施釉机器人灵巧度分析
2015-12-31 11:08黄金凤何凯杰
机械工程与自动化 2015年4期
黄金凤,何凯杰
(河北联合大学 机械工程学院,河北 唐山 063009)
0 引言
一般在设计机器人机械结构时,应尽量使其条件数为1,这时其灵巧性最高[1],机构的运动学性能最好。Salibury和Craig利用雅可比矩阵J(q)的条件数作为评定Stanfo串联关节型机器人手爪理想尺度最优化的准则,雅可比矩阵J(q)的条件数越小,其灵巧性越好。本文对串联关节型陶瓷施釉机器人3种常用机构的灵巧度进行分析,选择出机器人运动性能最好的机械结构。
1 施釉机器人的3种常用机构
关节型机器人结构紧凑,易于防尘和密封,同时工作空间大,重量轻,而且工作起来比其他形式的机器人结构灵活[2-5],适合应用在手把手示教型施釉机器人结构上。串联关节型施釉机器人3种常用结构如图1所示。

图1 串联关节型施釉机器人3种常用结构
2 机构灵巧度分析
2.1 构造机器人雅可比矩阵
对连杆坐标系的连杆参数规定如下:ai-1为从Zi-1到Zi沿Xi-1测量的距离;αi-1为从Zi-1到Zi绕Xi-1旋转的角度;di为从Xi-1到Xi沿Zi测量的距离;θi为从Xi-1到Xi绕Zi旋转的角度。
首先利用D-H法建立结构1的连杆坐标系,如图2所示。

图2 结构1连杆坐标系
结构1各连杆参数及关节变量见表1。
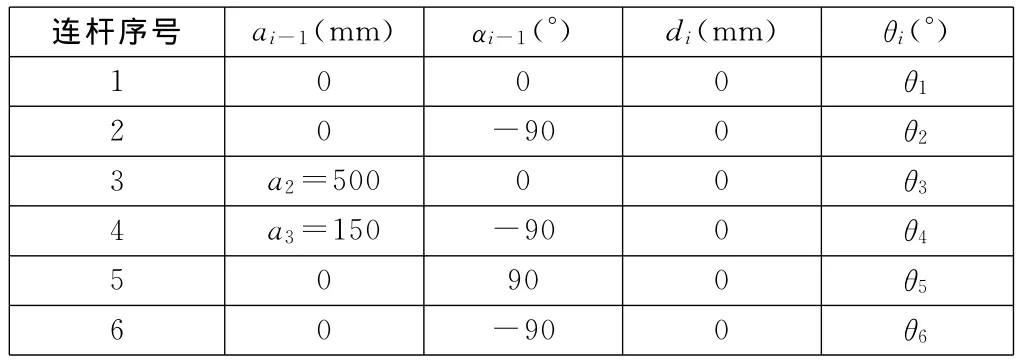
表1 施釉机器人结构1的连杆参数
连杆变换矩阵为:


其中:n为机器人自由度数。
本文用矢量积法推算出该机器人的雅可比矩阵,对于转动关节i,雅可比矩阵的第i列为:


由图2、表1和式(1)所列的连杆变换矩阵,可以计算:
(3)Z1、Z2、Z3、Z4、Z5和Z6。
(4)由式(2)和式(4)可计算1P6、2P6、3P6、4P6、5P6和6P6。
将、Zi和iP6(i=1,2,…,6)代入式(3)得到雅可比矩阵的第i列Ji:


其中:si=sinθi;ci=cosθi;s23=sin(θ2+θ3);c23=cos(θ2+θ3)。
得到结构1的雅可比矩阵J:

建立结构2的连杆坐标系如图3所示。
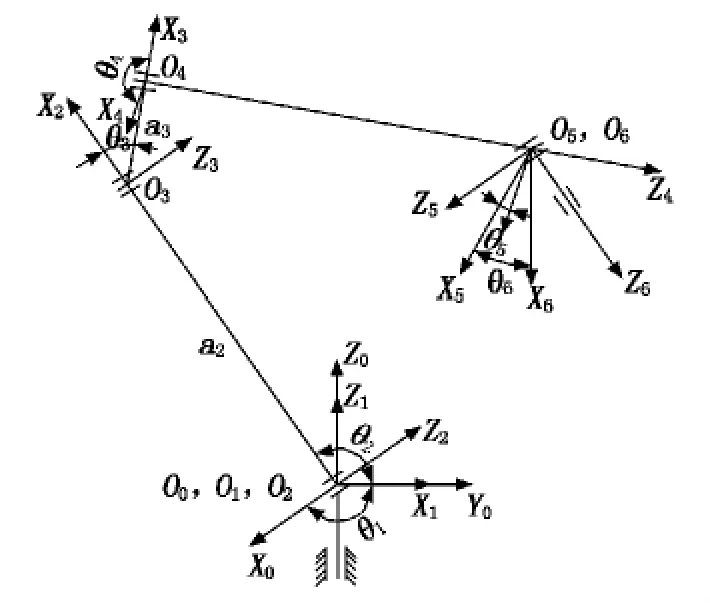
图3 结构2连杆坐标系
结构2关节数、各连杆参数及关节变量同结构1的一样,因此构造的雅可比矩阵也相同,结构2雅可比矩阵即式(11)。
建立结构3的连杆坐标系如图4所示。

图4 结构3连杆坐标系
各连杆参数及关节变量见表2。

表2 施釉机器人结构3的连杆参数
同结构1的分析过程一样,得到结构3雅可比矩阵的第i列J′i:

得到结构3的雅可比矩阵J′:

2.2 分析机器人灵巧度
由文献[1]可知条件数的定义为:

其中:‖·‖代表任意矩阵范数,通常取Euclide范数,当J(q)为满秩方阵时,J+(q)=J-(q),J+(q)表示矩阵J(q)的广义逆矩阵,J-(q)表示矩阵J(q)的逆矩阵。
根据施釉机器人结构1、2和3,可知各关节工作角度范围为:θ1∈[-π/2,π/2]rad,θ2∈[0.87,2.27]rad,θ3∈[-0.7,0.7]rad,θ4∈[-π,π]rad,θ5∈[0,2π]rad。连杆参数a2=500mm,a3=150mm。
在角度θ的取值范围内,分别取θ1=-1.5,-1.4,-1.3,…,1.5。以θ1为x轴,k1(J)为y轴,在MATLAB中生成的结构1和结构2的k1(J)函数图像如图5所示。

图5 结构1和结构2的k1(J)函数图象
以θ1为x轴,k2(J)为y轴,在 MATLAB中生成的结构3的k2(J)函数图像如图6所示。
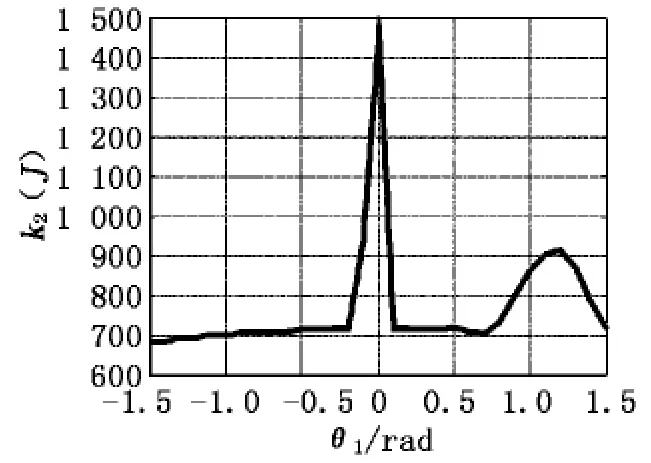
图6 结构3的k2(J)函数图象
对比图5和图6可知,常用的这3种机械结构中,结构3的灵巧性最高,运动性能最好,并且5自由度串联关节型机器人机构能够满足施釉机器人工作需要,所以结构3更适合用于手把手示教型施釉机器人的机械结构。
由图6的曲线可以看出,机器人施釉时在θ1∈[-1.5,-0.2]范围内工作最好,在此范围内对θ1、θ2、θ3、θ4进行取值,得到机器人关节的最佳工作范围,此工作范围机构灵巧度偏低,机器人最为灵活,适合手把手示教。
3 结论
本文提出了3种手把手示教型串联关节施釉机器人结构,通过对结构进行的运动学分析,分别构造出机器人的雅可比矩阵,分析得出了3种机器人的灵巧度,得到最优的手把手示教型串联关节施釉机器人的机械结构。
[1]熊有伦.机器人学[M].北京:机械工业出版社,1993.
[2]李晨辉.手把手示教型施釉机器人关键技术研究[D].唐山:河北联合大学,2010:15-22.
[3]张焕.六自由度机器人结构设计、运动学分析及仿真[D].西安:西安理工大学,2004:6-12.
[4]殷际英,何广平.关节型机器人[M].北京:化学工业出版社,2003.
[5]张进伟.四自由度平面关节型机器人结构分析与优化[D].沈阳:东北大学,2008:4-17.
猜你喜欢
军事文摘(2022年14期)2022-08-26
佛山陶瓷(2022年3期)2022-04-03
今日农业(2021年3期)2021-03-19
装备制造技术(2020年2期)2020-12-14
机械工程与自动化(2020年3期)2020-06-22
青年生活(2019年6期)2019-09-10
小学科学(学生版)(2019年5期)2019-05-21
佛山陶瓷(2018年6期)2018-09-14
汽车实用技术(2017年16期)2017-09-21
文化交流(2016年1期)2016-03-25