基于MS05AX测量机器人的精密三角高程误差来源与精度分析
2016-01-04 08:08白少云,杨琦
测绘通报 2015年2期
关键词:精度分析
引文格式: 白少云,杨琦. 基于MS05AX测量机器人的精密三角高程误差来源与精度分析[J].测绘通报,2015(2):58-63.DOI:10.13474/j.cnki.11-2246.2015.0042
基于MS05AX测量机器人的精密三角高程误差来源与精度分析
白少云1,杨琦2
(1. 云南省水利水电勘测设计研究院,云南 昆明 650021; 2. 北京拓普康商贸有限公司,北京 101102)
Analysis of Errors and Precision for Precise Triangulated Height Based on
MS05AX Measuring Robots
BAI Shaoyun,YANG Qi
摘要:对影响三角高程精度的主要因素进行了深入分析,详细分析了三角高程测量中天顶距误差来源及其对高差改正的影响,剖析了自动目标识别的主要误差源,阐述了折光系数误差是影响三角高程精度主要因素之一,提出了采用平差后高差进行大气折光系数修正的思路,利用动态折光系数对三角高程进行高差改正,为三角高程代替二等水准提供了一种新的思路。最后以实据工程为例,验证了精密三角高程代替二等水准的可行性。
关键词:二等水准;三角高程;动态折光系数;天顶距误差;精度分析
中图分类号:P224.2文献标识码:B
收稿日期:2014-06-02
作者简介:白少云 (1971—),男,高级工程师,从事水利水电勘测工作、大型精密工程测量方法的研究及应用。
E-mail:baishaoyun_cn@sina.com
一、引言
水利水电工程高程精度要求极高,大多数水电工程地处边远山区,地形切割激烈。受地形条件和放样方便等条件制约,大多数控制点埋设在较高的陡坡上,高差变化激烈,常规几何水准作业方式十分困难和危险。有的点相互之间直线距离不到1km,但由于山高坡陡,3~5天也不一定能完成二等几何水准的联测。水利水电项目联测几何水准不仅成本高、耗时长,而且观测条件也难以满足相应等级水准测量的精度要求。
随着高精度测量机器人的出现,全站仪精密三角高程代替二等水准测量在水电工程中逐步得到应用,特别是在高山、峡谷、跨河等水电工程中用几何水准测量法传递高程非常困难的情况下,采用高精度测量机器人进行三角高程测量却非常灵活、高效。文献[1—2]主要从测量方法上研究精密三角高程测量在一定条件和范围内可以代替一、二等水准测量,认为在三角高程测量中采用等距法或中间观测法进行测量可以消除或减弱地球曲率和大气折光的影响。但事实上由于温度、气压及下覆地物的不同,同一边长对向观测或不同方向同时观测的大气折光系数不相等,等距法或中间观测法可最大限度消除或减弱垂线偏差、地球曲率、仪器量测误差对高差改正的影响,但难以消除或抵消大气折光对高差改正的影响,甚至会导致对向高差互差增大的情况。
国内外曾有不少学者对大气折光改正的数学模型进行过研究,但由于大气折光随温度、气压、下覆地物、时间、空间等外界因素瞬息变化,各测站各方向的折光系数差异较大,在实际测量中,各方向折光系数大小不相等,符号也可能不同,往、返测有可能导致高差共同测小或测大,往返测均值不仅未能消除大气折光影响,而且有可能会包含比单向观测时更大的折光差[3]。
三角高程测量精度的主要误差来源为边长误差、天顶距测量误差、仪器高和觇标高量测误差、大气折光系数取值误差等。本文针对大气折光系数不确定性的特点,利用MS05AX测量机器人获得试验观测数据,从数值上分析大气折光系数对天顶距测量精度、高差改正的影响,结合三角高程平差后的高差,提出了采用平差后高差反演求解动态大气折光的思路,对高差进行二次改正,可有效减弱大气折光对三角高程精度的影响,并结合工程实例,验证了该方法能够满足二等水准测量精度的精度要求。
二、天顶距测量误差分析及对高差改正的影响
自动测量型全站仪又称测量机器人,是一种能代替人进行自动搜索、识别、跟踪和精确照准目标,获取目标相对测站的角度、距离等信息的智能型电子全站仪[4]。引起测量机器人天顶距测量误差的因素有很多,主要包括外界观测条件对自动目标识别 (automatic target recognition)的影响、大气折射导致的天顶距误差等。
1. 不同观测条件下自动目标识别天顶距测量精度分析
影响测量机器人自动目标识别天顶距测量精度的主要因素包括仪器置平误差、读数误差及外界观测条件等导致的系统识别误差,试验中采用强制归心盘,并采用自动记录模式,基本消除了前两项误差,外界条件是影响自动目标识别测角精度的主要因素。
在阴天、清晨、逆光、中午、日落前、夜间等6种观测条件进行不同方向的天顶距观测,分别采用人工和自动目标识别模式,对各点按18测回进行天顶距观测,并计算最终天顶距观测的平均值、中误差和最大较差,测试结果见表1。
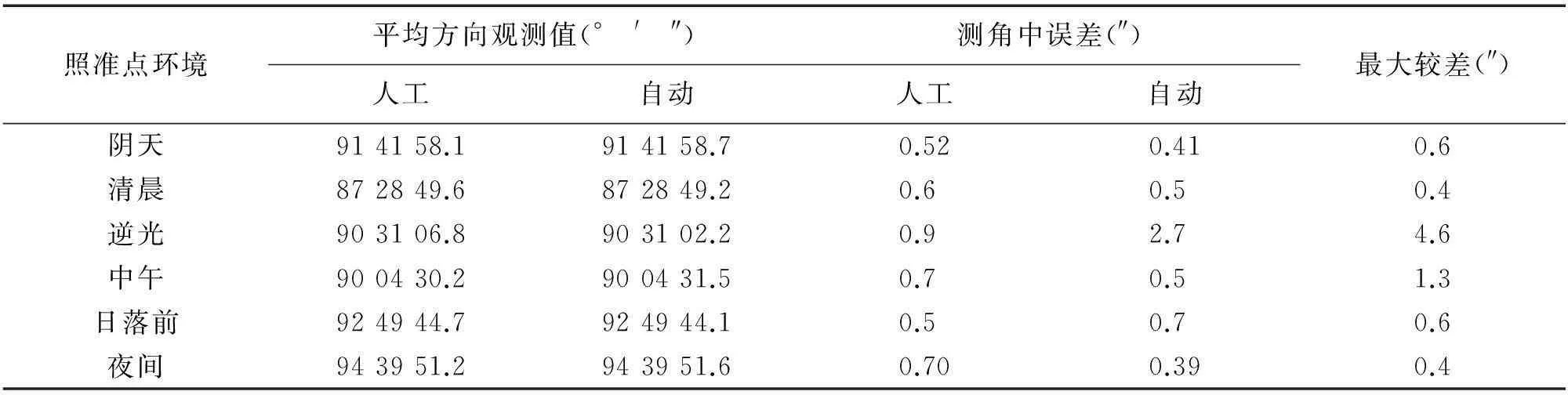
表1 不同观测条件下的自动目标识别与人工测值分析表
从表1分析可知,逆光条件下自动目标识别天顶距测量误差最大,逆光观测条件影响图像分割算法的稳定性,自动目标识别与人工观测最大天顶距较差达到4.6″,中误差也明显低于其他观测条件,其他条件下自动目标识别精度与人工观测精度相当,天顶距测量误差较小。由表1结果可以看出,夜间和阴天观测精度较高,其他观测条件天顶距中误差基本一致,但正午时天顶距差值较大。在实际工作中发现,在上午9:00—10:30,逆光方向甚至为出现指标差超限或无法识别目标的错误提示,只能采用人工观测模式进行测量,这也验证了逆光对自动目标识别的影响。
2. 特殊条件下的自动目标识别精度分析
对自动目标识别观测而言,如照准点背景为亮白色、强反射物质或玻璃背景时,自动目标识别的精度会受到很大影响,尤其是类玻璃反射背景对自动目标识别稳定性的影响最大。在实际观测中发现,部分点布设在覆有白色地膜的坡地上,阳光照射下棱镜背景为强反射薄膜面,导致自动目标识别观测误差超限,少数点甚至根本不能找到目标。相关资料[4]研究表明: “背景为强反射背景影响自动目标识别的测角精度,导致水平方向1″~ 2″、竖直方向3″~5″的偏差,自动目标识别的观测精度明显低于人工,其中玻璃背景对自动目标识别的测角精度影响最大,水平角和垂直角的精度分别降至6.0″和4.2″。当棱镜后有强反射背景时,自动目标识别的稳定性识别能力降低,导致测角误差增大”。因此在一、二等精密三角高程测量时,应优化观测方案,选择适合的时段进行测量,尽可能避免逆光或背景为强反射物质作业;观测条件不好的点位,可选择夜间或阴天进行观测,以保证天顶距测量精度。
3. 大气折射影响天顶距测量精度分析
由气象学常识可知,温度随高度增加而降低,海拔每升高1000m,温度相应降低6℃。由于地貌、地形和植被等下覆地物的不同,白天日照条件下,地表大量吸热,造成地表附近下层空气温度升高,上层空气由于未与地面直接接触就显得比较凉,造成上下温差变大,导致空气密度随高度增加而逐步减小,加之气压随高度而递减,地表气压高但空气密度大,随着高度增加,空气密度将逐步减小,导致空气密度在上述条件下随高度增加而减小,通常认为在这种条件下出现的大气折射为正常折射。
电磁波光线穿过不同密度空气层将导致折射曲线,因此,在观测负高差较大的目标时(如图1所示,从B点观测A点),光线从密度小的空气层进入密度大的空气层而产生折射,视线成为凹面向下的曲线,使目标天顶距观测值比实际值增大,导致负高差比实际高差增大[5]。反之,当观测正高差时(如图2所示,从A点观测B点),电磁波从密度大的空气层逐步进入密度小的空气层而产生向上凸起的折射,高度越低弯曲也越大,随着高度增加逐步趋于平缓,导致天顶距观测值比实际偏小,所测高差值也比实际高差值偏大。但由于对向观测大气折光不同,电磁波所经路径也不重合,导致负高差观测时天顶距与实际值偏离大于正高差观测的偏离值,因此通常情况下出现对向观测的负高差值大于正高差值。
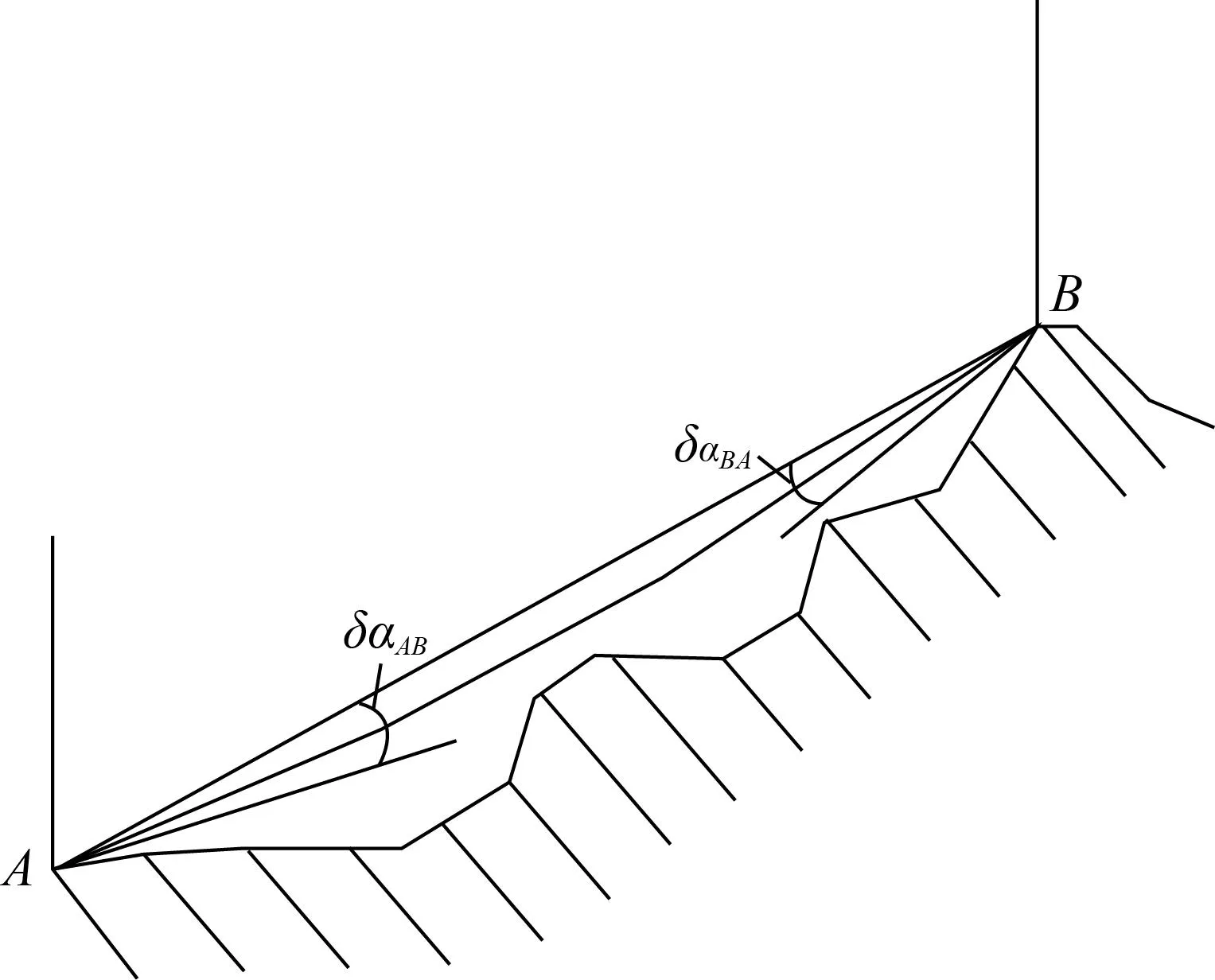
图1 负高差观测折光图
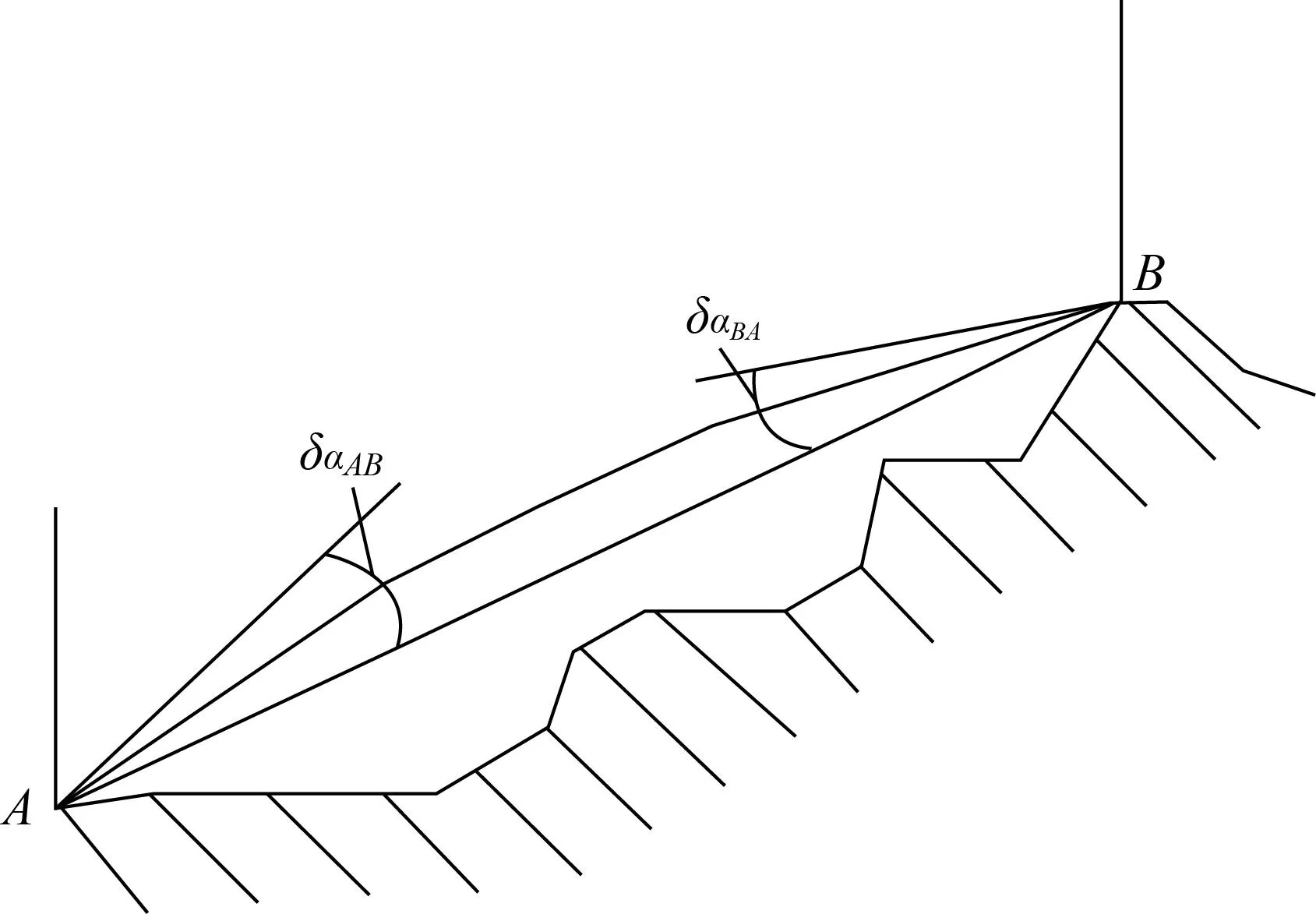
图2 正高差观测折光图
在近地面大气层,大气垂直折光系数K随地区、气候、季节、地面覆盖物及视线超出地面高度等条件不同而变化,并非一个常系数。正常情况下大气折射形状主要表现为整条光线向上或向下弯曲,在异常情况下,由于受外界因素的影响,大气折射表现形式非常复杂,对天顶距偏差的影响难于用准确模型表示,对三角高差精度有一定影响。相关研究[6]表明,高空折射率低而低空折射率高,即折射率是高度的函数,一般地理条件下,大气温度越接近地表,温度梯度越大,越向上越小。在进行负高差观测时,电磁波从高海拔低密度大气层进入低海拔高密度大气层,电磁波弯曲程度较大,反之弯曲程度较小,影像天顶距测量精度。
三、大气折光系数影响三角高程测量的误差分析
采用大气物理方法精确测定各观测边折光系数在现实中很难实现,故多数测绘生产部门通常用“测区平均折光系数K=0.14”对单向三角高程测量结果按式(1)施加折光改正。
(1)
式中,hAB为两点间高差;D为A、B之间的平距;α为视线AB的竖直角;i为仪器高;v为镜站高;R为地球曲率半径(R=6371km);K为大气折光系数。
对于对向EDM测高,则认为往、返测K值相等,取平均值就能抵消其影响[3]。事实上只有下覆地形及土壤、植被等条件相对于测线中点大致对称,且同时进行对向观测才能基本抵消折光影响,但事实上非对称地形同时对向观测和对称地形的非同时对向观测,取平均值都不能使折光误差得以抵偿,有时甚至还会出现均值中的折光误差大于其中某一单向相应值的情况。因此用测区平均折光系数进行折光改正,显然有悖于“K为变量”这一基本前提。
1. 工程实例
同一点不同方向的折光系数有很大的差异性,在牛栏江-滇池补水工程施工控制网测量中充分证明了这一点。以Ⅱ10点为测站对8个点Ⅲ68、Ⅲ67、Ⅲ54、Ⅲ70、Ⅲ52、Ⅲ51、Ⅲ49、Ⅲ65进行三角高程观测,在Ⅱ10点用TCA2003 按9测回测定以上8个点,并按同精度进行了相应对向观测(如图3所示)。
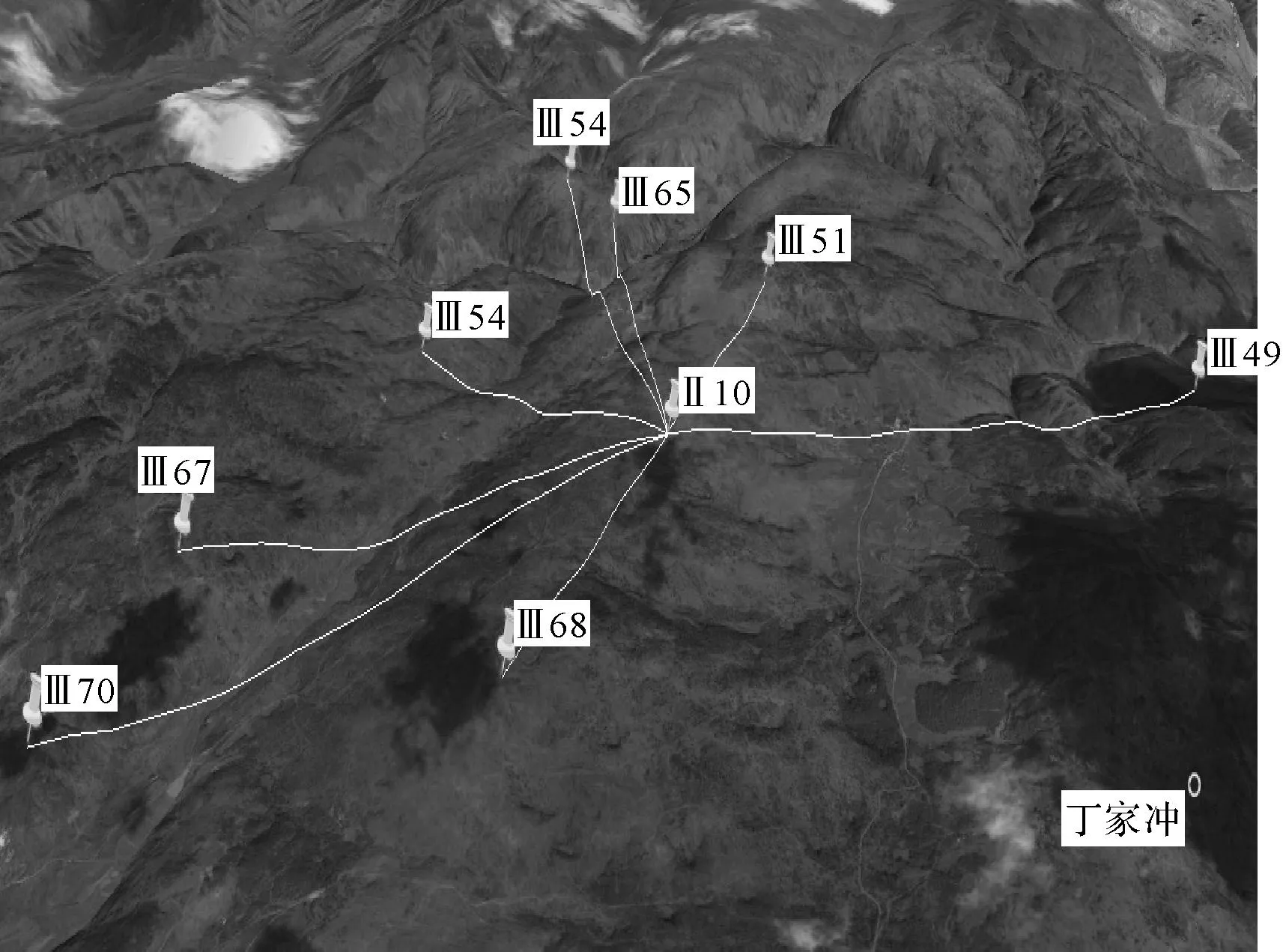
图3 EDM 测高试验点分布图
根据观测量对斜距进行严密改平后按式(1)进行高差改正,大气折光系数K取0.14。由表2计算可以看出,三角高程测量中由于视线经过的地形、地物不同,虽然在同一点上观测,且计算所采用的大气折光系数相同,但不同方向对向高差互差较大,最大互差达-167mm,最小高差较差为-42mm。
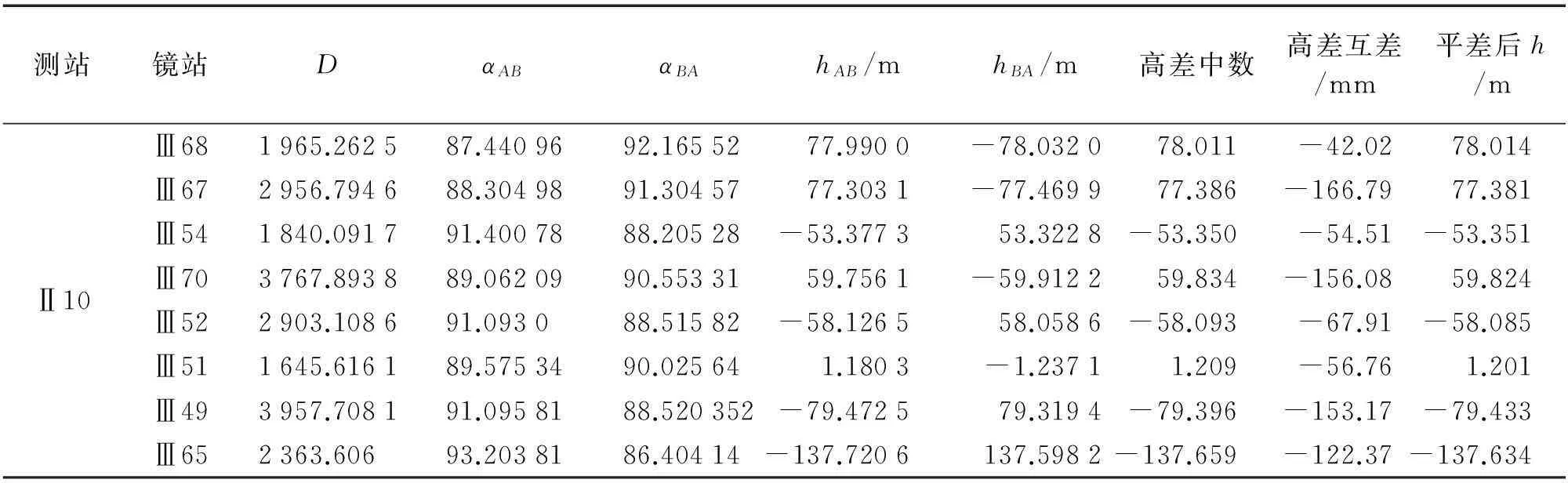
表2 高差改正计算
2. 天顶距误差影响高差改正分析
从上面试验结果可以看出,高差较差不满足二等水准测量相关规范限差要求,为找到互差过大的原因,对式(1)进行微分,并根据误差传播定理得出[6]
(2)
由式(2)分析可知,影响三角高程测量精度的主要误差为垂直角测角误差、大气折光系数误差、仪器高误差、棱镜高误差4个方面的因素。该试验采用了强制归心盘,并用经过检定的条形钢尺在两方向量取仪器高和目标高,精度可达0.3mm,因此i和v的影响可忽略不计。观测中使用MS05AX 进行了18测回天顶距观测后取平均值,且仪器测角精度为0.5″,测角精度ma不大于0.5″,垂直角对高差的影响随着距离的增加而增大。由以上分析知,垂直角误差是三角高程测量的主要误差来源,K值误差影响次之[6],而D的误差影响很小,取大气折光系数K=0.14按式(1)进行高差改正计算,可得出天顶距误差对高程影响(见表3)。

表3 天顶距误差对高差改正误差影响计算表
从表3 分析可以看出,如只考虑天顶距误差对高差改正影响的情况下,当距离为500m左右、天顶距误差为1″时,对高差改正产生2.3mm的影响,且高差改正误差与天顶距误差成正比,天顶距误差越大,高差改正的误差也越大;当边长增加时,天顶距误差对高差改正误差的影响也增大,边长每增加500m,1″天顶距误差导致高差改正增加2.5mm左右的误差,影响值与垂直角大小有关。
3. 基于平差后高差反演K值修正
在垂直角误差不变的情况下,如果所采用的K值与实际差异较大,将可能导致对向观测高差的较差超限。关于折光系数的精度,过去有试验[6]说明,折光系数的中误差为0.03~0.04 ,现有文章认为最大的可达0.16 ,这一误差将导致三角高程测量高差较差增大。在相对对称地形条件下,往测、返测时大气折光系数变化较小,对往、返测高差影响相当。由表2计算可知,在EDM测量中,采用K=0.14进行高差改正是不适宜的。
大气折光主要取决于电磁波所经路径上大气密度分布和温度、气压、湿度等因素,并与路径下覆地物及地形对称性有密切的相关性。以往采用取往返测高差均值的做法,只有在往、返测K值相近的情况下才能消除大气折光的影响。但在实际工作中,同一测段的对象观测的K值并不相等,通常采用K=0.14往往与实际K值相差较大,导致对向较差出现较大差值。从物理学上讲,大气折光系数应等于电磁波所经路径上所有点折光系数的加权平均值(如式(3)中,a为理想气体膨胀系数,P为气压,t为温度),但在实际应用中几乎不可能测定各点的折光系数,在实际工程中为求解各方向K值而精密测定所有点的高差也没有实际意义。
(3)
在不考虑天顶距测量误差的理想条件下,经过两差改正后的三角高差在理论上应该与精密水准高差相等。假设已知测线两点精密水准高差,通过观测高度角a和平距D,精确量取仪器高和目标高,由式(1) 变换得式(4),可按式(4)计算该方向的K值
(4)
为获得测线两端点的严密高差,可先取K=0.14按式(1)进行全网高差改正,并检查改正后的三角形闭合差、高差互差。在限差条件满足规范要求条件下,进行高程网平差,平差时可适当增加一些已知水准高程点作为起算点进行三角高程网约束平差,求出相应点间严密高差,并按式(4)进行各个方向的K值计算,结果见表4。
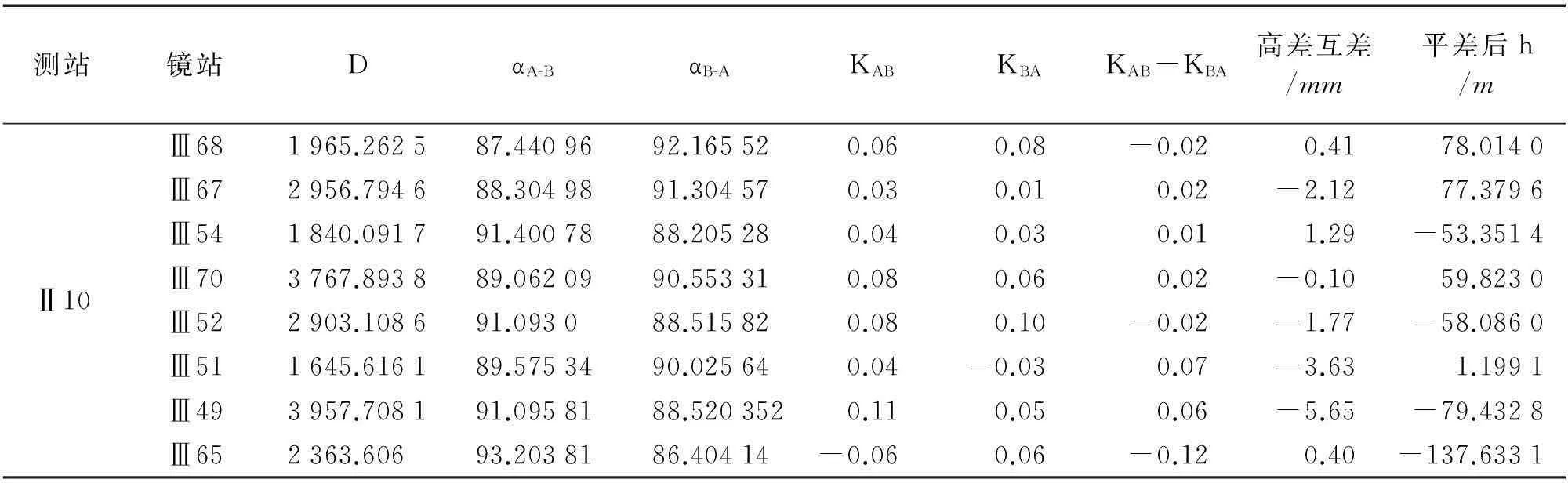
表4 各方向K值计算及高差修正
从表4计算结果看出,三角高程测量中,由于视线穿过的地形、地物不同,虽然在同一点上观测,同一测站不同方向折光系数相差悬殊,最大达0.11,最小为-0.06,一个方向的折光系数不能用于描述整个测区范围的折光场;同时也可看出,同一测线对向观测的K值变化也很大,最大为0.06,最小为-0.06,互差0.12,对向观测高差互差较大。因此以某一方向折光系数对其他方向的高差加以改正,则将引起较大差异。如果按K值的大小进行统计可以看出,K值的分布有明显的规律,它表现为正态分布,这一点从对向K残差为0.02可以看出,其符合偶然误差的特性,说明数据可用。
对比表2和表4计算所得高差互差可以看出,表2中取常用K =0.14进行高差改正,与实际折光系数误差较大,导致对向高差互差过大,且出现负高差均大于正高差的现象。表4中采用各方向动态K值进行高差改正,计算结果看出,高差互差明显减小,且正、负高差符合正态分布,满足二等水准精度要求。从三角高程网严密平差结果分析可知,采用动态K值进行高差改正的平差精度明显优于使用K=0.14进行高差改正的精度,三角形高差闭合差远远小于规范要求,与已知水准点高程差也从原来的21mm下降到7.6mm,这说明用平差后高差反演K值后二次修正高差是完全可行的。
相关研究[7]表明,早上9:00至12:00,K值由大变小,变化剧烈;12:00至16:00,K值由大缓慢变小,达最小值;16:00至18:00,K值由最小值缓慢变大;18:00 至19:00,K值由小变大,变化较剧烈;19:00至20:00,K值由小缓慢变大;20:00以后K值趋于稳定。因此天顶距观测最好的时段为夜间,此时对向K值基本一致。其次是中午12:00至18:00,此时段K值变化缓慢,也适合进行天顶距的观测。
四、结束语
水电工程地处山区,在进行精密三角高程测量代替二等水准测量时天顶距误差和大气折光系数误差对三角高程测量精度影响较大,由于大气折光变化的复杂性及测线折光系数难以测定,测量时应注意以下几个方面:
1) 通常情况下,自动目标识别具有很高的稳定性和可靠性,天顶距测量精度也优于人工测量,但在逆光、目标背景为亮白色、强反射物质或玻璃背景时,ART的可靠性和稳定性将受到极大影响,精度也明显低于人工测量。大气折射对天顶距测量也会产生一定的影响,在进行精密三角高程测量代替二等水准测量时应选择最佳观测时段,试验表明夜间观测精度最优。
2) 三角高程测量精度受大气折光影响极大,方向不同、时段不同、植被不同会导致大气折光系数不同。当精度要求不高时,三角高程测量高差改正可采用K=0.14进行改正;而距离较长、精度要求较高时,三角高改成的高差改正必须考虑大气折光影响;大气折光误差对高差改正的影响随边长增大而增大。采用本文介绍的利用三角高程平差后高差反演各方向K值,对高差进行二次修正可以有效减弱大气折光系数的影响。
3) 精密三角高程测量代替二等水准测量在牛栏江-滇池补水工程施工控制网的成功应用,为今后山区水电工程建立高精度三角高程代替二等水准测量提供了一种新的解决方案,该项目的实施验证了精密三角高程测量代替二等水准测量的可行性。为在困难地区观测条件差的情况下,进行高程数据的采集工作,开拓了新方法,有重要的推广意义。
参考文献:
[1]杨晓明,杨帆,宋玮,等.中间法电磁波测距三角高程代替精密水准测量的研究[J].测绘科学,2012,37(2): 172-184.
[2]韩昀,程新文,刘成,等.精密三角高程代替二等水准测量在山区铁路勘测中的运用[J].测绘科学,2011,36(4):106-107.
[3]沈月千,黄腾,欧乐,等.动态求解大气折光综合系数法在三角高程网中的应用[J].勘察科学技术,2013(4):42-44.
[4]郭腾龙,岳建平.测量机器人ATR性能分析与测试[J].测绘通报,2012(8): 92-94.
[5]刘念,盛新蒲.三角高程测量中大气折光影响的分析[J].测绘科学,2012,37(6):26-36.
[6]张正禄,邓勇,罗长林,等.精密三角高程代替一等水准测量的研究[J].武汉大学学报:信息科学版,2006,31(1):5-8.
[7]王文利,陈俊勇.珠峰高程测量大气垂直折光系数的研究[J].测绘科学,2007,32(4): 7-13.
[8]周清正,刘文堂,王平,等.大气折射及其对光电测量技术的影响[J].华北科技学院学报,2003,5(2): 20-24.
[9]蒋利龙,易又庆.近地层大气折光系数的新反演法[J].大地测量与地球动力学报,2005,25(4):88-90.
[10]周显平.全站仪三角高程测量及精度[J].辽宁工程技术大学学报:自然科学版,2011,30(3):717-720.
[11]齐冬梅,蔡东健,勾启泰.精密全站仪性能测试与分析[J].测绘通报,2010(2):71-73.

猜你喜欢
科技资讯(2016年33期)2017-03-31
价值工程(2017年8期)2017-03-25
中国建筑科学(2016年11期)2017-02-28
科技视界(2016年11期)2016-05-23
电脑知识与技术(2016年8期)2016-05-19
电脑知识与技术(2016年8期)2016-05-19
科技传播(2016年1期)2016-03-22
光学仪器(2014年6期)2015-01-22
现代电子技术(2014年7期)2014-04-18