MIMO网络控制系统的稳定性与控制器设计
2015-12-31 16:53马飞赵立英
计算技术与自动化 2015年3期
马飞 赵立英


摘要:对于具有多个独立传感器与执行器的多输入多输出网络控制系统,在具有多重时滞的情况下,建立一类网络控制系统的连续时间模型。通过构造一个新的李雅普诺夫函数,给出一个具有较低保守性的稳定性判据。基于该稳定性判据,给出输出反馈控制器的设计方法,数值仿真结果表明了该方法的有效性。
关键词:网络控制系统;稳定性;时滞;线性矩阵不等式
中图分类号:TP273 文献标识码:A
1引言
网络控制系统又被称为基于网络的控制系统、网络化控制系统,是一种完全网络化、分布化的控制系统,是通过网络构成闭环的反馈控制系统。如今,控制系统的规模越来越大,其程度的复杂性也越来越高,系统的物理设备和功能也在不断的扩充。传统的点对点直接连接方式已经达到了自身应用的极限,无法满足系统功能不断增长的需求。例如,在一个大型的工厂车间内,各个单元和生产线常分布于工厂各处,所有设备作为一个整体可看做是一个被控对象分散的控制系统。如果采用传统的点对点方式进行控制,则需要大量的连接专线,耗费巨大的电力和水力资源。显然,这样的工厂每天运行所耗费的成本是昂贵的。随着电子技术和计算机技术的不断发展,很多网络传输方式被应用到控制领域中。网络控制系统随之应运而生。
网络控制系统作为一门崭新的学科,是网络通信技术和自动化控制技术两个学术领域的交叉融合,具有其特殊性和复杂性。控制领域研究的内容主要是基于一定服务质量的控制网络,研究系统的控制策略和控制技术,以期提高控制系统的性能;而通信领域学者研究的内容主要是设计合适的通信协议和调度方法,以期提高网络本身的服务质量。未来的发展趋势是控制与通信的一体化设计。研究网络控制理论和控制方法既具有重要的学术价值,又具有可观的经济效益。
近年来,网络控制系统的研究受到广泛的关注。与传统点对点互连的控制系统相比,网络控制系统的主要优点为网络布线方便,连接线数大大减少,易于扩展,成本低,易安装、故障检修和维护方便,抗干扰性强,数据传输可靠性高、实现信息资源共享等优点。但是这样就不可避免的将网络传输时滞引入系统中,它会降低控制系统的性能甚至导致系统不稳定,从而使网络控制系统的分析与设计变得更加复杂。网络时延是系统设计和实现的突出问题。
本文研究一类MIMO网络控制系统时滞相关稳定性问题。文献阳研究了此类问题。本文首先建立了一类MIMO网络控制系统新的模型,通过构造新的Lyapunov函数,引入适当的自由权矩阵,利用线性矩阵不等式与稳定性理论,得到系统依赖于时滞大小的渐进稳定的条件。基于已获得的稳定性的条件,提供了一种状态输出反馈控制器设计的方法。
2系统建模与问题描述
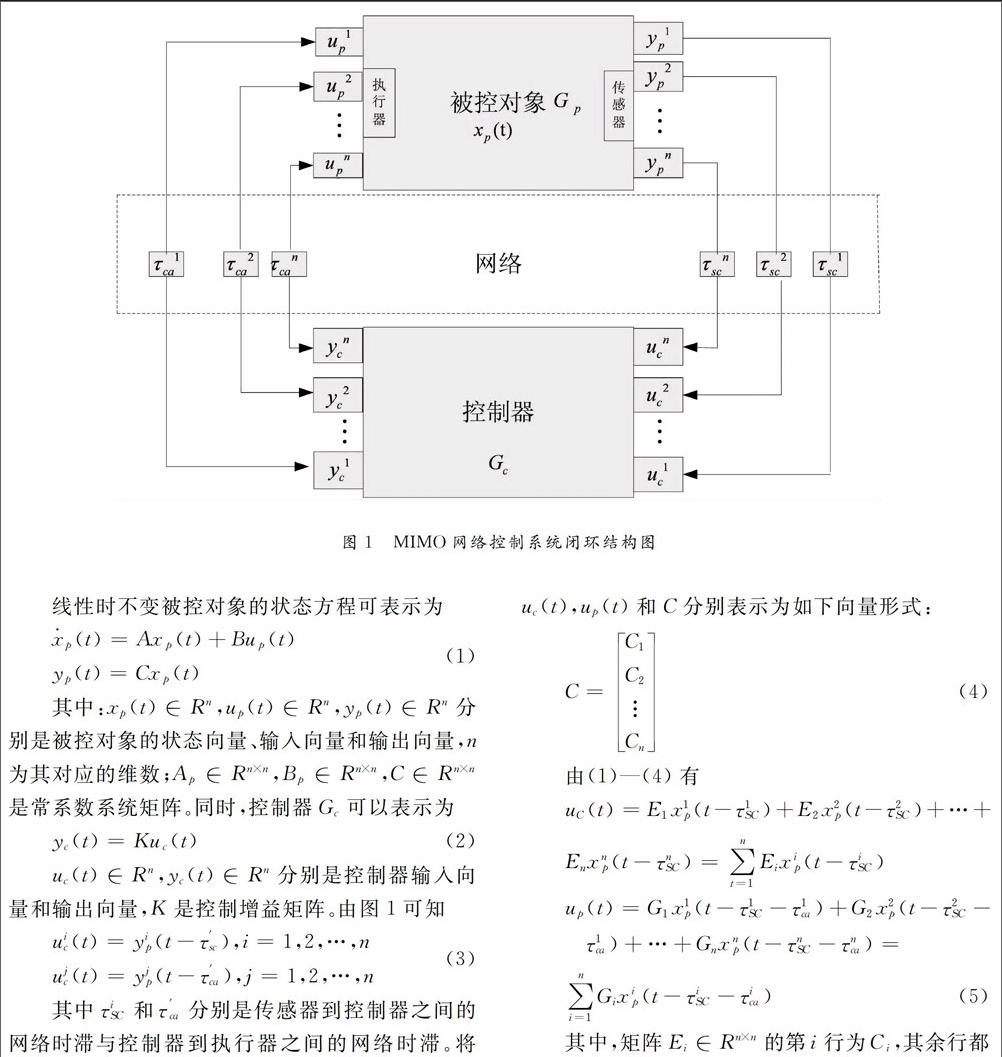
考虑一类连续的MIMO网络控制系统,该系统有多个独立的传感器与控制器。其闭环结构如图1所示:
线性时不变被控对象的状态方程可表示为别是被控对象的状态向量、输入向量和输出向量,n为其对应的维数;Ap∈Rn×n,Bp∈Rn×n,C∈Rn×n是常系数系统矩阵。同时,控制器Gc可以表示为
uc(t)∈Rn,yc(t)∈Rn分别是控制器输入向量和输出向量,K是控制增益矩阵。由图1可知为零向量,矩阵Gi∈n×n的第i行为KiCi,其余行都为零向量。则系统可以表示为
3MIMO网络控制系统的稳定性分析与控制器设计
3.1稳定性分析
本节基于构造新的lyapunov函数来分析MIMO网络控制系统(7)的稳定性。
定理1:如果存在矩阵P>0,Q>0,
(i=1,2,…,n)和适当维数的矩阵Si>0,
(i=1,2,…,n)使得下列LMI:
4仿真实例
为验证本文方法的有效性,采用文献中的例子和方法进行验证。
图2为2阶闭环系统输出反馈响应曲线,通过该图像,在所设计的控制器的反馈下,原系统实现了比较好的镇定。
5总结
本文研究了具有多时滞的MIMO网络控制系统的稳定性分析与控制器设计,通过构造一种新的laypunov函数,利用线性矩阵不等式,给出了系统稳定性的判据和控制器的设计方法。与文献相比,本文方法的保守性比较低,时滞的范围更大。与文献相比,本文给出了控制器设计的方法。仿真结果表明了该方法的有效性。
猜你喜欢
交通科技与管理(2022年8期)2022-05-07
廊坊师范学院学报(自然科学版)(2021年2期)2021-09-10
华东师范大学学报(自然科学版)(2019年5期)2019-11-11
智富时代(2018年4期)2018-07-10
智富时代(2018年4期)2018-07-10
新农业(2018年3期)2018-07-08
上海师范大学学报·自然科学版(2018年3期)2018-05-14
电机与控制学报(2018年9期)2018-05-14
今日财富(2018年34期)2018-05-14
求知导刊(2017年22期)2017-10-13