BDS/GPS精密单点定位收敛时间与定位精度的比较
2016-01-07 03:48:40张小红潘宇明
测绘学报 2015年3期
关键词:定位精度
张小红,左 翔,李 盼,潘宇明
武汉大学测绘学院,湖北 武汉 430079
Convergence Time and Positioning Accuracy Comparison between BDS and GPS Precise Point Positioning
ZHANG Xiaohong, ZUO Xiang, LI Pan, PAN Yuming
School of Geodesy and Geomatics, Wuhan University, Wuhan 430079, China
Foundation support: The National Natural Science Foundation of China (No.41474025 ); The Fundamental Research Founds for the Central Universities(No. 2012214020207)
BDS/GPS精密单点定位收敛时间与定位精度的比较
张小红,左翔,李盼,潘宇明
武汉大学测绘学院,湖北 武汉 430079
Convergence Time and Positioning Accuracy Comparison between BDS and GPS Precise Point Positioning
ZHANG Xiaohong, ZUO Xiang, LI Pan, PAN Yuming
School of Geodesy and Geomatics, Wuhan University, Wuhan 430079, China
Foundation support: The National Natural Science Foundation of China (No.41474025 ); The Fundamental Research Founds for the Central Universities(No. 2012214020207)
摘要:采用武汉大学卫星导航定位技术研究中心发布的北斗精密卫星轨道和钟差,在TriP 2.0软件的基础上实现了BDS PPP定位算法,并利用大量实测数据进行了BDS/GPS 静态PPP和动态PPP浮点解试验。结果表明,BDS 静态PPP的收敛时间约为80min,动态PPP的收敛时间为100min;对于3h的观测数据,静态PPP收敛后定位精度优于5cm,动态PPP收敛后水平方向优于8cm,高程方向约12cm;与GPS PPP类似,东分量上定位精度较北分量稍差。当前由于BDS的全球跟踪站有限,精密轨道和钟差精度不如GPS,因此BDS PPP的收敛时间较GPS长,但收敛后可实现厘米至分米级的绝对定位。
关键词:北斗卫星导航;精密单点定位;定位精度;收敛时间
1引言
精密单点定位技术(precise point positioning, PPP)采用单台GNSS接收机,利用国际GNSS服务组织(International GNSS Service, IGS)提供的精密星历和卫星钟差,基于载波相位观测值可实现毫米至分米级高精度定位。经过十多年的快速发展,GPS PPP的基本理论和实践问题已经得到了比较好的解决,目前已在高精度测量、低轨卫星定轨、航空测量、地表形变监测等领域取得了广泛的应用[1-8]。
北斗卫星导航系统(BeiDou Navigation Satellite System, BDS)是中国正在实施的自主发展、独立运行的全球卫星导航系统。截至2012年12月28日,BDS已有5颗GEO、5颗IGSO和4颗MEO卫星在轨运行,初步形成了亚太地区的导航定位服务能力[9]。随着北斗系统的逐步完善和发展,基于BDS的PPP技术吸引了国内外学者的广泛关注。文献[10]采用“北斗卫星观测试验网”(BETS)实测数据和我国自主研制的精密数据处理软件PANDA,实现了北斗导航卫星系统静态PPP,研究成果显示BDS静态PPP定位精度达到厘米级。文献[11]也取得了水平和垂直方向12 cm的静态北斗PPP结果,并指出该精度较低的原因是由于目前跟踪网的测站数较少,估计的北斗轨道和钟差产品精度较低所致。文献[12]利用北京和武汉站一周的观测数据进行了BDS的静态和动态PPP试验,结果表明BDS静态单天解可达1~2cm、动态单天解可达4~6cm。此外,文献[13]也利用2个测站3天的观测数据,初步评估了GPS、BDS、GPS/BDS双频非组合PPP的定位性能[13]。
然而,目前针对BDS PPP的试验结果大多只给出了少量单天解的结果,研究还不够全面和深入。在工程实践中,为了提高作业效率,高精度用户在很多应用场合只会观测数小时甚至更短的时间,此时BDS PPP能达到什么精度,以及为满足厘米精度的PPP定位,北斗用户最少需要观测多少时间,这些都还不是很清楚。北斗区域导航定位系统已经可向亚太地区提供被动式定位服务,PPP技术作为一种有效便捷的高精度定位技术,研究分析当前BDS PPP的定位性能,特别是其收敛速度和定位精度,具有重要的现实意义和应用价值。鉴于上述原因,本文旨在研究BDS PPP的收敛速度和短时间(数小时)的定位精度。
2BDS精密单点定位模型与数据处理策略
2.1观测方程
与GPS PPP类似,BDS PPP的基本观测方程采用双频无电离层组合以消除电离层一阶项误差的影响。BDS具有B1、B2、B3共3个信号频率,本文采用B1、B2频率上的相位和伪距观测值进行无电离层组合,其具体观测方程如下[14]
(1)
(2)

2.2参数估计及误差处理策略
通过无电离层组合消除电离层延迟一阶项的影响后,PPP的待估参数包括测站坐标、接收机钟差、天顶对流层延迟,以及各卫星连续观测弧段内的模糊度参数。BDS PPP对于未知参数和各误差项的处理方式与GPS PPP类似。对于对流层延迟参数,首先使用Sasstamonion模型[15]改正其干分量,残余的湿分量则采用随机游走进行估计,并使用GMF投影函数[16]将天顶对流层延迟投影到传播路径上。使用精密的卫星轨道和卫星钟差产品来固定卫星轨道和钟差,对观测值中影响在厘米级以上的系统误差,包括相对论效应、固体潮汐、相位缠绕使用模型进行改正。值得注意的是,目前IGS只提供了粗略的BDS卫星端PCO改正,尚无机构或组织提供BDS卫星端PCV以及接收机端的PCO与PCV信息,因此无法进行精确的天线相位中心偏差及其变化改正。
本文在数据预处理阶段首先进行钟跳探测与修复,避免将接收机钟跳引起的观测值跳变误判为周跳,然后联合使用GF与MW组合探测周跳[17]。使用扩展卡尔曼滤波(EKF)进行参数估计,并通过对验后残差进行分析,采用改进的IGGIII抗差估计方案[18]进行质量控制。具体的参数估计策略如表1所示。

表1 估计参数及其估计策略
3BDS/GPSPPP试验及结果分析
为了评价BDSPPP的定位性能,本文选取了8个测站2013年DOY264—270共7d的BDS/GPS双系统GNSS观测数据,分别进行静态和动态PPP试验。试验数据来源于IGS的MGEX(muti-GNSSexperiment)观测网,所选测站信息如表2所示,CUAA、CUBB以及CUT1-CUT3均分布在Curtin大学里面,GMSD和NNOR分别位于日本和澳大利亚,REUN站位于南非附近。作为对比,对各测站同时进行GPSPPP解算,并以其静态单天解作为各测站坐标参考真值。观测数据采样率为30s,精密产品采用武汉大学卫星导航定位技术研究中心提供的BDS30s精密星历和30s钟差产品,以及ESA分析中心提供的GPS15min精密星历和30s钟差产品。使用IGS提供的ANTEX文件改正GPS卫星端和接收机端PCO和PCV,BDS仅进行卫星端PCO改正。
试验将每个测站24h观测数据切割为8个子时段,按每子时段为3h,一共有448个子时段。将各子时段PPP解算结果与参考真值做差,获得E、N、U3个方向上的坐标偏差以分析BDSPPP的收敛时间和定位精度。本文中的滤波收敛定义为ENU各向定位偏差均优于1dm。为确保结果的可靠性,同时检查了首次收敛时刻后续20个历元的位置偏差,只有当连续20个历元的偏差都在限值以内时,才认为滤波在当前历元收敛[19-20]。
3.1收敛速度分析
对448个3h观测时段分别进行静态、动态前向卡尔曼滤波,并统计每个数据的收敛时间,其中剔除了部分异常数据(观测质量太差或卫星数较少,约占10%)。首先以DOY264CUT2站第1时段的定位结果为例,比较分析了BDS/GPSPPP的定位偏差序列,如图1、图2所示。从图1、图2可以看出,BDS静态PPP经过30min滤波可以达到收敛,动态PPP的收敛时间较长,需要约80min才逐渐收敛。而GPSPPP的收敛时间相对较短,静态约20min、动态30min。图3为该时段BDS、GPSPPP的PDOP值和可视卫星数。可以看出,尽管大部分时间BDS卫星数多于GPS,但由于目前BDS的MEO卫星数较少,总体上BDS的PDOP反而不如GPS;此外,BDS几何图形结构变化不如GPS星座显著;再者,当前由于BDS的跟踪站数量有限,BDS的精密轨道精度较低,从而导致BDSPPP的收敛时间长于GPS。滤波收敛之后,两者的静态PPP结果相差很小且比较稳定。而BDS动态PPP由于还未充分收敛,精度及稳定性均比GPSPPP结果要差一些。
对各天数据的静态和动态PPP收敛时间进行统计,得到各天的平均收敛时间,结果如图4所示。从中可以看出,对基于BDS和GPS系统的PPP定位,各天之间的平均收敛时间具有较好的一致性,天与天之间并无显著差异。图5、图6分别给出了7天所有数据静态、动态PPP的收敛时间分布统计。从图中可以看出,BDS静态PPP的收敛时间均匀分布在20~70min、70~110min和110~180min3个区间,各占约50%、20%、30%。动态PPP与静态PPP类似,收敛时间分布跨度较大,且约有10%的数据超过了180min。GPS静态PPP收敛时间主要集中在10~30min,动态PPP收敛时间主要集中在10~60min,各约占80%、77%。所有数据的收敛时间统计如下:BDS静态PPP的平均收敛时间为77.4min,动态PPP为98.3min;GPS静态、动态PPP的平均收敛时间分别为27.6min和49.6min。不管是静态PPP还是动态PPP,BDS的收敛时间均比GPS长约50min左右。
众所周知,PPP的解受卫星轨道和钟差产品精度、星座几何强度的影响较为明显。目前BDS的精密卫星产品的精度较GPS差,且无法精确改正PCO和PCV误差。而且,目前BDS的可用卫星数只有14颗,而GPS有31颗,其几何强度远比BDS要好。因此,当前条件下BDSPPP的收敛时间明显长于GPSPPP。
3.2BDS/GPS定位精度分析
为分析滤波收敛后BDSPPP的定位精度及稳定性,对每天的解算结果进行统计。静态结果计算其定位偏差均方根RMS,对于动态结果计算平均RMS值,统计时剔除了收敛时间超过160min的数据。以DOY264天为例,图7、图8分别给出了各测站静态、动态PPP定位结果统计。可以看出,对于静态解算模式,BDSPPP滤波收敛后E分量大部分优于5cm,N分量大部分优于3cm,U分量优于6cm。GPSPPP各分量RMS约为(1.5,1,2)cm。 对于动态解算模式,BDSPPPE方向大部分优于10cm,N方向优于8cm,U方向约16cm左右。GPSPPP各方向RMS约为(3,1.5,4)cm。

图3 DOY264 CUT2站第1时段BDS、GPS PDOP和卫星数Fig.3 PDOP and satellite number at station CUT2-1 in DOY 264

图4 DOY264—270各天静态、动态PPP平均收敛时间Fig.4 Average convergence time of static、kinematic PPP per day

图5 BDS、GPS静态PPP收敛时间分布Fig.5 Distribution of convergence time of BDS、GPS static PPP
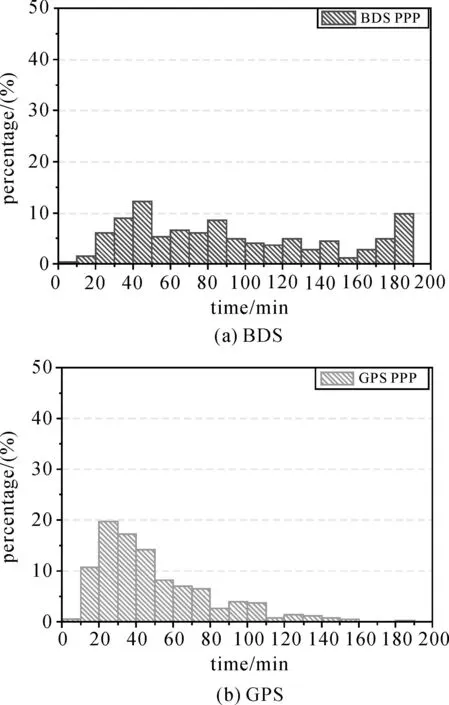
图6 BDS、GPS动态PPP收敛时间分布Fig.6 Distribution of convergence time of BDS、GPS kinematic PPP

图7 DOY264各站BDS、GPS静态PPP定位偏差RMSFig.7 RMS of position bias of BDS、GPS static PPP per station in DOY 264
表3BDSPPP和GPSPPP各时段解的东北高分量上的平均RMS
Tab.3AverageRMSofeachBDS/GPSPPPsolutionineast/north/upcomponent

cm
除了3h的观测时段之外,笔者还分析处理了其他不同时段长度(6h,8h,12h,24h)BDS/GPSPPP的定位偏差。对所有分时段数据计算平均RMS偏差,如表3所示。可以看出,对于3h的观测数据,BDS静态PPP定位精度优于5cm;动态PPP水平方向定位精度优于8cm,高程方向约12cm。GPS静态PPP定位精度优于2cm,动态PPP水平方向优于3cm,高程方向约4cm。随着观测时间的增加,BDS静态、动态PPP的定位精度都有不同程度的提高,静态单天解水平方向优于1cm,高程方向约为2cm;动态单天解可达水平方向3~4cm,高程方向6cm左右的精度。整体上而言,BDSPPP收敛后的定位精度要略低于GPS。这主要是由于当前BDS的MEO卫星数较少,卫星分布及定位的几何图形结构比GPS差一些,且轨道和钟差产品精度相对较低,导致其PPP定位精度要略低于GPS,动态精度的差别更为明显,这是因为静态结果统计是对各时段收敛后最后一个历元的定位偏差计算RMS,而动态结果统计是从各时段的收敛时刻开始对偏差序列计算RMS。由于BDS动态PPP收敛时间较长(约100min),尽管在收敛时刻各方向的定位偏差已经优于1dm,但相对于GPS结果来说大部分还未达到充分收敛。从而导致表3中较短观测时段(如3h、6h)的BDS动态PPP统计结果与GPS相差较大。此外,从表中可明显看出,两种PPP北分量定位精度均优于东分量,这是由于PPP保留浮点解,未将模糊度参数固定为整数的缘故[21]。
4结论
本文利用武汉大学卫星导航定位技术研究中心发布的北斗精密卫星轨道和钟差,在TriP2.0平台上实现了BDSPPP算法模块。并以GPSPPP为参考,基于大量实测数据进行了BDS静态PPP、动态PPP试验。结果表明,BDS静态PPP的收敛时间约为80min,动态PPP的收敛时间约为100min。对于3h的观测数据,静态PPP收敛后定位精度优于5cm,动态PPP收敛后水平方向优于8cm,高程方向约12cm。与GPSPPP类似,东分量上定位精度较北分量稍差。说明当前BDSPPP的收敛时间较长,收敛后80~100min内可实现厘米至分米级绝对定位。将来随着北斗精密产品精度的提高及PCO、PCV模型的精化,其收敛时间和定位精度将得到进一步提高和改善。
致谢:感谢CurtinUniversity和IGSMGEX提供的BDS/GPS观测数据;感谢武汉大学卫星导航定位技术研究中心提供的BDS精密星历和钟差产品;感谢ESA分析中心提供的GPS精密星历和钟差产品。
参考文献:
[1]ZUMBERGEJF,HEFLINMB,JEFFERSONDC,etal.PrecisePointPositioningfortheEffcientandRobustAnalysisofGPSDatafromLargeNetworks[J].JournalofGeophysicalResearch, 1997, 102(B3): 5005-5017.
[2]KOUBAJ,HÉROUXP.GPSPrecisePointPositioningUsingIGSOrbitProducts[J].GPSSolutions,2001, 5(2): 12-28.
[3]ZHANGXiaohong,LIPan,ZUOXiang.KinematicPreciseOrbitDeterminationBasedonAmbiguity-fixedPPP[J].GeomaticsandInformationScienceofWuhanUniversity, 2013,38(9): 1009-1013. (张小红,李盼,左翔. 固定模糊度的精密单点定位几何定轨方法及结果分析[J]. 武汉大学学报 :信息科学版, 2013,38(9): 1009-1013.)
[4]ZHANGXiaohong,HEXiyang,LIXingxing.AnalysisofUndifferencedKinematicPODforLEOsUsingTrip[J].GeomaticsandInformationScienceofWuhanUniversity, 2010,35(11): 1327-1330. (张小红,何锡扬,李星星.Trip软件非差几何法精密定轨精度分析[J]. 武汉大学学报:信息科学版, 2010,35(11): 1327-1330.)
[5]ZHANGXiaohong,ANDERSENO.SurfaceIceFlowVelocityandTideRetrievaloftheAmeryIceShelfUsingPrecisePointPositioning[J].JournalofGeodesy,2006, 80(4): 171-176.
[6]ZHANGXiaohong,LIUJingnan,FORSBERGRene.ApplicationofPrecisePointPositioninginAirborneSurvey[J].GeomaticsandInformationScienceofWuhanUniversity, 2006,31(1): 19-22. (张小红,刘经南,ForsbergRene. 基于精密单点定位技术的航空测量应用实践[J]. 武汉大学学报:信息科学版, 2006,31(1): 19-22.)
[7]ZHANGBaocheng,OUJikun,YUANYunbin,etal.CalibrationofSlantTotalElectronContentandSatellite-receiver’sDifferentialCodeBiaseswithUncombinedPrecisePointPositioningTechnique[J].ActaGeodaeticaetCartographicaSinica, 2011, 40(4): 447-453. (张宝成,欧吉坤,袁运斌,等. 利用非组合精密单点定位技术确定斜向电离层总电子含量和站星差分码偏差[J]. 测绘学报, 2011, 40(4): 447-453.)
[8]YUANXiuxiao,FUJianhong,LOUYidong.GPS-supprotedAerotriangulationBasedonGPSPrecisePointPositioning[J].ActaGeodaeticaetCartographicaSinica, 2007,36(3): 251-255. (袁修孝,付建红,楼益栋. 基于精密单点定位技术的GPS辅助空中三角测量[J]. 测绘学报,2007,36(3): 251-255.)
[9]YANGYuanxi.Progress,ContributionandChallengeofCompass/BeiDouSatelliteNavigationSystem[J].ActaGeodaeticaetCartographicaSinica, 2010,39(1): 1-6. (杨元喜. 北斗卫星导航系统的进展、贡献与挑战[J]. 测绘学报,2010,39(1): 1-6.)
[10]SHIChuang,ZHAOQile,LIMin,etal.PreciseOrbitDeterminationofBeidouSatelliteswithPrecisePositioning[J].ScienceChinaEarthScience, 2012,55(7):1079-1086. (施闯,赵齐乐,李敏,等. 北斗卫星导航系统的精密定轨与定位研究[J]. 中国科学: 地球科学,2012, 42(6): 854-861.)
[11]MONTENBRUCKO,HAUSCHILDA,STEIGENBERGERP,etal.InitialAssessmentoftheCOMPASS/BeiDou-2RegionalNavigationSatelliteSystem[J].GPSSolutions,2013(17): 2111-2122.
[12]MARui,SHIChuang.PrecisePointPostioningResearchBasedonBeiDouNavigationSatelliteSystem[J].JournalofNavigationandPositioning, 2013,1(2): 7-10. (马瑞,施闯. 基于北斗卫星导航系统的精密单点定位研究[J]. 导航定位学报, 2013,1(2): 7-10.)
[13]LIW,TEUNISSENP,ZHANGBaocheng,etal.PrecisePointPositioningUsingGPSandCompassObservations[C]∥ProceedingsofChinaSatelliteNavigationConference(CSNC) 2013.[S.l.]:Springer, 2013.
[14]QULizhong,ZHAOQile,LIM,etal.PrecisePointPositioningUsingCombinedBeidouandGPSObservations[C]∥ProceedingsofChinaSatelliteNavigationConference(CSNC) 2013.[S.l.]:Springer, 2013.
[15]SAASTAMOINENJH.AtmosphericCorrectionfortheTroposphereandStratosphereinRadioRangingofSatellites[C]∥TheUseofArtificialSatellitesforGeodesy.WashingtonDC:[s.n.], 1972.
[16]BOEHMJ,NIELLA,TREGONINGP,etal.GlobalMappingFunction(GMF):ANewEmpiricalMappingFunctionBasedonNumericalWeatherModelData[J].GeophysicalResearchLetters,2006, 33(7): 304-307.
[17]ZHANGXiaohong,GUOFei,LIPan,etal.Real-timeQualityControlProcedureforGNSSPrecisePointPositioing[J].GeomaticsandInformationScienceofWuhanUniversity, 2012,37(8): 940-944. (张小红,郭斐,李盼,等.GNSS精密单点定位中的实时质量控制[J]. 武汉大学学报:信息科学版, 2012,37(8): 940-944.)
[18]ZHOUJiangwen.ClassicalTheoryofErrorsandRobustEstimation[J].ActaGeodaeticaetCartographicaSinica, 1989,18(2): 115-120. (周江文. 经典误差理论与抗差估计[J]. 测绘学报, 1989,18(2): 115-120.)
[19]ZHANGXiaohong,LIPan,GUOFei.AmbiguityResolutioninPrecisePointPositioningwithHourlyDataforGlobalSingleReceiver[J].AdvancesinSpaceResearch,2013,51(1):153-161.
[20]LIPan,ZHANGXiaohong.IntegratingGPSandGLONASStoAccelerateConvergenceandInitializationTimesofPrecisePointPositioning[J].GPSSolutions,2014,18(3): 461-471.
[21]BLEWITTG.CarrierPhaseAmbiguityResolutionfortheGlobalPositioningSystemAppliedtoGeodeticBaselinesupto2000km[J].JournalofGeophysicalResearch,1989, 94(B8): 187-203.
(责任编辑:宋启凡)
修回日期: 2014-04-01
Firstauthor:ZHANGXiaohong(1975—),male,professor,PhDsupervisor,majorsinGNSSprecisepointpositioninganditsapplicationingeoscience.
E-mail:xhzhang@sgg.whu.edu.cn
Vol.44,No.3
ActaGeodaeticaetCartographicaSinica
March,2015
中图分类号:P228
文献标识码:A
文章编号:1001-1595(2015)03-0250-07
基金项目:国家自然科学基金(41474025);中央高校基本科研业务费专项资金(2012214020207)
收稿日期:2013-12-17
第一作者简介:张小红(1975—),男,教授,博士生导师,研究方向为精密单点定位(PPP)和GNSS地学应用。
Abstract:BDS/GPS data from MGEX were processed by TriP 2.0 software developed at Wuhan University. Both static and kinematic float PPP are tested by adopting precise satellite orbits and clocks provided by Research Center of GNSS, Wuhan University. The results show that the convergence time of BDS static PPP is about 80min while kinematic PPP is about 100min. For 3h observations, static positioning accuracy of 5cm and kinematic positioning accuracy of 8cm in horizontal, about 12cm in vertical can be achieved. Similar to GPS PPP, precision in east component is worse than north. At present, BDS PPP needs longer convergence time than GPS PPP to reach an absolute positioning accuracy of cm~dm due to the lack of global tracking stations and the limited accuracy of orbit and clock products.
Key words:BDS; precise point positioning; positioning accuracy; convergence time
引文格式:ZHANG Xiaohong, ZUO Xiang, LI Pan,et al.Convergence Time and Positioning Accuracy Comparison between BDS and GPS Precise Point Positioning[J]. Acta Geodaetica et Cartographica Sinica,2015,44(3):250-256.(张小红,左翔,李盼,等.BDS/GPS精密单点定位收敛时间与定位精度的比较[J].测绘学报,2015,44(3):250-256.) DOI:10.11947/j.AGCS.2015.20130771
猜你喜欢
军事文摘(2023年4期)2023-04-05 13:57:35
制造技术与机床(2019年12期)2020-01-06 03:18:26
智富时代(2019年4期)2019-06-01 07:35:00
测控技术(2018年4期)2018-11-25 09:47:22
制造技术与机床(2018年10期)2018-10-13 06:36:52
雷达学报(2017年1期)2017-05-17 04:48:48
测绘科学与工程(2016年6期)2016-04-17 06:51:21
测绘科学与工程(2016年4期)2016-04-17 06:51:09
航天返回与遥感(2014年5期)2014-07-31 17:57:09
自然资源遥感(2014年3期)2014-02-27 11:56:44