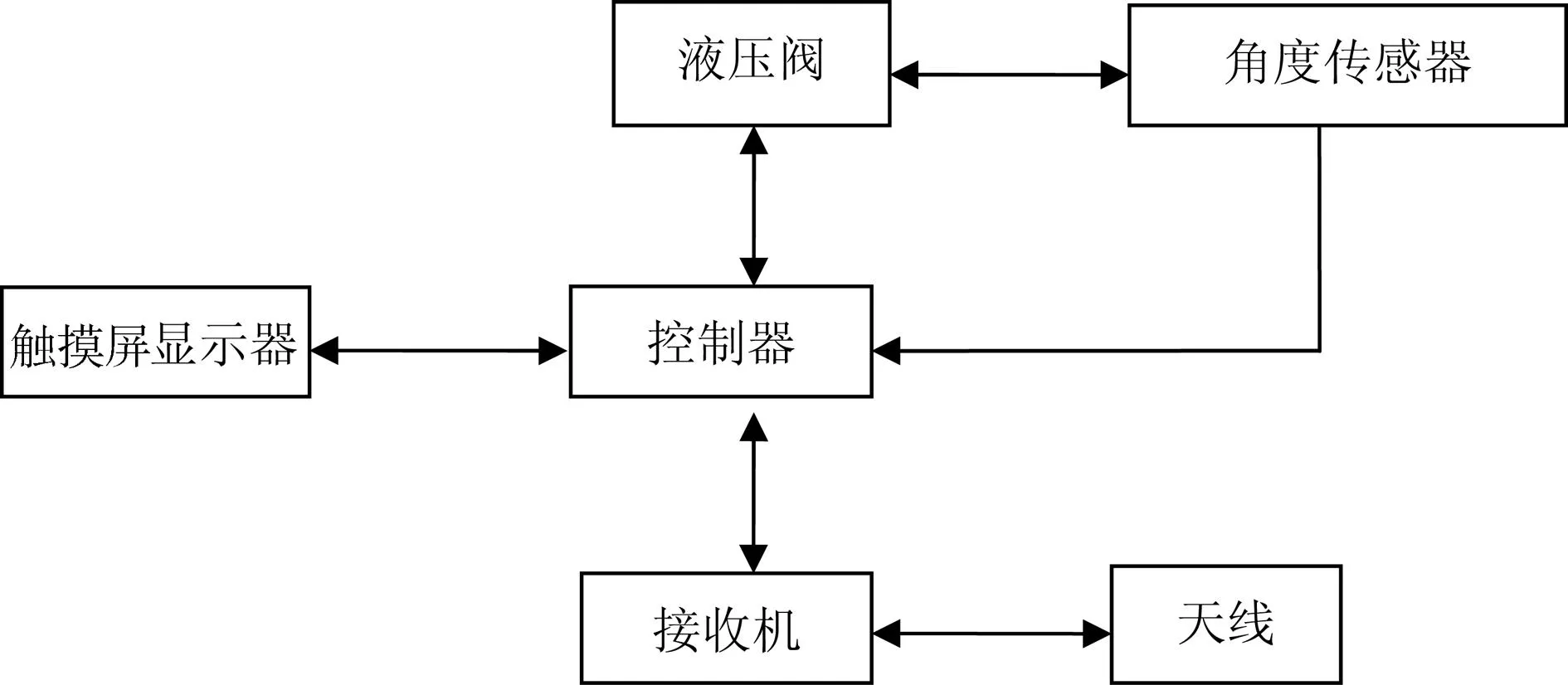
图3 控制系统工作方式
3.1控制器
控制器是自动转向控制系统的核心,具备三个主要功能:采集数据并对其进行处理(将传感器输出的模拟信号转换成可以处理的数字信号);根据目标转角和实际转角的偏差信号,控制集成液压阀完成转向操作;实现各部分之间的数据传输。
拖拉机自动转向控制系统中的控制器是自动转向的决策部分,通过对相关传感器信号的融合判断,计算得到转向轮的目标转角,然后将目标转角值发送到液压阀,由液压阀控制转向执行机构完成转向操作。
3.2集成液压阀
集成液压阀内置比例阀、三位四通电磁换向阀和安全阀,融合电控部分,实现拖拉机的液压油路控制。集成液压阀电信号连接端与控制器相连,将控制器输出的电压信号转换为对液压油流量和方向的控制。液压阀示意图如图4所示[8]。
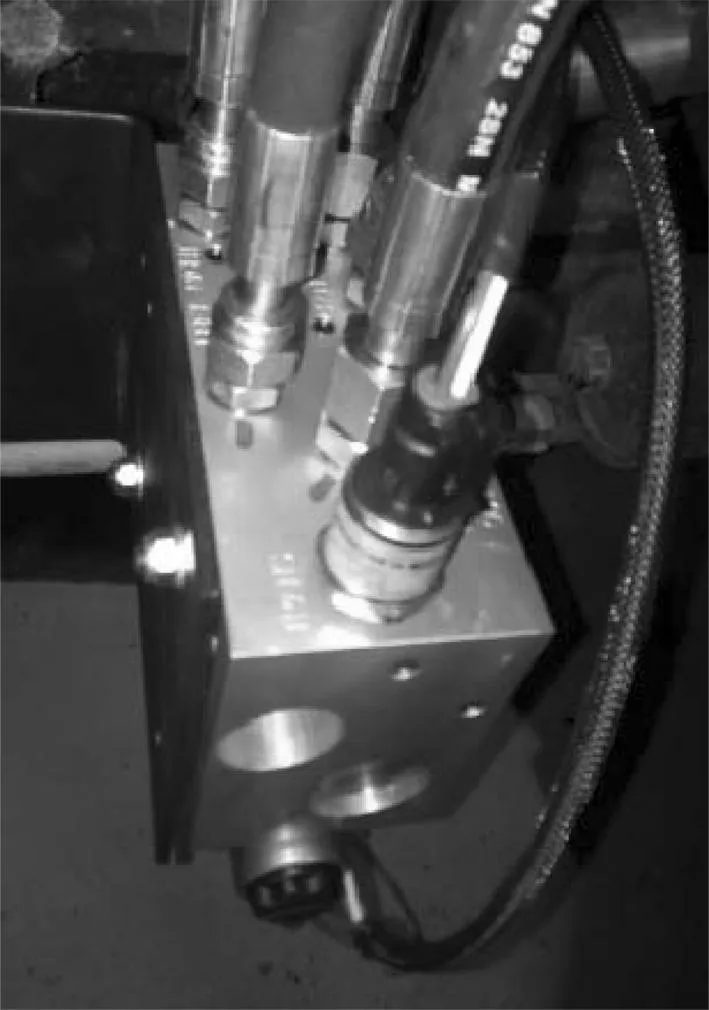
图4 液压阀
比例阀(即电液比例阀),是一种按输入的电信号连续地、按比例地控制液压系统的液流流量和压力的阀类。它由电—机械比例转换装置和液压控制阀本体两大部分构成。前者将输入的电信号连续地按比例地转换为机械力和位移输出,后者在接受这种机械力和位移之后,按比例连续地输出油液流速和流量,实现在工作过程中对液压系统的压力、流量参数进行调节或连续控制。
3.3角度传感器
角度传感器是将角度变化转换为电信号的一种装置,其精度直接决定转向控制系统的工作精度。角度传感器内部带有精密集成放大电路,将测量所得的角位移信号进行放大,线性输出0—5V电压信号,实现传感器和交送器的一体化。角度传感器如图5所示[8]。

图5 角度传感器
传感器的转轴通过螺栓和固定杆连接在一起,固定杆的另一端固定在车身上,因此传感器的转轴相对于车身静止。工作时,安装在传感器支座上的角度传感器同转向节立轴一起转动,从而使转轴和传感器之间产生相对转动。
3.4显示器
显示器为用户提供直观使用界面,方便调整作业模式。显示器的主要功能包括用户指令输入、人工/自动控制切换、系统工作状态显示和实时位置反馈等。显示器的指令输入主要包括以下几个设置。
(1)地块设置。定义地块名称及工作方式,自行标记已作业区域,数据保存后可重复调取使用;
(2)路线设置。划定车辆行走路线,规定车辆工作行间距;
(3)农具设置。设置农具尺寸及相对车体位置,方便线路划定;
(4)车辆信息设置。输入车辆尺寸信息,精确定位并控制车辆按规定路线行驶;
(5)卫星设置。观察卫星数量以及Heading值是否稳定。
3.5接收机与天线
车载部分与基站部分均使用M300 GNSS接收机和AT300 GNSS天线。
M300 GNSS接收机采用BDS+GPS双星五频GNSS模块,增加跟踪卫星数量,增强GNSS的可用性及可靠性,提高在高遮挡地区的位置定位精度。
AT300系列测量型天线涵盖双星单频、三星单频、双星四频、双星五频、全频等多种型号,具有信号稳定、体积小、重量轻、防水防尘、抗震等优越性能,可配合M300接收机实现精准定位。
4拖拉机自动转向控制系统的展望
本方案所提出的自动转向控制能够实现农业机械的辅助作业,有效提高农业生产的质量和效益,降低驾驶员长期作业疲劳度,提升农机作业的技术水平。今后进一步发展就是拖拉自动驾驶控制系统。本文所论述的基于液压改造方案的方向控制系统已在现有拖拉机上实现自动转向控制,在此基础上,结合车辆变速控制及自动倒车控制即可实现拖拉机的自动驾驶。车辆变速控制及倒车控制可通过外部加装机械机构实现。例如,外部添加固定机架、X和Y导轨、变速杆的抱紧与机械手的联接装置及控制系统等,通过测试原车变速杆的工作范围,设置外加装置参数,根据控制器指令实现车辆变速杆的自动控制,从而达到自动变速及自动倒车的目的。车辆自动驾驶的实现还需要外部加装传感器,避免碰撞等,保证车辆工作的安全度。
总之,通过高精确度差分GPS、机械操作控制器、传感器和液压阀等部分的配合工作,可以实现精确地控制农业机械的驱动系统、线控系统和液压系统,从而实现智能导航和自动驾驶的目的。
参考文献:
[1]Qiu H,Zhang Q.Feedforward-plus-proportional-derivative controller for an off-road vehicle electrohydraulic steering system[J].Journal of Automobile Engineering,2003,217(5):375-382.
[2]李军.拖拉机播种作业机组自动驾驶转向控制系统设计与研究[D].新疆:石河子大学机械电气工程学院,2012:2-3.
[3]张智刚,罗锡文,李俊岭.轮式农业机械自动转向控制系统研究[J].农业工程学报,2005,21(11):77-80.
[4]胡烁,罗锡文,赵祚喜,等.插秧机电控操作机构和控制算法设计[J].农业工程学报,2009,25(4):118-122.
[5]陈文良,宋正河,毛恩荣.拖拉机自动驾驶转向控制系统的设计[J].华中农业大学学报,2005(10):57-62.
[6]吴晓鹏,赵祚喜,张智刚,等.东方红拖拉机自动转向控制系统设计[J].农业机械学报,2009,40(1):1-5.
[7]方恩民,孔庆龙.GPS自动驾驶技术在现代农业机械上的应用[J].现代化农业,2012(7):63.
[8]武汉纵横天地空间信息技术有限公司.自动导航驾驶系统资料[Z].武汉:武汉纵横天地空间信息技术有限公司,2014.
A reform scheme of automatic steering control system for tractor
ZHANGYuan-yuan,ZHANGShuang-shi,ZHANGJia-fan
(School of Mechanical Engineering,Wuhan Polytechnic University,Wuhan 430023,China)
Abstract:The automatic steering control of a tractor is a fundamental performance requirement of its autopilot, which operates the tractor according to the planned path. A reconstructive scheme for the oil way based on the existing tractor hydraulic system is proposed to implement the automatic steering control. The basic configuration and working principles of this control system are introduced detailedly as far as the reconstructive scheme is concerned. Finally, some prospect and suggestions are put forward to this scheme.
Key words:tractor; autopilot; hydraulic system; steering control
DOI:10.3969/j.issn.2095-7386.2015.04.010
文章编号:2095-7386(2015)04-0035-04
通信作者:范丽丽(1981-),女,副教授,E-mail:fll810@live.cn.
作者简介:李博(1991-),男,硕士研究生,E-mail:304237607@qq.com.
收稿日期:2015-09-18.
中图分类号:TP 273.5
文献标识码:A
猜你喜欢
小学生学习指导(小军迷联盟)(2021年11期)2022-01-18 05:14:00
小学生导刊(2017年15期)2017-05-17 05:44:08
中国科技纵横(2017年4期)2017-05-16 08:29:17
移动通信(2016年24期)2017-03-04 22:12:26
中国教育技术装备(2016年20期)2016-12-12 10:03:08
小布老虎(2016年12期)2016-12-01 05:47:00
企业技术开发·中旬刊(2016年10期)2016-11-12 16:11:54
家用汽车(2016年9期)2016-11-04 15:04:44
大学教育(2016年9期)2016-10-09 08:45:14
科技视界(2016年20期)2016-09-29 11:42:34