
多平台雷达点迹数据融合技术
2016-01-27 08:06张伯彦罗兴旺蔺宏江文树梁
系统工程与电子技术 2015年7期
张伯彦, 罗兴旺, 蔺宏江, 陈 映, 文树梁
(北京无线电测量研究所, 北京 100854)
多平台雷达点迹数据融合技术
张伯彦, 罗兴旺, 蔺宏江, 陈映, 文树梁
(北京无线电测量研究所, 北京 100854)
摘要:对构建实际多平台雷达点迹数据融合系统所涉及的关键技术进行全面阐述,重点介绍理论算法与工程实际需求相结合的综合设计问题,包括空间配准、数据关联的设计准则,复杂环境下点迹估计融合中的权值计算方法以及坐标系的选取等。同时,给出一种多平台雷达数据融合系统运行环境仿真的总体结构及主要处理模型。仿真及雷达数据的验证结果表明,所提出的设计准则和计算方法具有良好的跟踪融合效果,适合应用于先进的多平台雷达数据融合系统中。
关键词:多平台; 点迹数据融合; 互联
0引言
20世纪70年代,美国开展多声呐信息融合系统研制,提出将传感器联网构成协同作战系统(cooperative engagement capability, CEC)[1-2]并形成协同作战能力的构想。从1987年起,美国三军每年召开一次信息融合学术会议[3],把信息融合列为20世纪90年代重点研发的20项关键技术之一,且列为最优先发展的A类。在20世纪90年代成立了国际信息融合学会并创立了会刊《Information Fusion》,信息融合成为多方关注的共性关键理论和技术。21世纪以来美国防部进一步把信息融合作为许多复杂大系统,如CEC中的关键技术进行攻关研究。因为信息融合技术将输入信息在各协同单元上分别、并行地进行融合处理形成复合跟踪航迹,为形成精确目标指示、协同作战能力奠定基础,本文正是对信息融合中的点迹数据融合涉及的关键技术进行研究。
点迹数据融合系统要处理来自多个运动平台上的雷达测量的点迹,一般来说,点迹指雷达提取器提取的雷达测量数据。这些数据受到背景噪声如地杂波、海杂波以及雷达系统噪声的污染,多个动平台雷达多目标点迹相关互联及融合跟踪是一项基本要求。显然,运动多平台雷达点迹数据融合的处理相当复杂,因此为了构建一个有效的多平台雷达点迹数据融合系统,仿真工作与系统研制相结合非常必要。此处仿真指多平台雷达点迹数据融合系统运行环境的仿真,包括目标场景仿真、杂波模拟、多型雷达模拟及显示评估。
1点迹数据融合系统及关键技术
1.1点迹数据融合结构
信息融合层次一般按如下划分:
(1) 信号/特征估计:对多类传感器原始信号(数据或图像)进行融合,结果为信号/特征的状态与可信度估计。
(2) 实体估计:对目标位置和属性的估计,多雷达点迹数据融合属于这级融合范畴。
(3) 态势估计:指对战场态势关系和可信度的估计。
(4) 威胁估计:对战场上战斗力量分配情况的评价估计,对作战意图作出指示报警,定量表示敌方作战能力及估计敌方企图。
(5) 过程估计:根据指挥决策、火力控制等对信息的需求,对多级融合系统的性能进行估计得到性能、效能等的度量。
多平台点迹数据融合系统示意图如图1所示。首先,预处理层接收雷达数据以及平台的导航信息并进行处理,同时进行时间对准和空间统一处理,为上一层的相关与融合做好“一致性”准备;相关与融合层要对点迹和航迹进行关联处理;复合跟踪与航迹管理层的任务是对融合后的航迹形成复合跟踪,对目标航迹信息进行管理,在系统内形成统一态势并进行数据输出。这样的系统结构很容易由目前的以目标位置估计为主的实体估计融合扩展到美国国防部联合指挥实验室数据融合专业组推荐模型[4-5]中的信号/特征估计、态势估计、威胁估计和过程估计。
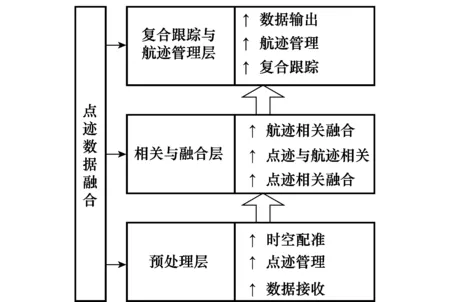
图1 多平台点迹数据融合系统示意图
1.2时空配准
时空配准是实现多雷达数据关联与融合的前提。
时间配准指的是将网内各雷达关于同一目标的不同步的量测数据统一到同一基准时刻。采用N发N收非相参体制的数据融合系统工作时,各雷达在时间上是不同步的,因为每部雷达的开机时间不一样,扫描周期不同,特别是有的雷达其工作模式呈现变数据率的TAS状态。在进行多雷达数据融合时需要将不同步的测量数据对准到融合时刻。N发N收非相参体制的数据融合系统的时间配准主要采用内插与外推相结合的方法,配准精度主要取决于目标速度估计精度。
空间配准指的是利用多雷达对共同目标的测量估计雷达的偏差。多雷达的偏差主要包括:雷达站址误差;雷达测角偏差;雷达测距偏差等。其中雷达站址误差属于极点误差,极点误差归结为全球定位系统(global positioning system, GPS)定位误差,由于一般采用伪距差分的GPS,其定位误差是米量级,所以此处忽略GPS 定位误差的影响。雷达测距偏差对系统影响不大并且易于补偿。雷达测角偏差的存在使目标探测位置以雷达波束指向为轴相对真实位置发生旋转(在不存在随机误差情况下),包括水平方向和垂直方向,对于单雷达来说,这种偏差对每个目标都是一样的,只是产生一个固定偏移,并不会影响整个系统的跟踪性能;而对于多雷达数据融合系统来说,由于不同雷达关于同一目标的航迹之间存在较大的偏差,从而有可能被认为是不同的目标,这会给关联和融合带来困难,使整个融合系统性能下降。多雷达空间配准误差是一种系统误差,不能通过滤波技术加以消除。空间配准技术要点包括:
(1) 将各雷达数据进行坐标变换,统一到同一坐标系;
(2) 将各雷达进行系统误差静态校准;
(3) 在有合作目标和单目标情况下,动态估计各雷达系统误差并补偿;
(4) 在多目标和实际场景中,针对系统误差估计与数据关联互为前提特点,将多雷达数据关联与系统误差估计迭代进行,可以达到逐步求精效果。
1.3点迹/航迹管理
20世纪80年代,海上适合军民两用雷达的数据处理系统的典型处理能力[6]是256批航迹,500~1 000个点迹。Raytheon Solipsys公司的MSCT的典型性能[7]:100个传感器和系统,每秒17 000批航迹,每秒20 000个点迹;ThalesRaytheonSystem公司的Skyview典型性能[8]:100个传感器,每秒1 000批航迹。因此为了提高处理效率,必须对点迹、航迹进行管理。一般来说,点迹、航迹管理方法有空间管理和时间管理。空间管理是将点迹、航迹数据按雷达扫描扇区和距离进行编排,时间管理是将数据按照测量时间进行时间分区编排。
将雷达的整个探测空域按方位和距离划分成若干小区域,每一个小区域称之为一个分区。在对点迹、航迹数据按照空间编排时,在数据融合的处理周期内,依次对每一个分区及其相邻分区的点迹和航迹进行处理,直到将所有分区全部处理完毕。
除了上述空间编排以外,还需要对系统航迹和周期性扫描雷达的探测点迹进行时间分区编排处理,时间分区编排包含以下两个方面内容。
(1) 预测系统航迹下一更新时刻
与单雷达不同,系统航迹是由不同雷达探测的点迹关联滤波形成的,并且这些点迹的探测时间是不规则的。综合考虑对系统航迹有贡献的多雷达当前更新时间ti和雷达的数据周期Ti,系统航迹下一更新时刻的预测tp可取二者之中的最小者。
(2) 处理时间分区内的数据
考虑到系统航迹更新周期预测值与实际值存在偏差,在进行点航关联处理时,点迹只与满足下列条件的系统航迹进行关联处理。
条件 1预测数据来源相同;
条件 2预测更新时刻所在时间分区与点迹所在时间分区相同或相邻。
对于非周期扫描雷达,由于其对同一目标的探测周期不固定,无法对其更新周期进行预测,不能按上述方法进行时间分区处理,可以将这类雷达的数据与周期性扫描雷达数据分开处理,并将处理结果再进行融合。
多雷达点迹数据融合系统的航迹存在4种状态:起始航迹、暂时航迹、可靠航迹和删除航迹。根据一定的准则进行这4种状态的切换,也是航迹管理的主要内容。
将点迹、航迹按时间和空间分区编排处理,可以减少关联计算量,提高处理效率,方便及时送出系统航迹;在相关互联处理时考虑相邻分区的衔接,增加了相关正确概率。
1.4数据关联
数据关联包括相关和互联两个不同的处理过程。
相关:一般来说工程界的相关就是以已有航迹的预测值为中心建立一定大小的相关区域(称为相关门),把落入相关门内的所有点迹判断为与该航迹相关的过程。
互联:指用最近邻(nearest neighbor,NN)、全局最近邻法(global nearest neighbor,GNN)或联合概率数据关联(joint probabitistic data association, JPDA)等方法,在与航迹相关的点迹中选择一个点或求出等效点与该航迹配对的过程。
相关门的大小D取决于雷达测量精度σR和σθ、目标距离R和待判数据的时间差T以及速度变化ΔV。在实际应用中,由于机动不可避免,可将Kalman滤波器的新息构成的统计量[9]g(k)引入到相关门的计算中,一种相关门计算方法如下:
(1)

除此以外,在干扰、杂波情况下,相关门的尺寸应适当减小。
NN法是工程上常用的关联方法之一,该方法基于距离度量最小准则,是一种局部最优的算法,这种方法在目标密集时常常发生关联错误;采用总距离之和最小准则的GNN法,其解是此类问题的最佳解,在目标比较密集情况下误关联明显减少。但是选择最佳解的主要缺点是当观测和目标的数目都比较大时,计算量太大。如果采用矩阵n×m最优分配算法[10],则求解最佳解的计算复杂度由m!·(m-n)!下降到n2m(n和m分别是关联矩阵的行数和列数),这样的计算负担工程上可以接受。为了构建实用的互联算法,需要采用如下附加准则:
(1) 加入硬判决:根据目标的不可模糊因素,对目标进行如下硬判决:不同属性的目标不判关联;分属不同高度层的目标不判关联;速度和航向差异较大的目标不判关联。
(2) 在航迹起始阶段,应用多假设思想进行多分支起航,经过5~8周期再将暂时航迹转为可靠航迹,可有效抑制杂波或者干扰情况下的虚假航迹。
(3) 如果波门内无任何测量值,只能取预测值作为测量值,同时采用分叉技术,一个按原来航迹外推,一个按照机动外推。当连续无测量值次数超过一定帧数时,终止该目标的航迹。
采用如上相关门技术、互联算法和附加准则,可以获得改善的数据关联效果。
1.5估计融合
估计融合[11]环节处理的数据是假定多个雷达的测量来源于同一个目标。估计融合算法种类繁多,并与融合结构密切相关。简单凸组合融合是一种工程上常用的方法,当各雷达量测之间互不相关时,融合效果良好。
在点迹数据融合系统中,由于系统获得的输入是雷达点迹报告,因此估计融合将涉及多平台雷达的测量误差。假设雷达i的测量误差为σRi、σAzi、σEi,那么在融合中心其位置精度为σxi、σyi、σzi,假设某时刻k有M个来自于多平台雷达的测量点迹,并且这些点迹都属于同一个目标,则位置融合权值kxpos_i和速度融合权值kxvel_i计算如下:
(2)
式中,Ti是雷达的数据周期。其他方向与之类似。
但是,上述简单凸组合融合方法并不适用干扰和杂波环境下的估计融合,其原因是融合权值不仅取决于雷达精度,而且应该与点迹或者航迹所处的环境相匹配,即杂波区和非杂波区的点迹或者航迹应该具有不同的的融合权值。干扰和杂波环境下融合权值计算是通过对式(2)进行扩展得到的,即对式(2)中的雷达精度σxi引入附加系数Cxi,称其为杂波系数。Cxi根据雷达i的测量点迹/航迹位于非杂波区、一般杂波区及强杂波区而选取不同的值,一种选取方法为Cxi=1,2,32分别表示非杂波区,一般杂波区和强杂波区的系数。雷达的非杂波区,一般杂波区和强杂波区划分依赖于雷达杂波图,将网内每个雷达的探测范围进行网格划分,并实时依据点迹在时域和空域的密集程度可以形成雷达动态杂波图。相比仅仅依赖于雷达精度的融合权值计算方法,同时考虑环境因素和目标精度获得的融合权值可有效改善干扰和杂波环境下数据融合的效果,如第3节所示,并且计算量适中。
更高级的产生融合权值的方法是依靠推理。一种雷达数据融合权值知识库结构如图2所示。图中置信度判别器,其输入为雷达状态、探测精度、航迹滤波方差或者点迹精度等事实,结合雷达特征库存贮的数据(系统误差、起伏误差),根据经验建立模糊IF-Then规则,通过自适应网络模糊推理系统(adaptive-network-based fuzzy inference system, ANFIS)[12-14]得到各雷达置信度。由于ANFIS应用于非平稳信号、非高斯噪声情况下难以收敛到给定的误差,为此,在ANFIS模型基础上,当数据在网络中前向传输时,采用鲁棒的最小二乘法估计参数;当误差信号反传时,用广义极大似然估计误差函数作为估计雷达置信度的依据。这样,得到的估计参数是最优的,并且收敛速度非常快。

图2 多雷达数据融合权值知识库结构示意图
权值计算推理其功能是由各雷达的置信度推理得到各雷达的权值。本文有5部传感器,根据经验可得到如表1所示的融合权值推理规则。表中Ui表示第i部雷达的置信度,T1>T2>T3为规定阈值,可根据经验设定。
估计融合结果是用各雷达的权值对它们的航迹或点迹数据进行加权。需要说明的是,这里的权值不同于传统的融合加权系数,而是通过推理得到的;模糊IF-Then规则以及规则阈值是知识库的核心内容,是对多雷达数据融合理论、数据融合专家的知识和经验、多次系统试验和仿真试验的结果等进行分析、综合,并按照一定的数据结构组织得到的知识集合。
研究结果表明,建立融合权值知识库并根据该知识库产生的权值对多雷达数据进行估计融合,可获得干扰和杂波环境下良好的数据融合效果并且适合大数据应用场景,当然方法复杂,计算开销很大,在应用时需要折中考虑。

表1 融合权值的推理规则
坐标系对融合估计的影响不容忽视。在地心坐标系进行融合估计能够减少雷达载体运动带来的影响。除了需要将雷达数据变换到地心直角坐标系,还需要将量测误差协方差矩阵和滤波误差协方差矩阵变换到地心直角坐标系。下面不加推导地给出有关计算公式。
地心坐标系的量测误差协方差阵Re为
(3)

地心坐标系的滤波误差协方差矩阵Pe由位置、位置-速度、速度的误差协方差Pepos,Pe pos-vel,Pevel构成,记T为数据间隔,有
(4)
1.6复杂背景下的点迹数据融合
在干扰、海杂波情况下,目标检测常常非常困难,当目标的信噪比较低时,即便满足检测概率的条件,单帧检测结果中不仅有目标,也会包含疑似目标、噪声、干扰和杂波[17-20]。为此,必须依靠目标在多帧信息中的相关性进行检测,这是因为目标在帧间存在较强的相关性,而噪声、干扰和杂波则不具备相关性。采用多帧信息并结合其他信息(运动学特性、时间特性等)进行多帧融合判相关,以及融合权值依点迹或者航迹位于杂波区或者非杂波区而不同的复杂背景下的点迹数据融合方法,可以在满足检测概率和虚警率的条件下维持目标的连续跟踪。第3节的试验也证明了这一点。
2仿真技术与仿真系统
为了降低点迹数据融合系统的研制成本并缩短开发周期,设计构建了一个全部由计算机和软件完成的交互式点迹数据融合的运行环境。仿真模拟了多模式雷达的工作过程,包括对空、对海、监视、跟踪等模式,这些雷达的扫描周期、开机时间及送出数据的时间各不相同,再现这些雷达的性能和数据时序关系是仿真的基本要求。除此以外,雷达背景杂波、目标场景以及载体平动和摇摆的模拟均是研制一个满足多样化任务需求的点迹数据融合系统必不可少的环节。
2.1仿真结构、功能概况
图3给出了仿真系统的功能概况。图中仿真控制功能主要包括:
(1) 系统授时;
(2) 动态配置各平台和融合中心的经纬高;
(3) 目标场景参数设置;
(4) 平台模拟器参数设置;
(5) 各平台上雷达类型、参数设置和控制。
目标场景仿真可以产生多批次进入时间不同、服从泊松分布的匀速运动或机动目标,还可以通过读取数据文件的形式获得目标场景,以满足开发、调试、评估点迹/航迹融合系统的需要。噪声采用零均值高斯分布模拟。杂波包括海杂波和气象杂波等,海杂波用幅度为K分布的高斯谱杂波来表示,气象杂波采用幅度为韦布尔分布的高斯谱模型来描述。这些杂波对于雷达目标检测性能的影响以雷达工作频段、作用距离不同而有所不同,采用等效检测概率处理的方法对于研究、开发、调试、评估点迹数据融合系统仍然能够获得较高的逼真度。
雷达模拟包括电扫和机扫天线、收发系统、信号处理、数据处理和终端系统的模拟。平台模拟指对雷达载体平台(如空基和船基)的模拟。

图3 多平台雷达点迹数据融合系统及运行环境仿真框图
2.2仿真系统硬件体系结构
仿真控制、目标和平台模拟器及显示评估等具有人机交互功能的子系统基于普通PC机实现,操作系统为Windows。多型雷达模拟器集成在CPCI总线机箱中,并用软件实现,操作系统为VxWorks。融合软件运行于Windows操作系统,并采用C++语言实现。系统不同节点间均通过以太网交换机进行通信。一个基于网络化、通用化、可扩展、分立与分布式相结合的仿真系统硬件组成示意图如图4所示。

图4 点迹数据融合及仿真系统硬件组成
2.3设计特点
本仿真系统的设计是针对特定需要的,即功能有限,否则其造价就很高昂。但是对于实际工程来说多样化是很重要的。可行的解决方法是用软件并采用模块化设计,通过功能、参数、接口的通用性设计来实现仿真系统未来的可扩展和重构。
功能的通用性设计表现在将系统中的各个功能划分为相对独立的子功能,各子功能接口详尽明确,高度专用的功能与其他功能相隔离。
参数的通用性设计表现在为每个功能、每个模块、每个函数设计完整的参数集及完整的文件说明,包括各参数的类型、大小、输入/输出等。
接口和协议的通用性设计使得本系统适合进行半实物仿真和数学仿真。可以接入雷达实物、其他雷达模拟器或者试验数据来验证开发的融合系统的性能,也可以方便地接入其他融合系统,作为数据融合系统评估与试验床使用。
2.4评估统计
本系统仿真中包含各种评估统计,如数据融合性能和精度统计。数据融合性能统计主要包括正确关联、错误关联和漏关联概率,精度统计包括融合结果的均值和方差。此外更复杂的评估指标还包括态势完整性和正确性、航迹稳定性等。
3仿真试验
由目标模拟器模拟56批目标,这些目标的进入参数(斜距、高度、方位、速度、航路捷径及航迹倾角、进入时间)略不同;同时用多型雷达模拟器模拟动平台上的6部雷达(R0~R5,R5所在平台已经飞出画面)对上述目标场景的探测,这6部雷达探测目标的数据率为2~10 s不等,测量精度也各不相同,各雷达探测的点迹在图5中是用不同颜色表示的。对雷达探测的点迹进行融合,其结果如图5的实线所示,并标识数字1~56。由图5可见,融合形成的综合航迹清晰一致,显示了态势完整性、正确性以及航迹稳定性。
图6和图7中的点迹是某权威数据融合评估试验床产生的5部雷达(空基雷达已经飞出显示画面)对目标的探测数据,并用不同颜色表示,这5部雷达均受到海杂波的影响,场景中有多批目标作匀速或机动运动。融合结果如图中的实线所示。图6是融合算法改进前即使用简单凸组合得到的融合结果,可见图像十分混乱;而图7是综合使用本文模型、算法的融合结果,可见图像变得一致清晰。说明在复杂环境下本文模型、算法具有良好的适应性。
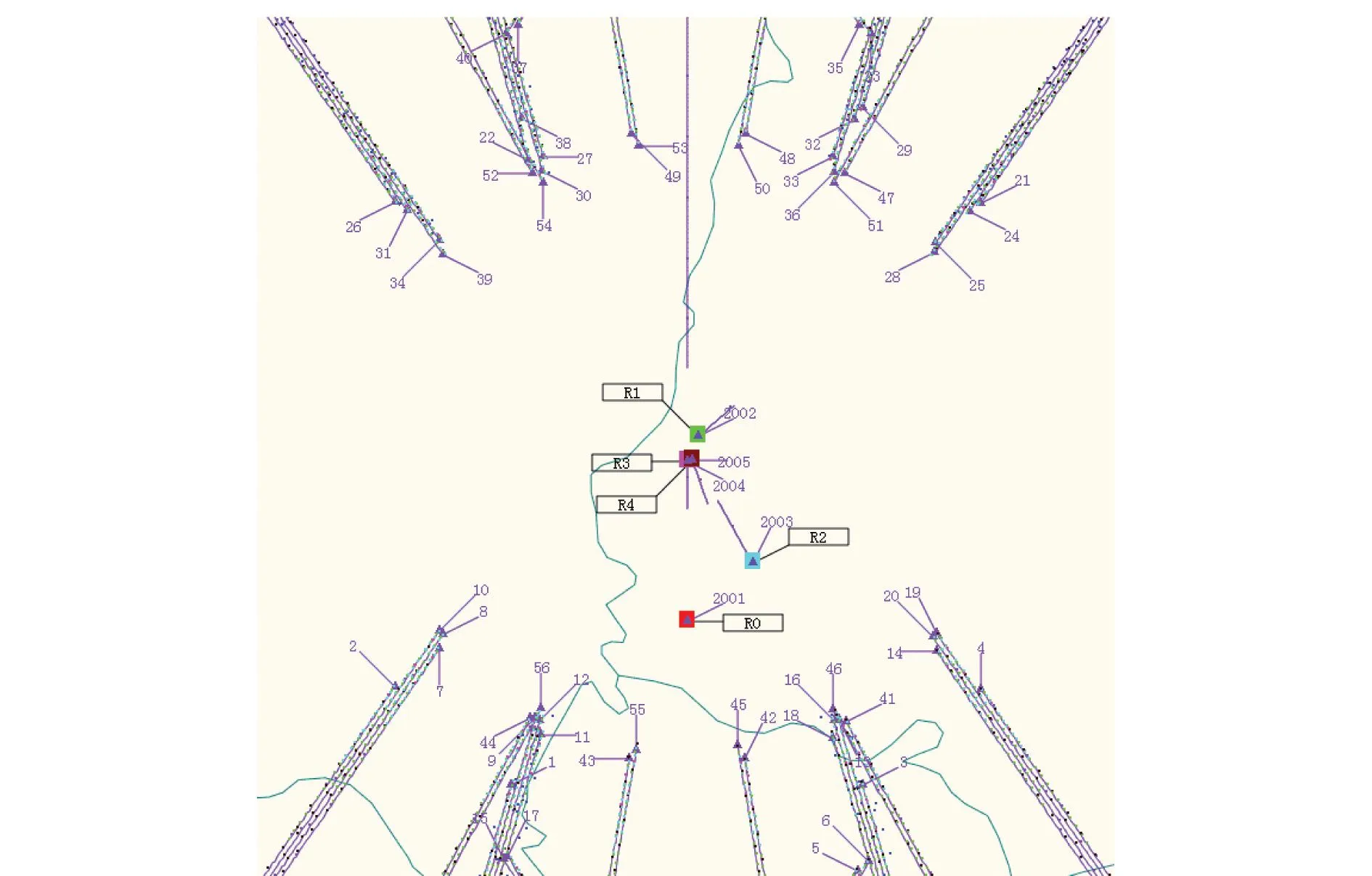
图5 多平台雷达多批目标的跟踪与融合

图6 海况与杂波下点迹数据融合(简单凸组合)
4结论
本文以构建的多平台点迹数据融合系统为背景,研究了涉及的关键技术,同时给出了该系统运行环境的仿真及主要模型。仿真试验和某权威数据融合评估试验床检验验证了本文给出的点迹数据融合处理模型、算法的有效性以及复杂环境下良好的适应性;建立的仿真系统为选择、改进融合算法,分析、检验、评估融合系统提供了一种除实物试验之外的更方便的方法,设计人员利用该系统可以预测到由于环境变化和融合技术改进对融合系统带来的影响,有效解决了复杂点迹融合系统研制过程中面临的许多问题,起到了缩短研制周期,降低成本,保证融合系统质量的作用。
参考文献:
[1] Daniel B, Conrad J G. Cooperative engagement capability[J].MilitaryTechnology, 2003(8/9):26-32.
[2] O′Neil W D. The cooperative engagement capability “CEC” transforming naval anti-air warfare[R]. ADA471258, 2007.
[3] He Y, Wang G H, Guan X.Informationfusiontheorywithapplications[M].Beijing:Publishing House of Electronics Industry,2010.(何友,王国宏,关欣.信息融合理论及应用[M].北京:电子工业出版社,2010.)
[4] Zhao Z G. Current status concept and structure model of information fusion technology[J].JournalofCAEIT,2006,1(4):305-312.(赵宗贵.信息融合技术现状、概念与结构模型[J].中国电子科学研究院学报,2006,1(4):305-312.)
[5] Liggins M E, Hall D L, Llinas J.Handbookofmultisensordatafusiontheoryandpractice[M].2nd ed.Boca Raton:CRC Press,2009.
[6] Farina A, Studer E A.Radardataprocessing(VolumeII)[M].Letchford: Research Studies Press LTD, 1985.
[7] Raytheon Solipsys Company. Multi source correlator tracker (MSCT) product information[EB/OL].[2014-05-26]. http:∥www.readbag.com/solipsys-pdf-production-msct 2007.
[8] Thales raytheon system company. Skyview:tactical air defense C4I system[EB/OL].[2014-05-26]. http:∥www. thalesraytheon.com/fileadmin/tmpl/Products/pdf/110882-Skyview_Datasheet_ A4_2pp.pdf.
[9] Cai Q Y, Zhang B Y, Qu H Q.Courseofphasedarrayradardataprocessing[M].Beijing:Publishing House of Electronics Industry,2011. (蔡庆宇,张伯彦,曲洪权. 相控阵雷达数据处理教程[M].北京:电子工业出版社, 2011.)
[10] Bourgeois F, Lassalle J C. An extension of the Munkres algorithm for the assignment problem to rectangular matrices[J].CommunicationsoftheACM, 1977,14(12): 802-804.
[11] Han C Z, Zhu H Y,Duan Z S.Multi-resourceinformationfusion[M].Beijing:Tsinghua University Press,2006.(韩崇昭,朱洪艳,段战胜.多源信息融合[M].北京:清华大学出版社,2006.)
[12] Jang J S R. ANFIS:adaptive-network-based fuzzy inference system[J].IEEETrans.onSystems,Man,andCybernetics,1993,23(3):665-685.
[13] Jang J S R, Sun C T, Mizutani E.Neuro-fuzzyandsoftcomputing:acomputationalapproachtolearningandmachineintelligence[M].Upper Saddle River: Prentice Hall, 1997.
[14] Quan T F.Targettracking:advancedtheoryandtechniques[M].Beijing:National Defense Industry Press,2009.(权太范.目标跟踪新理论与技术[M].北京:国防工业出版社,2009.)
[15] Bar-Shalom Y, Li X R, Kirubarajan T.Estimationwithapplicationstotrackingandnavigation:theoryalgorithmsandsoftware[M].New York: Wiley, 2001.
[16] Bar-Shalom Y,Willett P K,Tian X.Trackinganddatafusion:ahandbookofalgorithms[M].Storrs,CT:YBS Publishing,2011.
[17] Koch W.Trackingandsensordatafusion:methodologicalframeworkandselectedapplications[M].Heidelberg:Springer,2014.
[18] Huang D L, Leung H, Bosse E. A pseudo-measurement approach to simultaneous registration and track fusion[J].IEEETrans.onAerospaceandElectronicSystems, 2012, 48(3):2315-2331.
[19] Maresca S, Braca P, Horstmann J. Data fusion performance of HFSWR systems for ship traffic monitoring[C]∥Proc.ofthe16thInternationalConferenceonInformationFusion, 2013:1273-1280.
[20] Hess M, Pourvoyeur K. Integration of track-to-track fusion into multiple-modely filter[C]∥Proc.oftheTyrrhenianInternationalWorkshoponDigitalCommunications-EnhancedSurveillanceofAircraftandVehicles,2014: 101-105.
张伯彦(1957-),女,研究员,博士,主要研究方向为现代雷达控制与数据处理、机动多目标跟踪、数据融合。
E-mail:zhbyhktk@163.com
罗兴旺(1977-),男,高工,硕士,主要研究方向为雷达控制软件、数据处理与雷达仿真。
E-mail:mailapoluo@qq.com
蔺宏江(1974-),男,高工,硕士,主要研究方向为雷达控制软件、数据处理与雷达仿真。
E-mail:hitlin@tom.com
陈映(1984-),女,高工,博士,主要研究方向为雷达数据处理、弹道目标跟踪。
E-mail:michelle_cy@163.com
文树梁(1971-),男,研究员,博士,主要研究方向为雷达总体技术、目标识别与信号处理。
E-mail:wenshul@sina.com

网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20141208.1103.006.html
Researches on multiple-radar multiple-platform plot data fusion
ZHANG Bo-yan, LUO Xing-wang, LIN Hong-jiang, CHEN Ying, WEN Shu-liang
(BeijingInstituteofRadioMeasurement,Beijing100854,China)
Abstract:The key algorithms and techniques involved in an actual multiple-radar multiple-platform plot data fusion system are presented in detail. The main content focuses on the integrative design problem of combining theoretical algorithms and actual demands in practical engineering, which includes design rules of radar registration and data association, the weight calculating method in estimation fusion under complex environment, coordinate system selection and so on. Meanwhile, the whole configuration and main models of the system simulation are also presented. Simulation and validation results with radar data show that the performances of both fusion and tracking are good, and the design rules and methods are particularly valid for an advanced multiple-radar multiple-platform data fusion system.
Keywords:multiple-platform; plot data fusion; association
作者简介:
中图分类号:TN 953
文献标志码:A
DOI:10.3969/j.issn.1001-506X.2015.07.08
收稿日期:2014-08-04;修回日期:2014-08-27;网络优先出版日期:2014-12-08。
