对称三角波调频定高引信设计与仿真
2016-01-21 03:41:36刘秋生彭朝琴
无线电工程 2016年1期
马 驰,刘秋生,彭朝琴
(1.北京航空航天大学 自动化科学与电气工程学院,北京 100191;
2.军械工程学院,河北 石家庄 050003)
对称三角波调频定高引信设计与仿真
马驰1,刘秋生2,彭朝琴1
(1.北京航空航天大学 自动化科学与电气工程学院,北京 100191;
2.军械工程学院,河北 石家庄 050003)
摘要调频定高引信是一种采用调频连续波测距基本原理,实现在某确定高度引爆弹药战斗部的近炸引信。由于弹药末端的较大落速,会在近炸引信的信号处理过程中引入多普勒频移,从而使定高引信产生误差。基于对称三角波调制的连续波体制,对差频信号采样后利用快速傅里叶变换,计算得到回波信号相对于发射信号的频率偏移,并以20~100 m为例,对定高引信进行了设计与仿真,并对高速再入环境下的定高精度、抗噪性能做出分析。仿真结果声明,采用对称三角波的调频定高引信能够避免多普勒效应的影响,实现精确定高。
关键词定高引信;调频连续波雷达;对称三角波调制;多普勒效应

0引言
随着军事技术的发展,远程、精确及高效成为了现代战争的重要特征。为发挥弹药杀爆战斗部的最大效能,精确定高起爆是一种最重要的形式。以远程火箭类弹药为例,其末端速度大约为2~3马赫,如要求在20~100 m装定,精度应不大于5 m,这对高速环境下的精确定高引信提出了很高要求。
调频连续波(FMCW)体制雷达具有结构简单、低发射功率、低截获性、高距离分辨力、大时间带宽积、高灵敏度以及高抗有源干扰等优点,在航空领域得到广泛的应用[1,2]。由于芯片技术的进步,FMCW雷达单片微波集成电路尺寸低至2 mm×3.5 mm[2,3];并且,对于频率的测量可以使用快速傅里叶变换(FFT)以数字形式来完成[4],精确度和实时性得到大幅提高[5],适合应用于弹载定高引信。
定高引爆战斗部或炸弹等,通常处于高速再入环境[6],较大下落速度所引起的多普勒频移会对定高精度造成影响。论文利用对称三角波调制的测距测速特点[7,8],以FFT算法对频率进行测量,对设计定高20~100 m、可在高速再入环境下精确定高的引信展开研究。
1FMCW定高引信定高原理
由于无线电信号在空间中传播速度可近似视为恒定,通过测量出信号的传播时间,便可以计算出信号传播经过的路程。假设信号在空间中的传播时间为t,则信号经过的路程S满足:
S=c×t。
(1)
式中,光速c≈3×108m/s 。
定高引信通过测量接收到的回波脉冲相对于发射脉冲的延迟时间Td,计算得到弹药相对于地面的高度H为:
(2)
因此,定高引信对于高度的测量就转变为对延迟时间的测量。
FMCW是频率以一定规律变化的连续无线电波,其频率调制规律在原理上可以是任何形式的,但通常采用正弦波、对称三角波和锯齿波作为调制信号。为消除多普勒效应对于测高的影响,本系统采用对称三角波调制,调制规律如图1所示。
图1 对称三角波调制
图1中,实线所示为发射信号频率ft(t),虚线为经过时延的回波信号频率fr(t),Δf为调制频偏,Tm为调制周期,Td为延迟时间,fb+为前半调制周期回波信号频移,fb-为后半调制周期回波信号频移。当弹药具有竖直方向的下落速度时,雷达高度表的回波信号会产生向上的多普勒频偏fd[9]满足:
fd≈2vf0/c。
(3)
式中,v为竖直方向下落速度;f0为载波频率。
由图1可以看出,fb+与fb-满足[10]:
(4)
式中,Δfb为回波信号因时间延迟而产生的频移。由式(4),在测量出fb+与fb-后可以计算得到Δfb与fd,进而可由式(3)反解出弹药下落速度;也可根据调制规律,计算得到延迟时间,从而得到弹药的真实高度H为:

(5)

(6)
2定高引信设计方案
系统由压控振荡器(VCO)、放大器、收发天线、混频器、滤波电路和计算器组成。计算器将根据调制规律产生调制信号,控制VCO生成频率以对称三角波形式变化的射频信号。射频信号通过功分器分为2路信号:一路经过放大器后作为发射信号由天线发射出去,另一路引入混频器的一个输入端。回波信号是发射信号经过延迟和衰减,并且叠加了高斯白噪声的信号,经过放大后引入混频器的另一输入端。
混频器的输出信号频率为2个输入信号频率之差。混频器输出信号经过低通滤波,得到频率为回波信号与发射信号的频率差的差频信号,分别对前半、后半调制周期差频信号进行采样,再经过FFT运算后,拾取最大谱值点,得到fb+与fb-,进而解算出弹药真实高度。系统原理框图如图2所示。
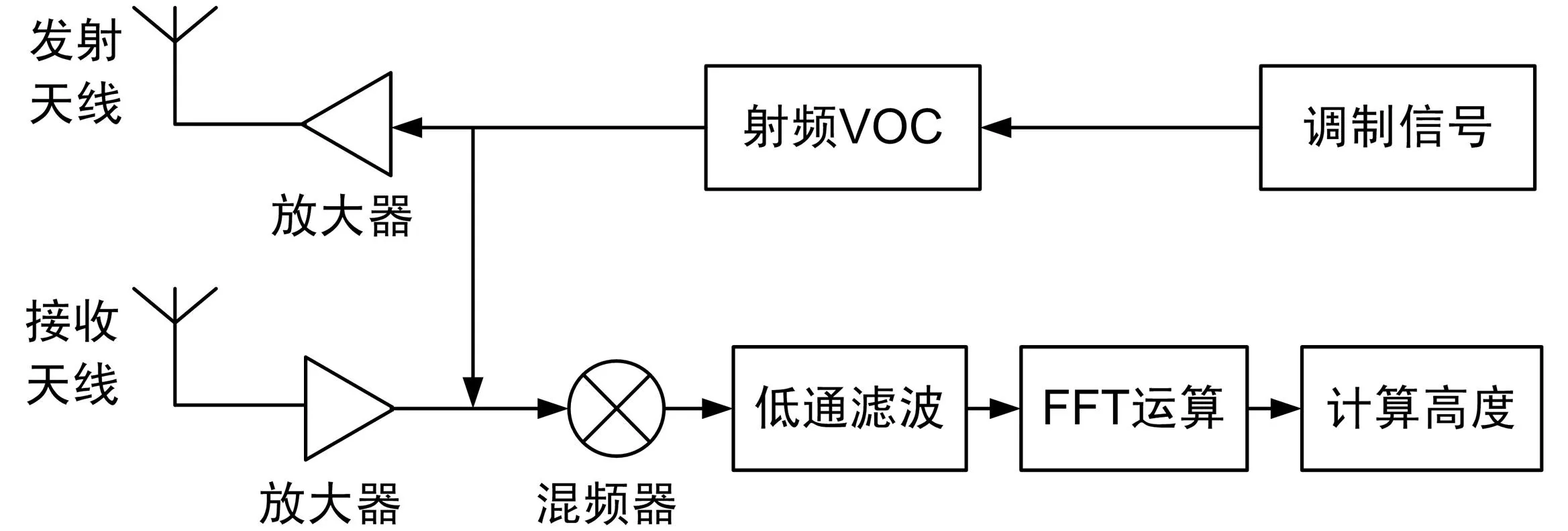
图2 系统原理
系统设计定高为20~100 m,定高误差为±2 m。调制频偏越高定高精度越好,但由于VCO性能的限制,选定调制频偏45 MHz。在设计最大高度100 m时,回波信号延迟时间为0.667 μs,调制周期应远大于最大回波延迟时间,选定为400 μs。FFT点数N越大系统分辨率越高,但计算量会大幅增加,对系统实时性造成影响,综合选定为1 024。

3仿真结果与分析
以Matlab为仿真平台,若高度为20 m,下降速度1 000 m/s为例,详细介绍此状况下的仿真结果。首先,系统通过压控振荡器生成载频为2.4 GHz,调制频偏为45 MHz,调制周期为400 ns的本振信号,经过放大后作为发射信号由天线发出。
发射信号经过时延和衰减并叠加高斯白噪声,被天线接收成为回波信号。将放大的回波信号与本振信号输入混频器,得到差频信号。回波信号信噪比为-6 dB时的差频信号如图3所示。
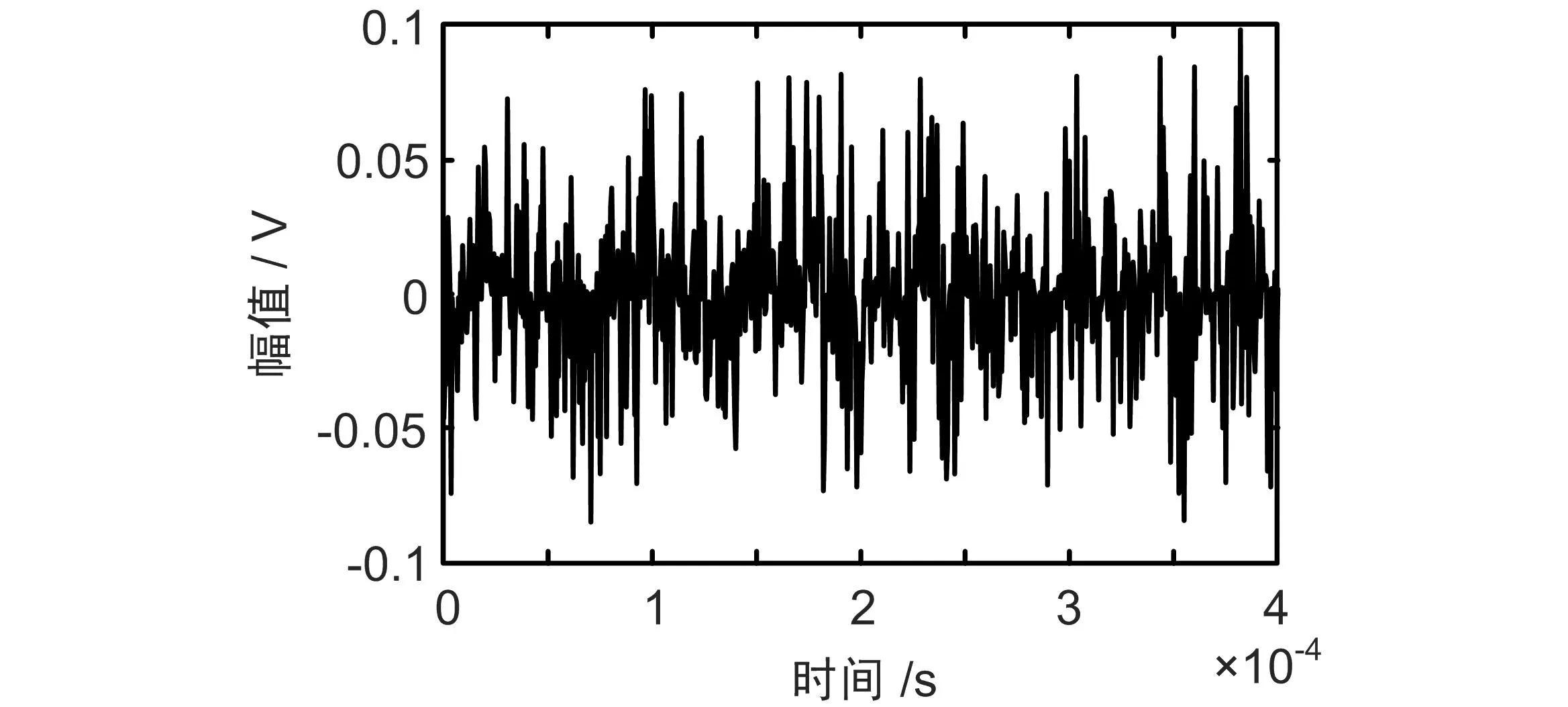
图3 差频信号(回波信号SNR=-6 dB)
将差频信号通过归一化截止频率2/3的FIR加窗低通滤波后,分别对前半调制周期和后半调制周期的滤波后差频信号采样,并进行FFT运算,得到的差频信号频谱如图4和图5所示。拾取最大谱值点后,将fb+与fb-带入式(6),得到测高与测速结果。
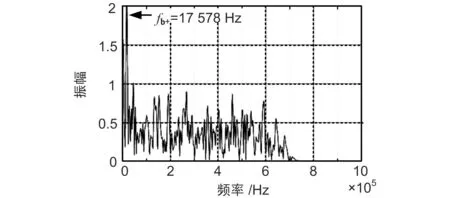
图4 前半调制周期滤波后差频信号FFT
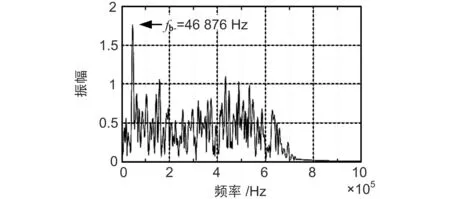
图5 后半调制周期滤波后差频信号FFT
表1列出了1 km/s下落速度、3种信噪比情况下,定高引信在5个高度点上的测高结果。从表1可以看出,随着信噪比的降低,fb+与fb-的频谱逐渐淹没在噪声频谱中,在-9 dB信噪比下系统开始出现提取fb+与fb-误差,造成系统不能准确测高。系统在-6 dB以上信噪比均能精确测量真实高度。
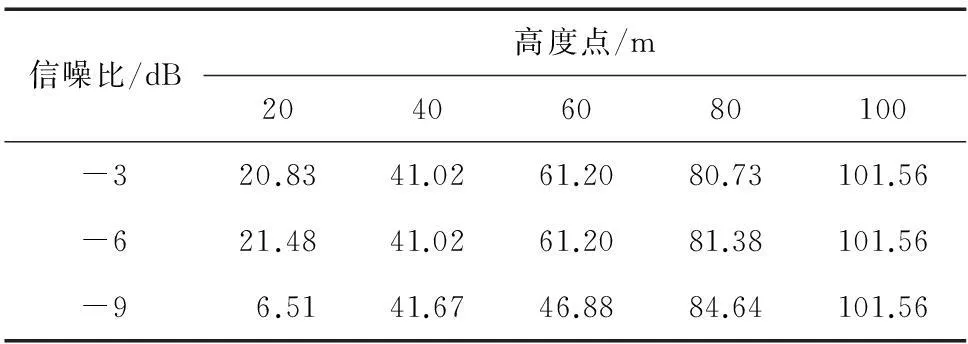
表1 不同信噪比下的测高结果 (单位:m)
从表1中可以看出,在各高度位置所设计的定高引信都具有较高的测量精度,满足定高精度要求。而且从不同信噪比状况下来看,采用FFT从频域来进行信号处理,也使本定高引信都具备了较高的抗噪能力。
表2列出了信噪比-6 dB,以不同速度下落时,定高引信在20 m高度点上的测高、测速结果,另外列出了是用只根据前半调制周期差频信号进行高度测量的原始方法的测高结果。

表2 在20 m高度下,不同下落速度时的测高测速结果
从表2中可以看出,本定高引信测速精度不高,但通过利用对称三角波调制的特点,测量信号频率上升阶段和下降阶段回波信号的频移平均值,较好地消除了多普勒效应对测高的影响,实现了高速再入环境下的精确测高,相对于原始方法具有明显优势。
从系统仿真结果来看,其具有正方向1 m左右的固有定高误差,对于定高精度影响较小,满足设计要求。此正方向的微小高度误差,可以为系统计算高度,和引信点火预留出一部分时间。若要消除或减小此固有定高误差,可以将测高结果减去1 m,使测高结果在真实值±0.5 m处波动。
4结束语
设计和仿真了采用对称三角波调制的连续波定高引信,通过平均回波信号前半调制周期与后半调制周期相对于发射信号的频移,较好地消除多普勒效应的影响,实现了弹药在高速再入环境下的有效定高。由于采用快速傅里叶算法,以数字信号处理方法对回波信号频移进行结算,使得系统具有较高的测高精度与较好的抗噪能力。在测量高度的同时,也可以解算出弹药的下落速度,但精度较低。可以通过增大载波频率的方法改善测速精度。
参考文献
[1]徐小平,刘建新,韩宇,等.FMCW测距雷达数字信号处理器设计仿真[J].信息与电子工程,2004,2(2):133-135.
[2]STOVE A G.Linear FMCW Radar Techniques[J].Radar and Signal Processing,1992,139(5):343-350.
[3]TESSMANN Axel,KUDSZUS Steffen.Compact Single-chip W-band FMCW Radar Modules for Commercial High-resolution Sensor Applications[J].Microwave Theory and Techniques,2002,50(12):2 995-3 001.
[4]宋玮.FMCW雷达测距精度及其信号处理技术的研究[D].南京:南京理工大学,2004.
[5]杨毅.FMCW雷达高度表数字信号处理技术研究[D].绵阳:中国工程院物理研究院,2009.
[6]刘建新.脉冲及脉间二相编码雷达高度表信号处理方法研究[D].成都:电子科技大学,2004.
[7]蒋留兵,林和昀,沈翰宁,等.基于 DSP 的防撞雷达系统设计与实现[J].工程应用技术与实现,2012,38(12):255-257.
[8]秦国连.FMCW雷达高度表多普勒效应的误差分析[J].制导与引信,1995(3):40-45.
[9]鲍吉龙,应延治,赵洪霞,等.基于DSP技术的防撞汽车雷达[J].微计算机信息,2006,22(4-2):188-190.
[10]盛怀茂,夏冠群,孙晓伟,等.FMCW毫米波防撞雷达系统[J].电子产品世界,2001(2):58-59.

马驰男,(1990—),硕士研究生。主要研究方向:调频连续波雷达及其信号处理。
刘秋生男,(1967—),教授。主要研究方向:仪器科学与技术。

引用格式:马驰,刘秋生,彭朝琴.对称三角波调频定高引信设计与仿真[J].无线电工程,2016,46(1):61-64.
Design and Simulation of Symmetrical Triangle Wave
Modulation Altimeter Fuze
MA Chi1,LIU Qiu-sheng2,PENG Zhao-qin1
(1.SchoolofAutomationScienceandElectricalEngineering,BeihangUniversity,Beijing100191,China;
2.PLACollegeofOrdnanceEngineering,ShijiazhuangHebei050003,China)
AbstractThe frequency modulation altimeter fuze is a kind of proximity fuze which makes use of basic principles of frequency modulation continuous wave ranging to detonate warhead of ammunition in a given height.Due to the large fall velocity of ammunition,the Doppler frequency shift is introduced in the signal processing,so errors of altimeter fuze are generated.Based on symmetrical triangle wave modulated continuous wave,taking 20~100 m as an example,the altimeter fuze is designed and simulated by using fast Fourier transform after sampling the beat frequency signal and calculating the frequency shift of echo signal with respect to transmitted signal.And the precision of height measurement and anti-noise performance in large fall velocity are analyzed.The simulation results show that the altimeter fuze using symmetrical triangular wave modulated continuous wave can avoid the influence of Doppler effect to achieve high-precision height determination.
Key wordssaltimeter fuze;FMCW radar;symmetrical triangle wave modulation;Doppler effect
作者简介
基金项目:国家自然基金青年基金资助项目(61305131)。
收稿日期:2015-09-08
中图分类号TJ434.1
文献标识码A
文章编号1003-3106(2016)01-0061-04
doi:10.3969/j.issn.1003-3106.2016.01.15