星际探索中的电子技术
2016-01-21 03:41:06耿虎军
无线电工程 2016年1期
关键词:电子技术
耿虎军
(1.中国电子科技集团公司第五十四研究所,河北 石家庄 050081;
2. CETC航天信息应用技术重点实验室,河北 石家庄 050081)
星际探索中的电子技术
耿虎军1,2
(1.中国电子科技集团公司第五十四研究所,河北 石家庄 050081;
2. CETC航天信息应用技术重点实验室,河北 石家庄 050081)
摘要各种各样的深空探测器持续地扩展着人类的认知范围。通过对几次典型深空探测活动的成败分析,总结电子技术在星际探索任务中所起到的作用,分析星际探索任务中电子设备应用所获得的经验和启示。认为电子设备的功能、性能、寿命、可靠性是星际探索任务成败的决定性因素,电子技术甚至成为了限制星际探索能力的一个瓶颈。进而论述了未来深空探测任务对电子技术发展的需求,以期对未来电子系统的研制有所借鉴。
关键词电子技术;星际探索;深空测控;激光通信;星际网络

0引言
星际探索是人类对地球以外天体和空间进行探测的活动。它通过对地球以外的行星及其卫星、小天体和矮行星以及太阳系外宇宙空间等的探测,探究太阳系及宇宙的起源与演化、太阳及小天体活动对人类生存环境的灾害性影响、太阳系生命的起源与演化等重大科学问题,为人类可持续发展服务。
深空探测活动的实施一般按照系统工程的原理进行组织,分为5大系统:深空探测器系统、运载火箭系统、发射场系统、测控通信系统和地面应用系统。从工程组织的角度,人们难以完整地理解电子技术对于星际探索任务的重要性。从学科分类的角度审视星际探索任务,可以看到电子技术渗透到5个工程组织系统中的每一个部分,并且伴随深空探测活动的整个生命周期。
1令人惊叹的深空探测任务
一直以来,人们以各种方式认识着太空,从肉眼观察发展到望远镜观察,从探测器抵近观察到人类直接登陆地。而无线电技术的发展,极大地推动着人类星际探索的进程。
1.1飞行了38年的深空探测器
2013年9月13日,美国航空航天局(NASA)宣布:旅行者一号已经离开太阳风层,正式成为第一个进入星际空间的人造物体[1]。权威专家认为进入星际空间是历史性飞跃。
旅行者一号最初目标是探测木星、土星、天王星和海王星。1977年9月5日升空,1979年2月到达木星上空,1979年11月飞到土星附近,后因增加了探测土卫六生命迹象的任务,改变轨道绕飞土卫六。在完成土星六探测后,旅行者一号没有按原定计划飞往天王星和海王星进行探测,而是直奔太阳系边缘。它飞出太阳系后的主要任务是测量宇宙光束粒子、探测太阳风和其他恒星风之间的作用。
旅行者一号有2项主要措施使其能够长时间工作:① 携带了足够多的能源,并且一旦完成了某项任务,就关闭相应的设备以节省能源;② 使用了可靠的电子器件,一直到现在它们都在稳定、可靠地工作,并且在飞跃木星时,有效地抵抗了来自木星的强烈射线辐射。
2004年,旅行者一号的定位系统出现故障,需要启用后备系统。时隔20多年之后,后备系统能否正常工作让人十分担心。转换过程中,飞行器电脑将太阳当成了地球,差点儿使飞行器和地面失去联系。幸好地面控制人员在完全启用后备系统前,设置了15 min的间隙分析数据,以决定切换是确认还是放弃。地面控制中心利用这一间隙,启用回转仪稳定飞船,最后顺利启动了后备系统。
1.2惊险迭出的“隼鸟”探测器
2010年6月13日,日本“隼鸟”深空探测器在澳大利亚的伍莫拉沙漠着陆,带回了丝川小行星1 000多个微米级的岩石微粒,这是人造飞行器首次与小行星接触后回到地球[2]。“隼鸟”重510 kg,发射于2003年5月9日,在天外漂泊了7年,飞行60亿千米,旨在验证离子推进、自主导航、采样和再入等技术。
“隼鸟”探测器任务过程中出现了很多故障,导致任务过程惊现迭出,能够返回地球是一件非常不容易的事情。
发射后,2003年一次剧烈的太阳耀斑使得“隼鸟”探测器的太阳能电池发生损坏,影响了离子推进系统,导致抵达时间推迟了2个月。2005年7月31日,“隼鸟”探测器的一个动量轮由于摩擦太大而损坏。2005年底“隼鸟”探测器在丝川小行星周围进行了约3个月的巡视勘测,在此期间,“隼鸟”探测器发生了长时间的通信中断,只能实施自主光学导航。2005年11月20日,“隼鸟”着陆丝川小行星后,与地面失去联系3 h,控制中心一度宣布“隼鸟”处于失踪状态。离开丝川后,“隼鸟”返航途中出现了多次技术故障,包括离子发动机故障、动量轮损坏、推进剂泄露、蓄电池丧失功能和通信中断等,导致回归时间推后了3年。返回地球途中,推进剂泄露导致探测器一直慢慢滚动,天线每6 min才有1 min对准地球,给通信带来巨大的困难。2009年11月最后一具发动机停止工作。“隼鸟”的离子推进系统有4个主喷管和4个小喷管,最终地面人员使用小喷管实现航向控制,使得“隼鸟”得以返航[3]。
虽然惊险跌出,“隼鸟”航天器依然向世界展示了日本的离子推进技术、小行星准确定位技术、地面—太空遥控技术、星际光学自主导航技术、自主着陆智能机器人技术和返回地球技术。尤其是一度被认为将“死于太空”的“隼鸟”号“起死回生”,展现出日本强大的太空装备遥控能力[4]。
1.3生命力顽强的古老探测器家族
2001年4月位于西班牙马德里的深空天线意外收到了一个异常微弱的信号,经查证该信号是与控制中心失去联系8个月的“先锋十号”[5]。截至2002年,“先锋十号”已经在太空中超限服务30多年,它与“旅行者1号”、“旅行者2号”和“IMP-8号”都是拒绝死亡的精英飞行器。
“先锋十号”发射于1972年3月2日,目标是探测水星。2002年3月2日,地面控制中心依然能够与它进行无线电信号的沟通。因为距离长达120亿千米,沟通一次事件长达22 h,但是“先锋十号”的回答清晰准确。2003年1月22日,NASA又一次收到“先锋十号”来自123亿千米远太空的微弱信号。
1997年,经过25年的宇宙航行之后,“先锋十号”用于和地面站之间建立联系的定向天线指向逐渐发生了偏移。重新对天线定向,使得“先锋十号”面临着巨大的风险。在定向过程中,需要反复关闭它的测控设备,以提供定向操作所需要的足够能量。反复关闭测控通信设备,可能产生热震荡,从而导致测控通信损坏。经过90 min的操作之后,迟暮之年的“先锋十号”经受住了考验,完成了天线重新定向操作。
后来发射的旅行者“长生不老”的部分原因是他们的设计参照了“先锋十号”、“先锋十一号”发回的太空环境信息。2个先锋都发现,木星的辐射带远比人们预计的密集得多。旅行者采取了充分的防辐射措施,采用能够有效防辐射的光学玻璃和电子原件。考虑到飞行器超期运行的可能,又在旅行者探测器上安装了后备运行系统,以便地面控制中心能够在必要时远程启动。
1.4迄今最先进的火星巡视器
2012年8月,迄今为止质量最大(3.257 kg)、性能最先进的火星探测器“好奇”号成功着陆火星。“好奇”号利用导航计算机、反冲推进火箭和“天空起重机”技术,实现了着陆火星方式的突破。
“好奇”号与地球的通信方式有2种:① 采用特高频(UHF)频段,通过在轨的火星轨道器中继,完成与地球的测控联系。火星轨道器主用“火星勘察轨道器”,备用“奥德赛”轨道器,同时也可以通过欧州航天局的“火星快车”进行数据中继服务。② “好奇”号采用X频段直接与地球完成测控通信,并且在“好奇”号上有2付X频段天线:1付宽波束、低增益天线和1付窄波束、高增益天线。
“好奇”号火星探测器配备很多先进的电子设备以及先进的计算机系统。美国三代火星车嵌入式计算机系统的性能比较[6]如表1所示。
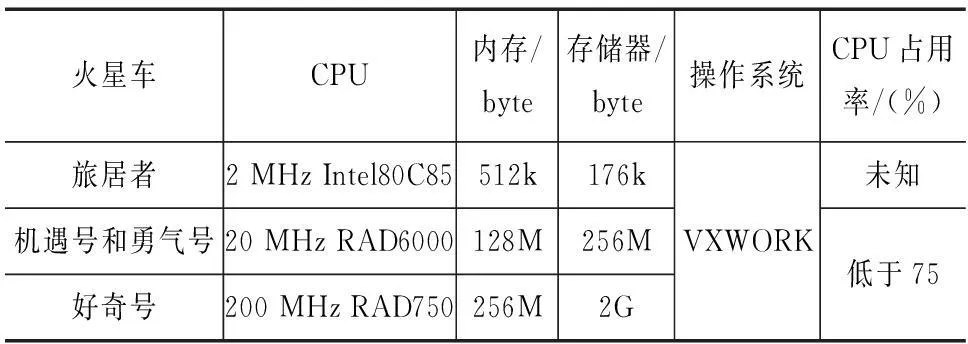
表1 美国三代火星车嵌入式计算机系统的性能比较
2深空探测任务中的电子设备
深空探测器飞出地球轨道后,电子设备发挥着举足轻重的作用,成为探测器生命延续的决定性因素,或者成为探测器起死回生的唯一手段。具体地说,它完成的工作包括:在整个飞行过程中进行高精度跟踪测量,以准确确定轨道并进行轨道机动控制和状态监视;在达到目标后进行制动和入轨等操作;在探测过程中通过深空通信系统将操作指令发给科学仪器,以控制其进行科学探测,并将所获取的科学探测数据传回地球。
伴随深空探测器整个生命历程的电子设备包括:① 电源:核电源、太阳能电池和蓄电池;② 星载计算机系统;③ 各种无线电传感器:测速、测距设备和陀螺等;④ 星载测控通信设备和天线;⑤ 大型地面测控通信设备和地面控制中心。
2.1旅行者等古老探测器给予人们的启示
未来摆在旅行者一号面前的有2个困难:
① 电力的问题。2个探测器都由钚放射性衰变产生315 W电量,电量每年都会衰减4 W左右。为节约电力,旅行者一号在探测完土星及其卫星后已陆续关闭了一些有效载荷,2020年还将关闭磁场和粒子探测设备,只留下紫外线探测设备继续工作,直到2025年核电池耗尽。在2025年以后,将收不到旅行者一号发回的科学数据,但其工程数据还将在之后几年中继续传回,它会继续以17 km/s以上的第三宇宙速度向着银河系的中心前进。
② 信号的接收问题。因为信号的强度与距离的平方呈反比,距离越远信号越弱。旅行者一号可以飞得无限远,但如果接收不到信号,那一切都没有意义。旅行者一号发回的数据要用超过17 h才能传回地球。目前发射信号的功率为23 W,相当于冰箱内灯泡的功率。现在NASA的深空测控站每天花费10 h以上的时间接收旅行者的数据。
旅行者一号现在和地球保持联系的方式是通过电磁波发送不同频率的单音信号,一个单音持续几秒钟完成一次传送。旅行者探测器上的天线口径为3.7 m,地面使用上百米口径的深空天线才能完成这样的信息收发。在旅行者一号这样的距离上,完成如此低速的通信,已经达到了目前人类通信手段的极限水平。
令人惊讶的是旅行者一号上电子设备的可靠性。在复杂的空间环境中飞行了38年之后,20世纪70年代的电子设备依然能够正常工作。这对于旅行者一号上复杂的电子设备来讲,是一件值得自豪的事情。另一个寿命更长的角色值得引起人们的注意:地面控制中心以及它的大型测控站。也许是由于它就在身边便于维护,从而不让人觉得它的长时间坚持工作使人惊讶,但它确实一直在照看着旅行者的一举一动。
2.2 “隼鸟”等航天器给予人们的启示
任务过程中,“隼鸟”的动量轮陆续损坏,地面人员通过测控链路完成飞行器的姿态调整。返航途中离子发动机故障,地面人员通过测控链路关闭了主发动机,调整程序使用平衡用的小喷管继续返航,虽然推迟了3年,但是依然返回了地球。所有这些调整工作都是地面人员通过测控通信设施得到探测器的信息,综合判断故障后,制定策略,通过测控通信设施调整探测器上的计算机程序完成的。而与此形成强烈对比的是:返途中,时断时续的测控通信限制,给返回控制增加了很多的困难;多次的通信中断,使得人们一度宣布“隼鸟”失踪。可见电子设备在延续“隼鸟1号”的生命过程中起到了多么重要的作用。
2015年6月16日欧洲航天局宣布,通过新获得的1 m分辨率火星表面图像,发现了失联10余年的“猎兔犬”号火星着陆器。图像表明,“猎兔犬”号失联的原因是太阳能电池板未能全部展开,导致和地球联系的天线未能露出,未能和地球测控网建立联系。可见,能源系统对任务来讲的重要性体现在多个方面,影响任务的方式也会多种多样。这也说明,和控制中心建立联系是非常关键的。如果“猎兔犬”号能和地面控制中心联系上,也许像“隼鸟”号一样还有救。
相关的另一个案例是“伽利略”号探测器。它的高增益主天线出现了故障,仅能利用低增益天线与地球进行通信。因此,在整个小行星Gaspra的探测过程中,仅能拍摄4幅图像。为了尽可能地提高图像中的信息量,“伽利略”号采用了创新性的图像拼接技术。事实证明,虽然仅有4幅图像可用,但依靠单帧图像拼接技术获得的天体量测信息,“伽利略”号还是获得了较高的导航精度,导航误差约为10 km,这说明与地球的测控联络就是深空探测器的生命线。
2.3目前的深空地面测控能力
2.3.1NASA的深空地面网
NASA的深空网主要由经度相隔约120°的3个基地组成,可以对深空目标实施不间断测控。这些基地装备有高灵敏度的接收系统和大型天线,每个基地至少有4类天线:34 m高效天线、34 m波束波导天线、26 m天线和70 m天线。
通过采用VLBI测量技术,NASA在火星附近探测器的位置测量能力能够达到1 km,木星附近达到几km量级,火星轨道器的轨道测量精度优于100 m。当火星和地球距离较近时,火星轨道器和地面测控站之间能够传输6 Mbps的数据。任务需求驱使NASA对深空地面网实施Ka频段改造计划,用具备Ka能力的34 m波束波导天线更换其老龄化的70 m天线,增强下行链路能力。
2.3.2ESA的深空地面网
2012年10月,欧空局(ESA)启用了在南美洲阿根廷的35 m深空测控站(编号为DSA 3),测控站天线高40 m,整体质量610 000 kg,配置了冷却到-285 ℃的低温制冷低噪声放大器,能够接收到木星轨道以远航天器返回的超微弱信号,并在不同的功率范围(最高20 kW)使遥控指令在太阳系内传播。
DSA 3与已有的澳洲西部新诺舍的DSA 1、西班牙塞布莱罗斯的DSA 2一起构成了三站一体的深空地面网,为ESA深空任务提供全球性覆盖。
2.3.3中国的深空地面网
在嫦娥月球探测任务的推动下,我国正在建设自己的深空测控网。目前,已经建成喀什35 m S/X/Ka频段深空测控站和佳木斯66 m S/X频段深空测控站。预计2017年,位于阿根廷的35 m S/X/Ka频段深空测控站将建成并投入使用。
2012年10月位于上海佘山的65 m射电望远镜天线建成并正式启用。该射电望远镜工作频率最高到Q频段(40~46 GHz),对应的观测波长范围从最长21cm到最短7 mm。2013年12月全程参加了嫦娥三号着陆器和月球车X频段VLBI测定轨测定位任务,明显提高了VLBI的测量精度[9]。
深空测控网的初步建成标志着我国的飞行器测控能力从地球周边走向星际空间。深空测控网建设过程中,所涉及到的多项核心技术走到了世界前列。不仅仅是填补了我国深空站的空白,更重要的是通过它的研制,带动了多项核心技术的发展和关键器件的研制,使我国测控通信领域从总体设计、核心技术、关键器件研制到检测测试水平,都跨上一个新台阶。
3未来深空任务中的先进电子技术
未来深空任务中,深空探测器需要充足的能源供应、性能强大的空间计算能力、高精度的环境感知与测量能力、高精度的测定轨能力、大容量的数据传输能力、连续可靠的测控联系。这些电子技术的发展都会极大地推动星际探索的进步。
3.1空间能源技术
深空探测器对空间能源系统的需求主要表现在:功率需求大、持续时间长、可靠性要求高、环境条件适应性强。星际探测可用的能源包括太阳能、核能和化学电池等。由于受到太阳光照射范围的限制,太阳能在星际探索应用中受到一些限制。罗塞塔木星探测器是最远的只靠太阳能源的航天器。猎兔犬是第一个仅靠太阳能源的火星着陆器。一些距离太阳更远的星际探索任务中只能依靠核能源。
3.1.1太阳能源技术
空间太阳能电池应具备高的体积质量效率、高能量转换效率、耐辐射、低温低亮度和高温高亮度特性优良的特点。目前,商用卫星太阳能电源系统提供的功率一般为10 kWe左右,国际空间站太阳能电源系统的功率超过了100 kWe。已经应用过的小型空间太阳能电推进系统的太阳能电池功率约为20 kWe左右。火星星球表面应用过的太阳能电源,在火星距离太阳为1个天文距离单位时,能够提供约1.5 kWe的功率。
未来深空任务中的大功率电推进探测器需要更先进的太阳能电源[8]。距离较近的深空任务,电推进系统需要提供的功率大于40 kWe;而载人火星任务的电推进系统则需要提供大于250 kWe的功率。发射时,太阳能电池的收藏态功率密度需要达到40 kW/m3,同时这些电池必须能够在穿越范艾伦辐射带时,在电推进系统产生的等离子体范围内高效工作。此外,在星际探索任务中,伴随着探测器到太阳距离的变化,光照条件和环境温度(-130~250 ℃)都有着比较大的变化,这种情况下,都要求太阳能电池具有较高的光电转换效率。
3.1.2核能源技术
放射性同位素电源系统是适合深空探测的一种不依赖于太阳的可靠能源。放射性同位素电源系统具有以下优点:寿命长;可适应各种工作条件,不受辐射影响;结构紧凑,姿态控制简单;可靠性高;动力可调;不产生噪音、振动和扭矩。因而非常适合在外层空间和行星表面的极端环境中执行任务。
深空探测任务是推动放射性同位素电源技术进步的主要动力。从1961年人们就开始在空间中使用它,一般能够做到的功率容量为3~5 We/kg,效率约6%,寿命超过30年。深空任务需要将同位素电源的效率提高到12%以上,功率容量提高到8 We/kg,寿命高于14年。
NASA计划发展的高效电源包括:采用高效热电转换器的eMMRTG-100同位素电源,输出功率100 W,效率达到10%;ARTG-500同位素电源,输出功率500 W,效率达到15%。而采用斯特林电能转换装置的ASRG-500同位素电源,输出功率100 W,效率达到30%[8]。
载人火星任务需要电源系统提供kWe级到MWe级的功率,就需要考虑空间核裂变电源、空间核聚变电源或者其他更先进的手段。
3.2空间计算技术
空间计算系统管理探测器的所有任务,包括精密着陆、躲避危险、空间对接、环境分析和科学探测等等,因此需要高能源效率、高计算能力、强抗辐射能力和高容错纠错能力,同时尽量小型化。
受限于空间计算系统的能力,以往深空任务中的处理程序逻辑关系简单、固定,现在的探测器智能化需求越来越高。探测器着陆天体时,进入、下降和着陆过程中需要连续处理视频信号、各种超光谱、综合孔径雷达等高速传感器数据;任务过程中,探测器要根据环境变化处理各种意外情况,完成模糊判断、危险评估、任务规划和故障管理等功能,要求空间计算系统具备模糊、分类和并行的计算特征。这些功能极大地增加了对空间计算系统的能力需求。
空间计算系统包括处理器、存储器、软件和通信网络等部分。多核处理器是提高计算能力和容错能力的一个技术途径。处理能力的提高也需要高密度、大容量、抗辐射的存储器。而软件是提高深空探测器自主能力的核心,它需要错误校验和恢复技术以保证飞行器功能的可靠性和安全性。高效、高速、可靠的通信网络负责连通计算系统与各种传感器和科学仪器的数据通道。
NASA的目标是发展具备24GOPS/10GFLOPS计算能力,功耗7 W,具备支持软件容错构架的多核计算架构;内存容量1 Gb,存取速度6.4 GB/s;存储器1 Gb,存取速度500 MB/sec;通信网络速率达到10 Gbps[10]。
3.3深空测控通信技术
深空测控通信设备包括探测器上的测控通信设备、空间传输与中继网络以及地面的测控通信设施。这些设备是沟通探测器与地球联系的唯一通道。
3.3.1星际互联网技术
星际互联网作为一种通用的空间信息网络架构,旨在为深空探测任务提供通信服务,为探测器和轨道器提供导航服务。将深空测控网向星际互联网转化,可以使深空内的数据传输完全自动化。当前,人们需要制定所有深空探测器的每一次测定轨和数据传输规划[11]。
2012年11月9日,NASA宣布与ESA进行了一项模拟“星际互联网”运行的实验,由国际空间站乘员利用一台电脑操控了一个欧洲太空控制中心的小型机器人。此次实验验证了通过星际“容延迟网络”(DTN),利用火星在轨卫星操控火星表面机器人的功能。
DTN协议提供了类似互联网技术的标准化通信。不同于全球互联网联接的TCP/IP协议,DTN旨在处理行星际通信期间可能突发的信号断开、错误和延迟。当航天器绕行在行星后面或遇到太阳风时,常会发生故障,导致长期间的通信延迟。
相对于传统的直接与地球通信而言,通过在火星轨道运行的航天器的中继通信解决通信难题具有重要意义。NASA的火星环球勘测者(MGS)、火星勘察轨道器(MRO)和火星奥德赛(ODY)轨道器以及ESA的火星快车(ME)轨道器构成初步的中继通信体系,这一体系已经成功地支持了好奇号、勇气号和机遇号火星表面巡视探测器。中继链路将使能量效率比深空链路提高一至两个数量级[11]。
3.3.2空间激光通信技术
2013年NASA在LADEE月球探测器上完成了月球到地球的激光通信实验,下行传输速率达到622 Mbps,上行传输速率达到20 Mbps。相对于LRO月球探测器的Ka频段数据传输系统,该实验的激光数据传输能力提高了3~6倍。该次试验验证了深空光通信中的2项关键技术:级联编码脉冲位置调制技术和超导纳米线光子技术探测器(NbN、InGaAs或WSi)技术。
空间光子探测器需要提高的性能包括:效率、抖动、抗辐射特性、饱和特性和高温工作特性等,同时需要提高大面积检测器阵列的制造成品率。要在深空中广泛使用激光作为信息传输手段,必须增加激光器的寿命(优于10年)、提高激光器的能源效率(优于30%),以适应深空探测的长时间任务需求。另外,大气的云、水汽、大气波动和大气阳光散射对激光传输的影响,也是限制激光应用的主要因素,需要有相应的技术手段克服这些困难。
激光测量系统可以达到比无线电测量系统更高的测量精度。但更高的精度也对激光系统提出了额外的要求,包括高带宽的光子检测器的响应能力、精密的测量结果标定能力以及遥控/遥测/测速/测距多功能融合的信号体制设计等[11]。
3.3.3高精度的时频产生及分发技术
未来的星际探索中发展精确导航能力至关重要。NASA的最终目的是在太阳系内实现ns量级时间同步精度[11]。太阳系内ns级的时间传递可以为深空内的探测器提供更高的位置测量精度,可以支持空间编队飞行、支持自主导航、多探测器协同、探测器抵近与维护、探测器对接等功能。其中的关键技术包括:使得空间高性能石英钟能够适应空间环境温度的变化、适应探测器磁场和电场环境、适应空间引力影响以及空间辐射影响;降低空间原子钟的复杂度和成本,同时提高空间原子钟的性能;建立高精度的空间时频传输网络,其中的关键技术包括:时频分布机制、误差测量与估计方法、误差补偿与控制机制、高效网络拓扑结构等[16]。
NASA正致力于研发“深空原子钟”(DSAC),一个小型化汞离子原子钟,其稳定性比当前最好的导航原子钟高几个数量级。一方面,深空原子钟的应用可以提高科学探测精度:通过使用单向无线测量链路,使在太阳系遥远星体的导航、重力学、掩星学准确度提高10倍,并提高航天器精确地进入轨道或着陆在其他天体上的能力;另一方面,深空原子钟的应用使深空测控转向更灵活、扩展性更强的单向无线导航体系,实现多任务共享测控网天线基础设施,降低使用深空测控网的任务成本。
目前的时间保持和授时分发精度需要几个数量级的改进,以提供更精密的星际测量数据。2010年英国国家物理实验室利用光梳实现86 km光纤距离传输的超稳定的微波频率传输系统。从远端测量得到的时频传输系统自身的频率稳定度达到4×10-17/1 600 s,时间抖动仅为64 fs。
3.3.4空间射频技术
射频一直是深空测控的主要支柱,将来仍将是深空测控通信体系结构的重要组成部分。未来的深空探测任务需要提高2个量级的下行数据接收能力(达600 Mbps),大幅度地提高上行数据传输能力,发展创新型的手段解决应急测控问题,以提高深空任务的安全性,解决地球再入时的黑障通信难题[7]。
在空间段提高深空远距离测控通信性能的技术包括:① 空间高效功放技术,如高功率行波管放大器和分布式固态功放,行波管放大器效率提升到70%~75%,重量降低到4 kg。固态功放的效率提升到35%~40%,重量降低到1~2 kg;② 空间载大天线技术,如口径大于5 m的可展开网眼天线或具有形状记忆功能的聚合体微波天线面;③ 高效率调制和编码技术;④ Ka频段空间射频应用;⑤ 空间射频小型化技术。
在地面段,提高深空远距离测控通信能力的技术有大口径天线技术、天线组阵技术、大功率发射机技术和制冷接收机技术。
(1) 大口径天线技术
提高人们与探测器沟通能力比较快的途径是在地球上修建更大口径的天线。我国正在进行FAST射电望远镜的建设,它是世界最大单口径射电望远镜[12]。另外,我国正在筹划新疆奇台110 m世界最大的全向可转动射电望远镜,工作频段覆盖150 MHz~115 GHz,可用于支持深空探测器的数据接收[13]。
(2) 天线组阵
由于体积、结构、加工、重量和安装等各方面的限制,地面站单个天线的口径不可能无限扩大。利用大量较小口径天线进行组阵以增加等效天线口径是一种可行办法。NASA在深空探测任务中多次采用了天线组阵技术。比如在旅行者二号探测海王星期间,NASA利用国家射电天文台甚大阵的27个直径25 m的天线,与戈尔德斯顿深空站的1个70 m、2个34 m天线进行组阵,以21.6 kb/s速率接收了从海王星传回的一些旅行二号拍摄的高品质图像[14]。
我国也在积极进行天线组阵的技术验证。在嫦娥工程的CE5-T1任务中,使用4个12 m天线接收数传信号,在Eb/N0约为1.3 dB时,合成效率达到99.8%。嫦娥工程CE2任务中,利用VLBI的4个天线做异地合成实验,在平均Eb/N0<1 dB时,合成效率达到99.23%。对于大规模天线组阵系统来说,单个天线接收信号十分微弱,这对信号合成技术提出了更高的要求。
在研究实践下行天线组阵技术的同时,我国也在积极进行上行天线组阵技术研究及实践。更高的上行链路的传输能力对于未来任务操作很重要,尤其是对于异常情况下的任务操作,可以通过提高发射功率或研制上行链路天线阵的方法解决这个问题。Ka等高频段上行组阵的技术困难包括:各天线传输路径中大气延时随时在变化、天线运动过程中的相心变化、电子设备的时延变化和各天线间的时频同步变化,这些变化的补偿精度直接影响上行组阵的空间合成效率和开环持续工作时间。上行天线组阵要求时频同步精度能够达到ps量级,实验中达到了优于1 ps的精度要求[15]。
(3) 大功率发射机
发射机是深空探测地面站重要的组成部分,是实现上行能力扩展的关键设备。目前的深空发射机,ESA在S及X频段达到20 kW输出功率[16],俄罗斯在X、C、P频段的输出功率分别达到40 kW、50 kW、200 kW[17],NASA在S、X频段最大输出功率分别可达400 kW、100 kW,NASA行星雷达系统X频段连续波发射机输出脉冲功率达到1 MW[18],日本在S及X频段达到40 kW输出功率[19]。
未来的深空任务中,需要5 kW以上的Ka频段连续波发射机提高上行传输能力,需要X频段350 kW~2 MW功率的应急发令、需要几MW的脉冲发射机来完成太阳系边界及星际飞行通信。
(4) 制冷接收机
接收机前端工作在低温环境,能够有效降低接收系统的噪声温度,提高系统的接收能力。目前噪声最小的器件是行波脉泽放大器(TWM),它能把沿调谐红宝石晶体长度传播的信号放大。TWM中的噪声取决于宝石晶体的物理温度,深空网中的这些晶体工作在4.2 K的液氦池中。
目前深空网用的较多的是冷却到约15 K的高电子迁移率晶体管(HEMT),虽然指标稍差,但将HEMT冷却到15 K的制冷设备要比TWM制冷设备简单得多。国内Ka波段整体馈源制冷低温接收机噪声温度小于45 K[20]。
4结束语
星际探索任务具有距离远、信号微弱、任务时间长、工作过程复杂、环境条件复杂、未知因素多的特点。因为这些特点,对参与任务的电子设备提出了很多苛刻、甚至看上去不可能达到的要求。正是这些新要求,推动了电子技术在理论、设计、材料、工艺、加工和可靠性等各个方面的发展,取得原来不可想象的技术进步。
参考文献
[1]刘悦.飞的最远的旅行者-1[J].国际太空,2013(11):1-4.
[2]快讯.日本成功回收“隼鸟”号小行星探测器的返回舱[J].飞行器测控学报,2010,29(3):20-24.
[3]袁崇焕.“隼鸟”历险记——日本“隼鸟”号飞船探测小行星纪实[J].探索,2005(12):15-22.
[4]顾风.日本“隼鸟”成功着陆[J].决策与信息,2010(8):7.
[5]杭燕玲.飞行器拒绝死亡[J].大自然探索,2002(11):2-5.
[6]张扬眉.性能优异的美国“火星科学实验室”[J].国际太空,2011(11):17-23.
[7]NASA.NASA Technology Roadmaps:Communication and Navigation Final[DB/OL].(2015-05)http://www.nasa.gov/sites/default/files/atoms/files/2015_nasa_technology_roadmaps_ta_5_communication_navigation.pdf 2015 NASA Technology Roadmaps TA 5.
[8]NASA.NASA Technology Roadmaps:Space Power Energy Storage Final[DB/OL].(2015-05)http://www.nasa.gov/sites/default/files/atoms/files/2015_nasa_technology_roadmaps_ta_3_space_power_energy_storage.pdf 2015 NASA Technology Roadmaps TA 3.
[9]刘庆会.天马望远镜在嫦娥三号测定轨VLBI观测中的应用分析[J].中国科学:物理学 力学 天文学,2015(3):1-9.
[10]NASA.NASA Technology Roadmaps:Modeling Simulation Final[DB/OL].(2015-05) http://www.nasa.gov/sites/default/files/atoms/files/2015_nasa_technology_roadmaps_ta_3_space_power_energy_storage.pdf 2015 NASA Technology Roadmaps TA 11.
[11]王奔.太阳系边界的探索-记艾德·斯通36年的“旅行者”计划心路[J].世界科学,2013(9):48-51.
[12]庄芳.世界最大单口径“天眼”首个反射面单元成功拼装[N].河北日报,2015-08-03(1).
[13]王娜.新疆奇台110射电望远镜[J].中国科学:物理学 力学 天文学,2014(8):783-794.
[14]BAGRI D S.Pros and Cons of Using Arrays of Small Antennas Versus Large Single-Dish Antennas for the Deep Space Network[R].IPN PR 42-174,Jet Propulsion Laboratory,Pasadena,California,2008:1-14.
[15]李晶.反馈控制器对频标传递系统的性能研究[J].无线电工程,2015,45(4):12-15.
[16]MARTIN R,WARHAUT M.ESA′s 35-meter Deep Space Antennas at New Norcia/Western Australia and Cebreros/Spain[C]//Aerospace Conference,2004:1 124-1 133.
[17]李平,张纪生.俄罗斯深空测控通信技术的发展及现状[J].电讯技术,2003(4):1-8.
[18]FREILEY A J,CONROY B L,HOPPE D J.Bhanji A.M.Design Concepts of a 1 MW CW X-band Transmit/Receive System for Planetary Radar[J].Microwave Theory and Techniques,IEEE Transactions on,1992(6):1 047-1 055.
[19]汪桂华.日本深空探测与深空测控技术[J].电讯技术,2003(3):1-5.
[20]王自力,刘敏.Ka频段低温接收机[J].飞行器测控学报,2014(3):225-230.
[21]吴伟仁,董光亮,李海涛.深空测控通信系统工程与技术[M].北京:科学出版社,2013.

耿虎军男,(1971—),硕士,研究员,毕业于西安电子科技大学信息与通信工程专业,中国电子科技集团公司第五十四研究所副总工程师,总装导弹航天测控通信专家组专家,全国“五一”劳动奖章获得者。主要研究方向为航天测控专业,从事航天测控关键技术和系统总体研究。
参加过多项国家重大工程的测控设备研制工作,包括:载人航天工程、北斗导航工程、嫦娥探月工程、中继卫星工程、风云二号气象卫星工程、风云四号气象卫星工程等,担任多个地面测控系统的总设计师。获得国防科工局“科学技术进步奖”二等奖、集团公司“科学技术奖”特等奖等多个奖项,获得国防科技工业局探月工程三期论证优秀个人称号。
引用格式:耿虎军.星际探索中的电子技术[J].无线电工程,2016,46(1):1-7,49
Electronic Technology Throughtout Interstellar Exploration
GENG Hu-jun1,2
(1.The54thResearchInstituteofCETC,ShijiazhuangHebei050081,China;
2.CETCKeyLaboratoryofSpaceInformationApplicationTechnology,ShijiazhuangHebei050081,China)
AbstractA variety of deep space explorers are widely enlarging the cognition range of human being.By analyzing the success and failure of several typical deep space exploration activities,this paper summarizes the role of electronic technology in interstellar exploration missions,and analyzes the experiences and revelations from electronic equipment application.The function,the performance,the lifetime and the reliability are the factors determining the success or failure of the interstellar exploration missions.The electronic technology has even become a bottleneck in limiting the exploration capability.Finally,this paper discusses the requirements of electronic technology in future deep space exploration mission.
Key wordselectronic technology;interstellar exploration;deep space TT&C;laser communication;interstellar network
作者简介
收稿日期:2015-10-12
中图分类号TN923
文献标识码A
文章编号1003-3106(2016)01-0001-07
doi:10.3969/j.issn.1003-3106.2016.01.01
猜你喜欢
职业·下旬(2016年10期)2016-12-02 22:05:42
职业·中旬(2016年10期)2016-11-28 20:32:33
东方教育(2016年17期)2016-11-23 09:35:08
艺术科技(2016年9期)2016-11-18 20:10:50
艺术科技(2016年9期)2016-11-18 20:10:26
艺术科技(2016年9期)2016-11-18 19:51:43
电子技术与软件工程(2016年18期)2016-11-14 01:56:58
课程教育研究·学法教法研究(2016年21期)2016-10-20 19:00:46
电脑知识与技术(2016年21期)2016-10-18 22:17:51
中国新通信(2016年16期)2016-10-18 10:54:28