一种基于自抗扰控制技术的舰载雷达两轴稳定转台伺服系统
2016-01-23 18:53孙晋先中国船舶重工集团公司第七二四研究所南京211153
雷达与对抗 2015年2期
关键词:伺服系统
张 杰,孙晋先,刘 丽(中国船舶重工集团公司第七二四研究所,南京211153)
一种基于自抗扰控制技术的舰载雷达两轴稳定转台伺服系统
张杰,孙晋先,刘丽
(中国船舶重工集团公司第七二四研究所,南京211153)
摘要:针对舰载雷达两轴稳定转台的特点,设计了以浮点型DSP为核心的控制模块,采用自抗扰控制技术实现了舰载雷达转台方位-俯仰两轴稳定控制。
关键词:舰载雷达;伺服系统;自抗扰控制; DSP
0 引言
伺服控制系统是现代舰载雷达的重要组成部分,其控制精度、响应速度、可靠性及稳定性已成为雷达系统的关键性能指标。近年来,舰载雷达探测性能不断提高,对雷达天线转台的控制性能提出了更高的要求。为了弥补传统的PID控制算法在抗干扰方面的不足,进一步提高伺服系统的跟踪性能,本文基于自抗扰控制技术设计了一种以浮点型DSP为核心的控制系统,采用坐标变换技术实时补偿舰船摇摆姿态,完成舰载雷达方位-俯仰两轴稳定控制。
1 系统基本组成及工作原理
在方位-俯仰型两轴稳定舰载雷达天线转台中,方位轴与俯仰轴正交,伺服系统接收惯性导航系统的航向、纵摇及横摇信号,按指定的要求实现方位和俯仰两轴运动,保证雷达天线方位轴指向稳定及俯仰轴保持水平。伺服系统基本组成如图1所示。整个系统主要由方位控制和俯仰控制两部分组成。这两部分的组成基本相同,主要由控制模块、执行机构和反馈回路组成。控制模块以TMS320C6747芯片为核心,其主要功能是接收外部操控信号、姿态角信号、对反馈信号进行模数转换及编码、坐标变换、控制运算、数据编码等。执行机构由高性能数字伺服电机驱动器、伺服电机和减速机组成。反馈回路由消隙小模数齿轮组、测角电机和轴角编码器组成。

图1 舰舰载雷达转台两轴稳定伺服系统基本组成
2 控制模块的设计
由于两轴稳定系统的坐标变换涉及大量的三角函数运算,故控制模块采用浮点型DSP芯片TMS320C6747作为处理器。姿态角信号以及其他外部信号进入FPGA进行编码及电平转换。DSP读取这些信号并对其进行控制解算,将解算后的方位、俯仰控制量经双路AD转换器AD5547转换为数字量分别传送至方位、俯仰驱动器,驱动方位、俯仰电机运动。同时,还将接收到的姿态角信号以及伺服系统状态、故障信号进行编码并通过以太网模块发送到显控台。控制模块组成如图2所示。

图2 控制模块组成
3 两轴稳定闭环控制
经典PID控制广泛应用于舰载雷达伺服系统中,其控制结构简单,但存在以下几个方面的缺点:对控制增益的变化太敏感;“快速性”和“超调”不可调和;微分器很难选取;误差积分常会使闭环的动态性能变差等。针对以上缺点,本文采用的自抗扰控制器逐一给出了解决办法。所设计的自抗扰控制器分为3个部分:跟踪微分器(TD)、扩张状态观测器(ESO)和非线性状态误差反馈控制器(NLSEF)。自抗扰控制器控制结构如图3所示。
伺服系统可简化为如下二阶系统:

其中,x1、x2为系统状态变量,u为系统控制量,P为未知扰动。
TD数学表达式为[7]

其中,v为系统输入指令,v1为过渡过程的输出,v2为得到的微分,γ为调节参数,其值越大响应越快。
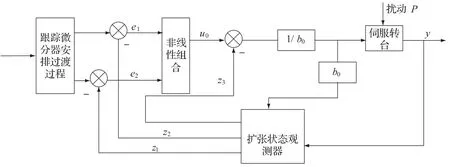
图3 自抗扰控制器的控制结构
ESO数学表达式为[7-8]

式中,z1、z3、z3为对x1、x2、P的估计,β1,β2,β3,b0均为可调参数,且满足β1>0、β2>0、β3>0、β1·β2>β3。
NLSEF数学表达式为[7-8]

其中k1>0、k2>0为可调参数。
舰载雷达转台两轴稳定伺服系统一般采用坐标变换技术在雷达天线方位和俯仰轴上对舰船摇摆姿态角(纵摇角P、横摇角R和航向角H)进行角度实时补偿,从而确保雷达天线指向稳定,在舰船地理坐标系中其方位角A和俯仰角E计算公式如下[4]:

式中,Ac为天线甲板方位角,E为天线俯仰角,A为天线真方位,Ec为天线甲板俯仰角; H为舰船航向角,R为舰船横摇角,P为舰船纵摇角。
3.1方位闭环控制
方位闭环控制原理示意图如图4所示。方位给定值与方位反馈值经过自抗扰控制器处理,其控制输出经D/A转换后送至方位驱动器,驱动天线方位按指定要求运动。其中,方位电机参数:电阻Ra=2.48 Ω,电感La=38 mH,转矩系数Km=0.848 N·m/A,反电势系数Ke= 0.489 V/rad·s-1,电机转动惯量Jm= 0.00114 kg·m2;方位转台参数:速比n = 309,负载转动惯量Jl=150 kg·m2。天线方位以30°/s的速度顺时针旋转,方位位置给定、位置反馈及控制误差如图5(图中给定sp和反馈信号y以右边界为坐标,误差信号e以左边界为坐标)所示,可见天线方位控制误差收敛迅速并趋于稳定。

图4 方位闭环控制原理示意图

图5 方位转台闭环控制
3.2俯仰闭环控制
俯仰闭环控制原理示意图如图6所示。俯仰给定值与俯仰反馈值经过自抗扰控制器处理,其控制输出经D/A转换后送至俯仰驱动器,驱动天线俯仰实时与大地保持水平。其中,俯仰电机参数:电阻Ra= 2.48Ω,电感La=38 mH,转矩系数Km=0.848 N·m/A,反电势系数Ke=0.489 V/rad·s-1,电机转动惯量Jm= 0.00114 kg·m2;俯仰转台参数:速比n =405.7,负载转动惯量Jl=170 kg·m2。舰船横摇信号:幅值20°,周期9.5 s;舰船纵摇信号5°,周期5 s。俯仰控制位置给定、位置反馈及控制误差如图7(图中给定sp和反馈信号y以右边界为坐标,误差信号e以左边界为坐标)所示,可见天线俯仰控制误差同样收敛迅速并趋于稳定。
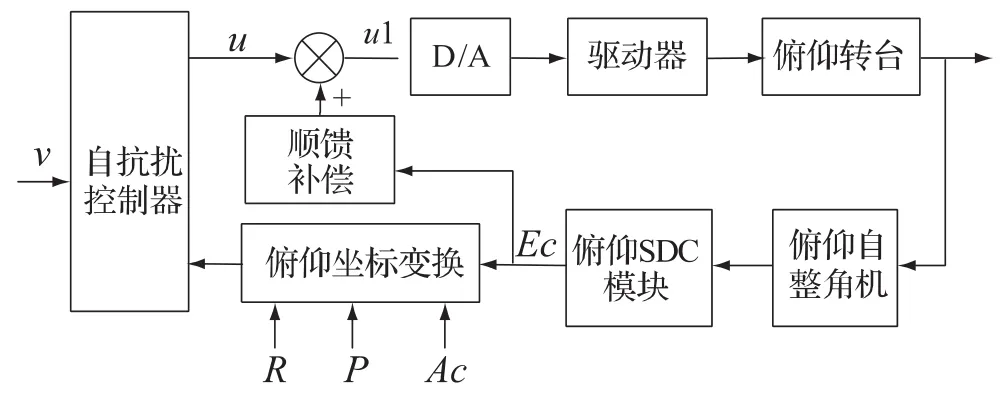
图6 俯仰闭环控制原理示意图

图7 俯仰转台闭环控制
4 结束语
本文从工程应用角度出发设计了以浮点型DSP为核心的舰载雷达两轴稳定伺服系统,具体描述了控制系统的组成和实现方法,并给出了方位和俯仰两轴稳定的控制策略以及控制效果。该伺服系统可靠性高、稳定性好、调试方便,为后续舰载雷达转台伺服系统的设计提供了一定的借鉴价值。
参考文献:
[1]TMS320C6745/6747 Floating-point Digital Signal Processor.TEXAS INSTRUMENTS,2008.
[2]Using the TMS320C6748/C6746/C6742 Bootloader.TEXAS INSTRUMENTS,2014.
[3]Powering the TMS320C6747 with the TPS650061.TEXAS INSTRUMENTS,2011.
[4]曹正才.舰载雷达常用稳定方式坐标变换[J].雷达与对抗,2010(1).
[5]曹正才,金艳艳.舰载雷达伺服系统的复合控制[J].雷达与对抗,2004(1).
[6]刘金琨.先进PID控制MATLAB仿真[M].北京:电子工业出版社,2006.
[7]张秀峰.MATLAB机电控制系统技术与应用[M].北京:清华大学出版社,2011.
[8]Y X Su,B Y Duan,C H Zheng,Y F Zhang,G D Chen,J W Mi.Disturbance-Rejection High-Precision MotionControl of a Stewart Platform[J].IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY,2004(1):364-374.
A biaxial stabilizing servo system based on ADRC technology for shipborne radars
ZHANG Jie,SUN Jin-xian,LIU Li
(No.724 Research Institute of CSIC,Nanjing 211153)
Abstract:Based on the characteristics of the biaxial stabilizing rotary platform for the shipborne radar,the control module is designed with the floating-point DSP as its core,realizing the stability control of the azimuth and elevation axes of the shipborne radar through the active disturbance rejection control(ADRC)technology.
Keywords:shipborne radar; servo system; ADRC; DSP
作者简介:张杰(1982-),男,工程师,硕士,研究方向:控制理论与控制工程;孙晋先(1983-),女,工程师,研究方向:自动化控制;刘丽(1988-),女,工程师,研究方向:控制科学与控制工程。
收稿日期:2015-03-02;修回日期:2015-03-28
文章编号:1009-0401(2015)02-0052-04
文献标志码:A
中图分类号:TN959.72
猜你喜欢
建材发展导向(2022年18期)2022-09-22
北京航空航天大学学报(2022年6期)2022-07-02
航天工业管理(2020年9期)2020-12-28
航天制造技术(2016年6期)2016-05-09
北京航空航天大学学报(2016年4期)2016-02-27