
手动式冲孔打桩机自动化改进及稳定性研究
2016-01-19 01:40:301,1,1,2,1
机械与电子 2015年10期
1,1,1,2,1
(1.西安工业大学电子信息工程学院,陕西 西安 710021;2. 海军驻西安地区军事代表局,陕西 西安 710056)
Improvement of Automation and Study of Stability for Manual Punching Pile Driving Machine
QIN Gang1,ZHOU Zhendong1,LIU Weiqian1,LIU Qian2,CHEN Zhongxiao1
(1.Xi’an Technological University, School of Electronics and Information Engineering,Xi’an 710021,China;
2. The Navy in Xi’an Area Military Representative Office, Xi’an 710056,China)
手动式冲孔打桩机自动化改进及稳定性研究
秦刚1,周振东1,刘玮倩1,刘千2,陈忠孝1
(1.西安工业大学电子信息工程学院,陕西 西安 710021;2. 海军驻西安地区军事代表局,陕西 西安 710056)
ImprovementofAutomationandStudyofStabilityforManualPunchingPileDrivingMachine
QINGang1,ZHOU Zhendong1,LIU Weiqian1,LIU Qian2,CHEN Zhongxiao1
(1.Xi’anTechnologicalUniversity,SchoolofElectronicsandInformationEngineering,Xi’an710021,China;
2.TheNavyinXi’anAreaMilitaryRepresentativeOffice,Xi’an710056,China)
摘要:通过对传统手动式冲孔打桩机进行机械改装,采用飞思卡尔公司生产的MC9S12XS128芯片作为微控制器,添加气动装置,通过相关传感器检测冲孔打桩机的工作状态;同时通过对FFT算法、余绳最优控制算法和专家系统等控制算法进行研究,以保证改进后的自动冲孔打桩机工作时的稳定性和可靠性。
关键词:冲孔打桩机;自动化改进;FFT;专家系统;稳定性
中图分类号:TP23
文献标识码:A
文章编号:1001-2257(2015)10-0038-04
收稿日期:2015-04-20
基金项目:陕西省科学技术研究发展计划项目(2014K05-44)
Abstract:In this paper, the traditional manual punching pile driving machine is improved. Using MC9S12XS128 produced by Freescale Semiconductor as core controller, adding pneumatic device, using a variety of sensors to test the working condition of the machine. At the same time, this paper through researching on FFT algorithm, optimal control algorithm of residual rope and expert control system and other control algorithm to ensure the stability and reliability of improved automatic punching piling machine when it works.
作者简介:秦刚(1968-),男,陕西西安人,教授,研究方向为电子工程、电子仪器与检测;周振东(1987-),男,陕西安康人,硕士研究生,研究方向为控制工程。

Keywords:punchingpiledrivingmachine;improvementofautomation;FFT;expertsystem;stability
0引言
传统冲孔打桩机包括卷扬机、刹车操纵杆、离合操纵杆、桩架、桩锤等,都是手动式操作,需要施工人员在工作过程中频繁拉动离合和刹车操作杆来控制卷扬机,从而控制桩锤的提升与降落。传统冲孔打桩机对施工人员有极高的要求,劳动强度大,安全系数低,操作复杂,施工质量难以保证。因此,对手动式冲孔打桩机进行自动化改进设计并且保证其高效稳定运行是研究的关键。
1系统整体设计方案
在打桩机工作过程中,由于桩锤的提升与下降动作迅速、剧烈,要求设计人员对整个过程的各个环节都必须清楚,需要制定出细致的设计思路,系统的总体设计思路如图1所示。
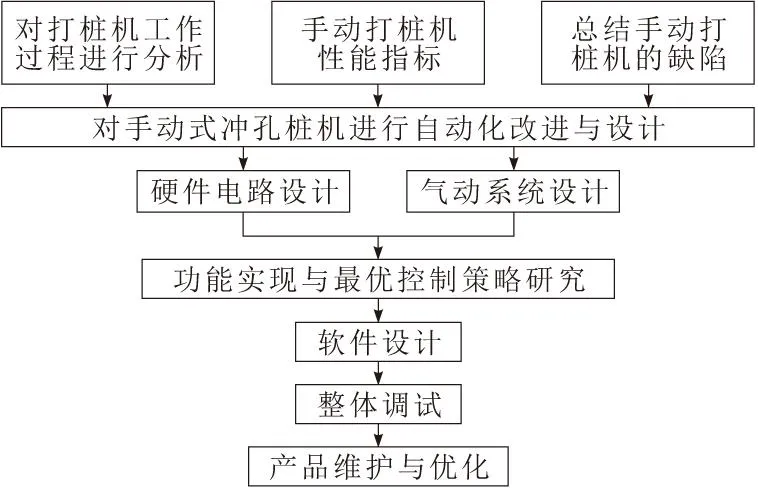
图1 手动式冲孔打桩机自动化设计总体思路框图
2机械改进
2.1 进行气动改进
对手动式冲孔打桩机进行自动化改进,关键是对离合和刹车系统进行改进。传统手动式打桩机是通过人工手动拉动离合操纵杆和刹车操纵杆来控制桩锤的提升与降落,通过添加气动装置来实现对离合和刹车的控制。
气动控制原理如图2所示,空气压缩机是整个气动系统的气源,从空气压缩机出来的气体,经过油水分离器过滤为相对纯净的空气,由一个三通管分为两路,分别连接一个调压阀,用来调节控制离合和刹车的气压,然后再分别连接一个排气阀,用来实现自动和手动的切换。在排气阀后连接电磁阀,单片机可以控制电磁阀的通断来控制气路的方向,从而控制离合气缸和刹车气缸的行程,由此实现了对离合和刹车的自动控制。
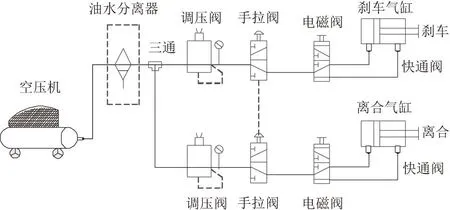
图2 气动控制原理
2.2 传感器的选择
合适的传感器的选择是对冲孔打桩机运行状态及相关指标检测的关键。通过检测电流互感器二次侧电流值的变化来检测桩锤在提升瞬间电机电流的变化(即起锤信号)。
传统手动式冲孔打桩机在提起桩锤过程中,需要现场施工工人用肉眼观测估算桩锤被提起的高度,而经自动化设计与改进后,利用增装适合的传感器来检测桩锤的提升高度,还可用来检测桩锤在提升或下降过程中是否被卡住(即卡锤故障)。
2.3 控制柜、电机保护等辅助设备的设计
打桩机施工现场环境复杂,常常伴随着有泥浆和油污,且电路板信号的稳定性容易受到外界电磁干扰的影响,因此要对主控电路板、气阀等易受外界因素影响的部件进行保护。设计了一种控制柜,将主控电路板和一些相关部件全部安装在控制柜里。控制柜采用工业现场常用的1.2mm的铁板作为原材料,这种厚度的铁板有一定的承重能力,方便对其进行攻丝。合理的外观设计,便于工作人员搬运安装与维修,同时也是一个很好的屏蔽装置。
由于施工现场采用的是45kW的卷扬机,一旦发生故障,后果不堪设想,一次需要安装继电保护装置来对其进行保护。
3硬件电路设计
通过对自动冲孔打桩机的实现功能分析,设计其硬件原理框图如图3所示。选用Freescale公司生产的MC9S12XS128作为主控制芯片[10]。
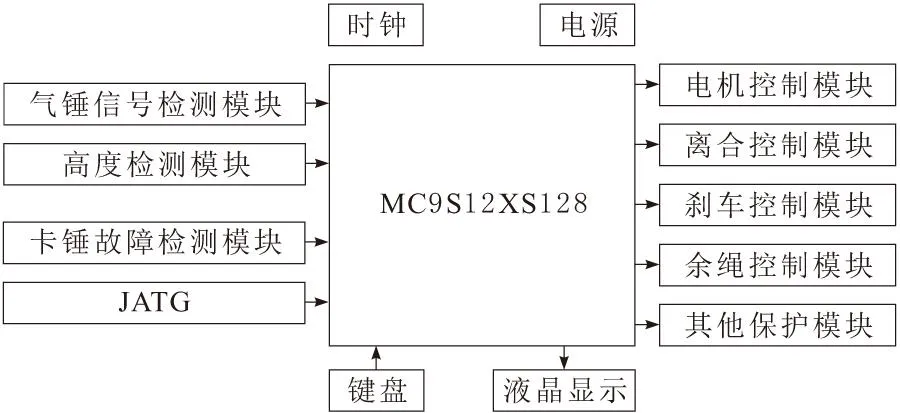
图3 硬件原理框图
手动式冲孔打桩机经自动化改进后的硬件电路部分主要包括主控部分、信号采集部分、控制量输出部分、人机交互部分及保护部分等。
人机交互包括键盘和液晶显示,用来对打桩机的运行状态进行实时地调整,例如调整打桩机的余绳长度、桩锤的提升高度、刹车时间及离合时间等。
a.主控制器的选择。选用飞思卡尔半导体公司生产的16位处理器MC9S12XS128为核心控制芯片。
b.电源。在设计系统中,有多种电压,分别为直流3V、5V、24V和交流220V几种。其中3V为纽扣电池,为时钟芯片提供电压;5V为微控制器等大部分集成芯片供电;24V为外围接口电路供电,主要为电机继电器、电磁阀、霍尔传感器等供电。
c.起锤信号检测。利用电流互感器,通过检测其二次侧电流来实现对起锤信号的检测,在起锤信号检测电路中需要进行整流、滤波等处理。
d.刹车、离合控制。刹车、离合控制电路主要是采用三极管9013和光耦器件PC817搭建起来的开关电路。当打桩机自动工作时,微控制器通过分析处理传感器反馈回来的信息,根据不同情况来控制电磁阀的开断,从而实现对气路的控制,进而控制刹车气缸或离合气缸的伸缩。
e.电机保护。对电机的保护主要是通过控制继电器的通断,其开关控制电路与刹车/离合控制电路相似。
f.人机交互。安装按键与液晶显示模块,通过按键输入参数来调整冲孔打桩机在运行过程中的一些信息参量,并通过液晶显示出来。设计中液晶选用JRM19264A。
g.其他保护电路。主要针对桩锤被卡住、桩锤提升过高、余绳过长等故障进行保护。
4控制算法研究
为了保证自动冲孔打桩机运行时的稳定性,需要深入研究最优的控制算法,主要研究专家控制系统、针对余绳的最优控制算法以及FFT算法等[11]。
4.1 专家系统
施工现场会遇到斜岩、沙石岩等地质环境,打桩机需要针对这些环境进行适应型调整。根据地质环境信息,不同地质环境下余绳的长度信息、冲程长度和泥浆相对密度等信息,构建专家知识库。冲孔打桩机在工作过程中,微控制器通过传感器反馈的信息得知当前地质环境的知识,依据专家知识库中的知识进行知识推理,然后根据余绳控制规则表对比或推断出相应的余绳长度、冲程长度等,最后通过知识表达规则集输出到执行机构上。根据《冲孔灌注桩施工工艺》的施工要求,对不同土层中的冲程、泥浆相对密度及余绳长度制定控制规则。
4.2 针对余绳的最优控制算法研究
当遇到斜岩、沙石岩等复杂地质环境时,需要控制桩锤能够在撞击岩石后瞬间迅速停下来并且能够迅速被提升至设定高度,接着进行下一次打桩动作,在此过程中需要对余绳长度进行精确控制,余绳最优控制算法的研究为达到这一要求起到关键性作用。冲孔打桩机在工作过程中的放绳和余绳的控制算法是一种随动的控制算法,需要根据不同的地质类型,随时调整余绳长度和工作状态,因此常采用模糊自适应控制算法对余绳长度进行控制。
4.3 FFT算法
对起锤信号的检测是打桩机整个系统正常工作的关键,在检测起锤信号的过程中,电流信号波动较大,输出波形毛刺明显,很大程度上影响了起锤信号的检测精度,也就影响了整个系统的稳定性和可靠性。为了能直观的表现出起锤信号的异变规律,需要对起锤信号进行频域分析。
(1)
用LM358分别用作信号跟随和有源滤波,经过Multisim仿真后得到的信号波形图如图4、图5所示。
图4 信号源形
图5 最终进入CPU的起锤信号波形
图5是经过整流、跟随、滤波等一系列信号处理之后最终进入CPU的波形图。以上这些图都是理论波形图,在实际硬件调试中,利用示波器对该起锤信号检测电路进行分析得到的实际波形图与上述理论波形图基本一致。
经过仿真分析与试验调试,设计的起锤信号检测电路理论效果与实际效果相差甚微,达到了预期目标。这部分的设计是系统设计的重点也是难点。

(2)
通过以上公式可以发现,将时域不断进行分解,按时间抽取算法可知在尽量小的序列上进行离散傅里叶变换,得到频域序列X(k)。
为了验证起锤信号经过FFT变换后的明显变化,通过Codewarrior编译软件在起锤瞬间抽取500个数据信号,然后利用Matlab软件对这些数据进行仿真实验分析[12],仿真波形图如图6所示。
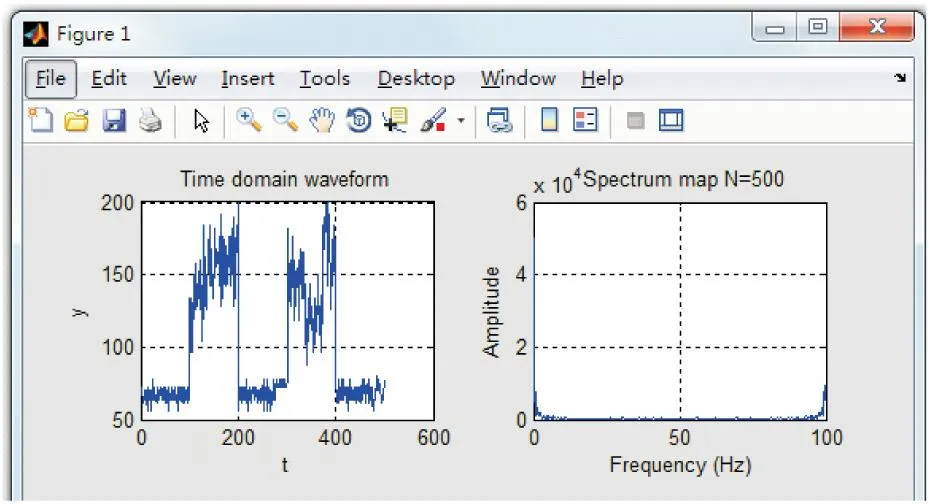
图6 FFT仿真结果
通过对仿真结果进行分析容易得出,时域信号经过FFT变换成频域信号后,消除了毛刺,有效地防止杂波信号的干扰。因此,对起锤信号进行频域分析,明显提高了冲孔打桩机的稳定性和可靠性。
5结束语
对手动式冲孔打桩机进行自动化改进后,通过采用FFT算法对起锤信号进行处理,将时域信号变换成频域信号,进行频域分析,保证了整个系统运行的稳定性与可靠性。采用模糊自适应控制算法来对余绳长度进行精确控制,使冲孔打桩机控制系统能够精准的控制桩锤的高度与力度[13]。采用专家控制系统,根据地质类别、余绳长度、冲程距离、泥浆比重等指标,构建专家知识库进行数学建模,使打桩机在遇到斜岩、粘岩、沙石岩等地质环境时能够推理出相应的控制策略,从而增加冲孔打桩机控制设备对复杂环境的适应能力。研究有效地提高了冲孔打桩机的工作效率,增强了打桩机对环境的适应性,降低了施工人员的劳动强度,在很大程度上节约了成本。所研究的自动冲孔打桩机已经应用在国家高速公路G75兰海高速公路的武罐高速施工段第14标段,并且还应用在G7011十天高速公路段安康、汉中、天水等地,得到了施工人员的一致好评。
参考文献:
白晓军,赖涤泉.桩基工程中冲孔打桩机的应用及展望.石家庄铁道学院学报(自然科学版),2009(6):36-52
韩轩,梁允,许斌成.打桩工快速入门.北京:北京理工大学出版社,2011.
张忠海.液压式振动桩锤发展现状及选型应用.建筑机械,2001(3):25-31.
徐锦康,刘极峰.机械优化设计.北京:机械工业出版社,2007.
邓长峰.多功能打桩机.中国专利:200610070513.5,2007-05-09.
ZimmermanJoshuaD,WilliamsonChristopherA,PelosiMatteo,etal.EnergyconsumptionofanLSexcavatorhydraulic.ASMEIntMechEngCongressExposProc,2008(4) : 117-126.
于海生.微型计算机控制技术.北京:清华大学出版社,1999.
吴卫荣.气动技术.北京:中国轻工业出版社,2011.
高大钊,赵春风,徐斌.桩基础的设计方法与施工技术.北京:机械工业出版社,2002.
[10]AnujBatra.ARMtriesmultiProcessorsforfasterconsumerdevicesCI.IEEE802.15.WorkingGroupDoeumentation,No.IEEEP802,2009.
[11]李廷.徐振华.锤击管桩沉桩过程模拟与算法.铁道科学与工程学报,2010(04):58-79.
[12]肖天金,迟永滨,李仕新.基于Matlab和VB的液压打桩锤系统仿真设计.设计制造. 2004(6):131-145.
[13]ZimmermanD,WilliamsonChristopherA,PelosiMatteo.EnergyconsumptionofanLSexcavatorhydraulic.ASMEIntMechEngCongressExposProc,2008(4):117-126.
猜你喜欢
数学物理学报(2021年5期)2021-11-19 07:01:16
石油沥青(2021年4期)2021-10-14 08:50:44
数学物理学报(2018年1期)2018-03-26 08:16:44
中小企业管理与科技·上旬刊(2017年1期)2017-01-06 14:29:58
商情(2016年42期)2016-12-23 16:53:09
中国科技博览(2016年23期)2016-12-09 10:13:59
厦门理工学院学报(2016年1期)2016-12-01 04:50:51
企业技术开发·下旬刊(2016年9期)2016-11-23 02:19:29
科技视界(2016年21期)2016-10-17 18:23:56
科技视界(2016年5期)2016-02-22 13:39:03
