
北斗兼容多星系统的CORS中心系统软件测试
2016-01-26 02:25宋玉兵,王开锋,王勇
测绘通报 2015年6期
北斗兼容多星系统的CORS中心系统软件测试
宋玉兵,王开锋,王勇
(江苏省测绘工程院,江苏 南京 230013)
一、系统概况
1. JSCORS
江苏省全球导航卫星连续运行参考站综合服务系统(JSCORS)项目是江苏省测绘地理信息行业“十一五”期间计划的重点项目。系统自2006年12月建成并投入运行至今,经过不断升级,现已有基准站130个。作为主系统的Leica Spider系统也由最初的仅支持GPS解算升级为支持GPS+GLONASS的双系统解算。
我国自主建设的北斗卫星导航系统已于2012年底实现亚太地区的覆盖,为亚太地区提供导航定位及通信服务。为响应“十二五”规划大力发展北斗产业的号召,JSCORS中心积极寻求与Leica合作,提供测试环境,期望Leica早日推出支持北斗系统的软件版本。
2. 北斗兼容GPS/GLONASS的CORS中心软件系统
2014年8月,Leica公司为其GR系列基准站接收机发布了支持北斗卫星数据接收的固件,增加了对北斗卫星信号的支持,实现了对北斗卫星信号的跟踪,并支持包含北斗、GPS、GLONASS三卫星系统的数据流发送,如图1所示。
2015年2月1日,Leica公司正式发布了支持北斗解算的CORS中心软件(以下简称中心软件)。中心软件实现了包含北斗卫星数据的数据流接入(RTCM3.2、LB2 MessageE)、包含北斗的卫星观测值数据的记录(RINEX3.0),将北斗卫星数据加入解算,网元模糊度计算引擎在之前GPS、GPS+GLONASS的基础上增加了GPS+GLONASS+BDS模式,并且支持双星系统与三星系统数据的混合解算。
二、系统测试
为检验新版本系统软件对测量效果的影响,JSCORS中心对系统进行了兼容性及定位精度的测试。
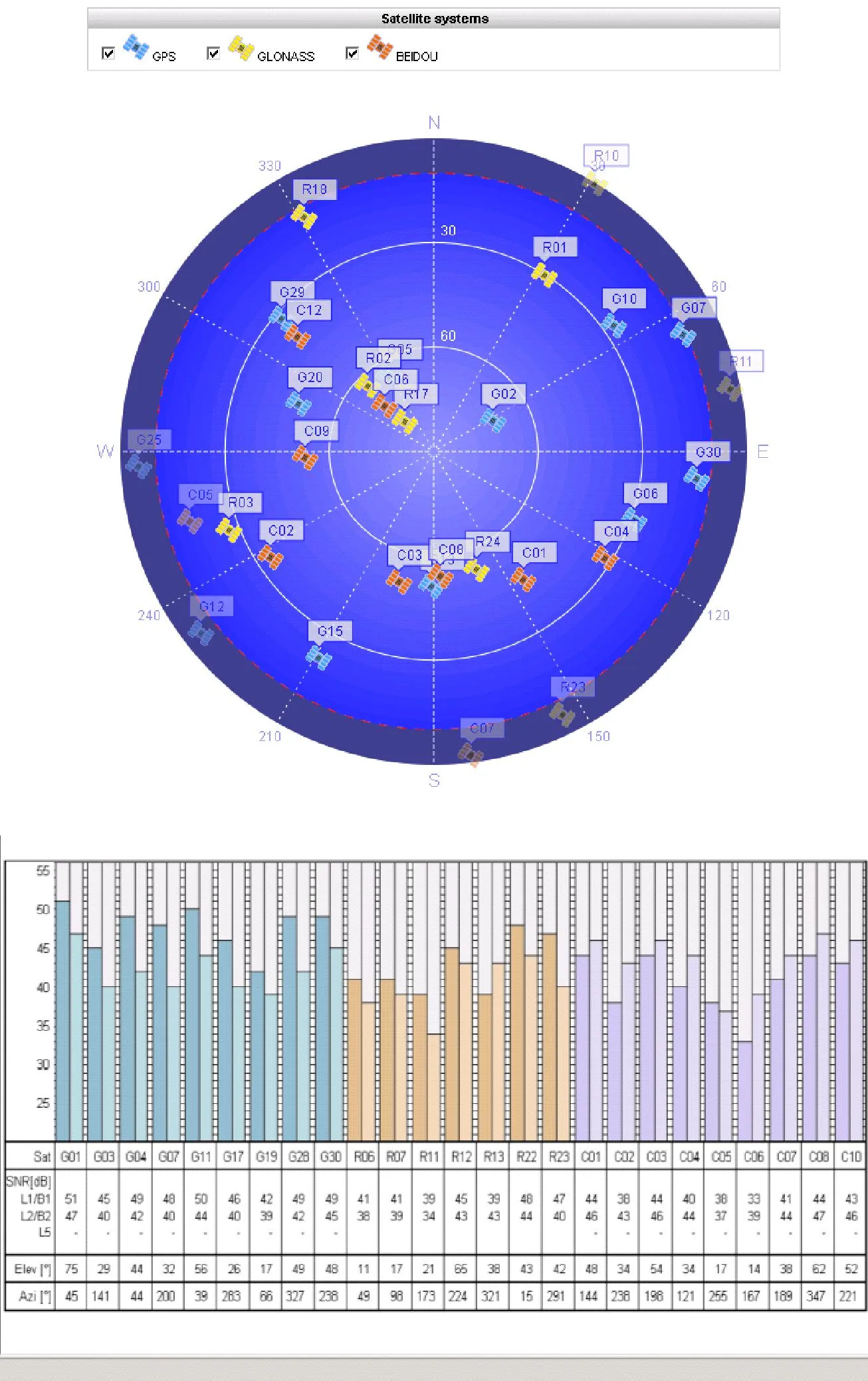
图1 徕卡基准站接收机实现北斗卫星信号跟踪
1. 流动站兼容性测试
流动站兼容性主要取决于CORS系统所能提供的RTK解算模式及其生成的改正数的播发格式。Spider丰富的RTK定位模式和全面的改正数播发格式,使得该系统有超强的流动站兼容性(见表1)。
表1Spider5.2.1提供的网络RTK定位模式及差分改正数的播发格式
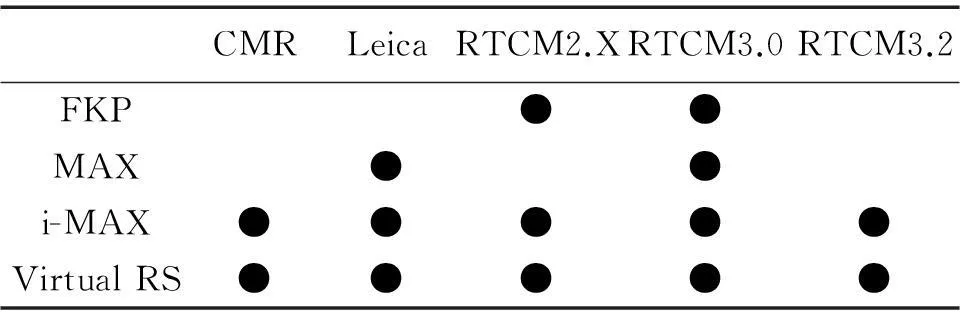
CMRLeicaRTCM2.XRTCM3.0RTCM3.2FKP●●MAX●●i-MAX●●●●●VirtualRS●●●●●
本次测试采用了市场上主流的不同厂商的流动站接收机,就现有的较为成熟的i-MAX和Virtual RS定位模式,以及GPS+GLONASS的双星系统与GPS+GLONASS+BDS三星系统改正数进行了兼容性测试,结果见表2。

表2 主流流动站接收机都能够正确获取改正数进行差分计算并获得固定解
2. 网络RTK定位精度测试
定位精度测试主要是对系统的网络RTK定位精度进行评定,取内符合精度和外符合精度作为评价指标。
本次测试选取了15个随机点和5个江苏省B、C级GPS控制点作为测试点。
测试采用连续测量方式,以1 s采样率、30个RTK定位结果为一组,每点分别采用GPS+GLONASS和GPS+GLONASS+BDS两种模式各记录3组数据,记录每组数据之前重新初始化卫星。
将测量结果作高斯投影,将结果转换为X、Y、H形式,分别取每点3个方向坐标的标准差为内符合精度,取3个方向坐标的均方根误差(5个B/C级控制点)为外符合精度,结果如图2—图5所示。
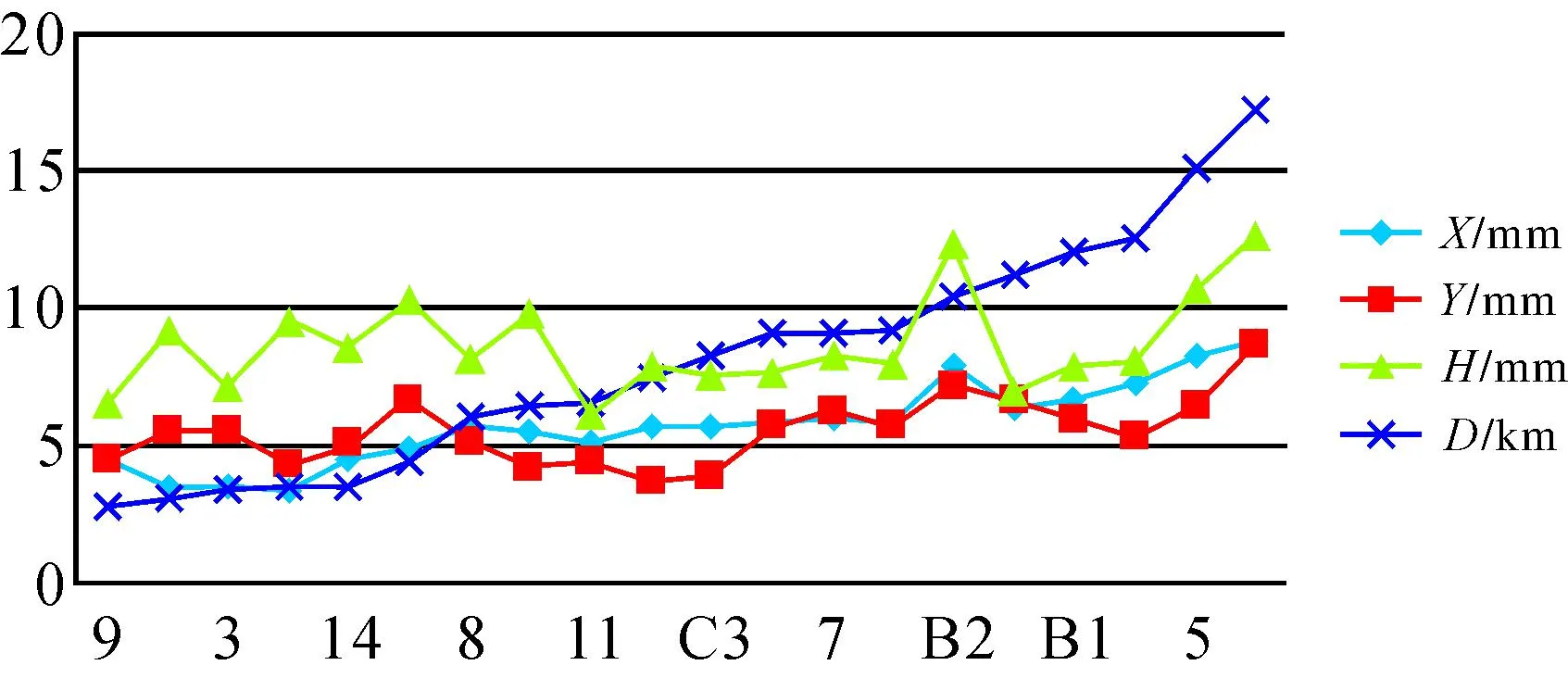
图2 测试点X、Y、H方向双星(GPS+GLONASS)内符合精度测试结果
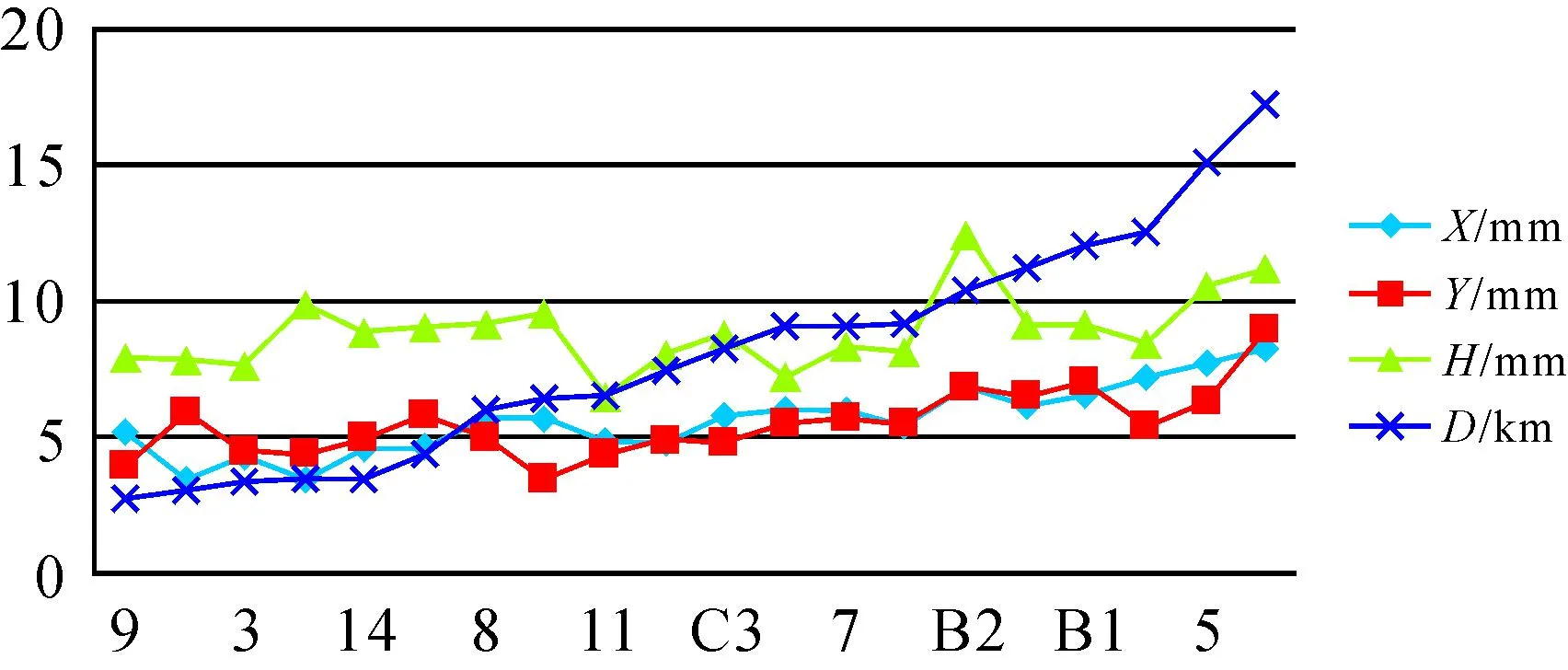
图3 测试点X、Y、H方向三星(GLONASS+GPS+BDS)内符合精度测试结果
以上结果显示中心软件系统定位结果精度稳定;定位精度随着流动站到基准站距离的增大而略有下降; GPS+GLONASS+BDS三星系统可用性良好,与GPS+GLONASS双星系统一致性高。
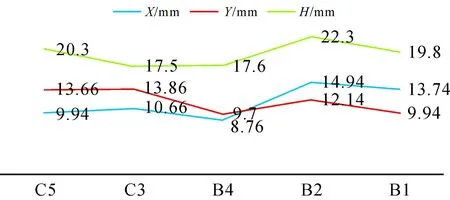
图4 测试点X、Y、H方向双星(GPS+GLONASS)外符合精度测试结果
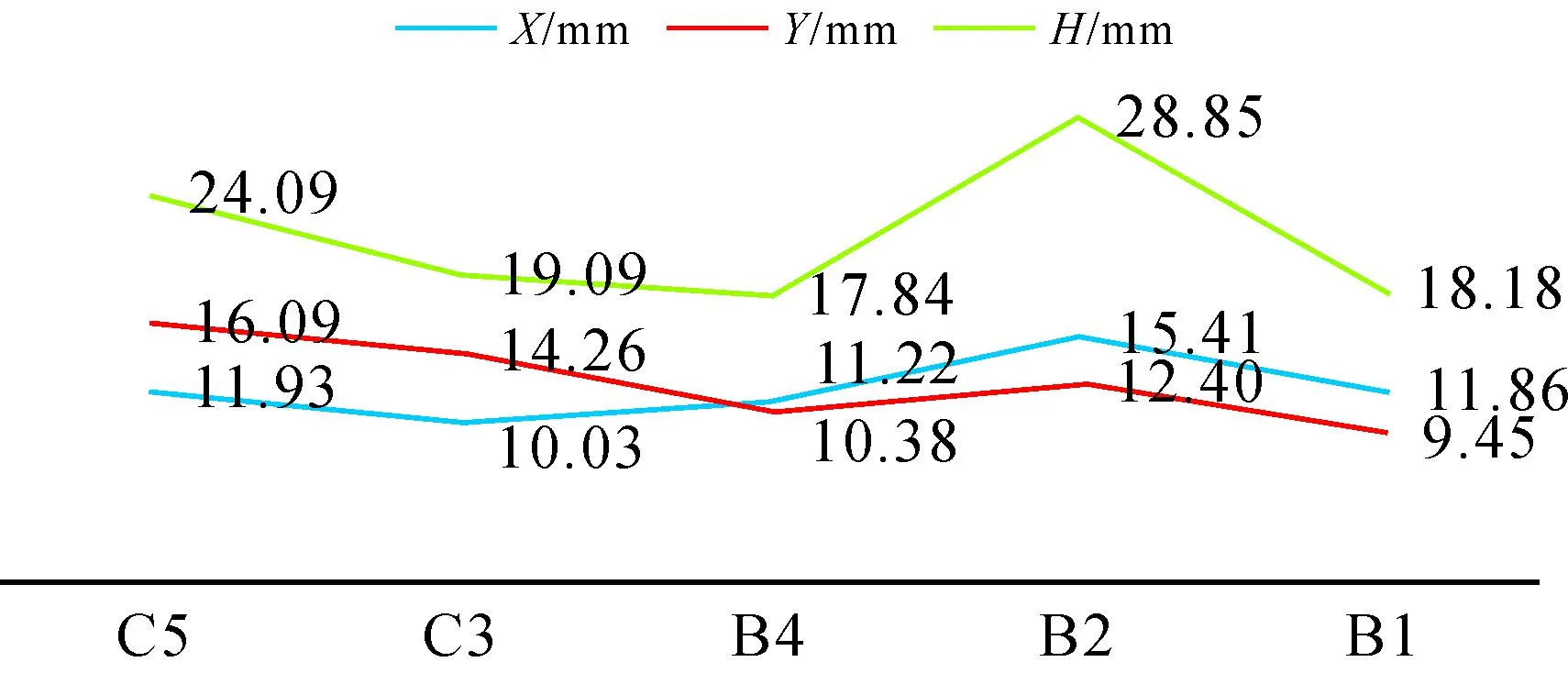
图5 测试点X、Y、H方向三星(GPS+BDS+GLONASS)外符合精度测试结果
加入北斗系统后,定位精度变化不大,高程方向精度略有损失。究其原因可能有两方面:一方面是北斗卫星的轨道精度还有待提高;另一方面是现有的北斗星座可见卫星数为8~11颗,其中GEO卫星5颗,约3.6万km的高度使得其信号难以被流动站接收机捕捉,使得北斗卫星真正利用的卫星数要少于可见卫星数,故未能提高测量精度。
三、结束语
Leica公司提供的中心软件能够提供可靠的北斗兼容GPS、GLONASS的网络RTK服务,系统稳定性和可靠性高,能够提供厘米级北斗RTK定位服务,大大拓展了北斗系统的应用服务。
(本专栏由徕卡测量系统和本刊编辑部共同主办)
天宝测绘解决方案专栏
猜你喜欢
水泥工程(2022年2期)2022-08-22
军民两用技术与产品(2022年1期)2022-06-01
上海大学学报(自然科学版)(2020年4期)2020-05-24
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
制造技术与机床(2018年10期)2018-10-13
科教导刊·电子版(2017年32期)2018-01-09
职教论坛(2017年23期)2017-11-15
法制与社会(2017年29期)2017-11-03
雷达学报(2017年1期)2017-05-17
