面向对象遥感图像处理方法在建筑物震害评估中的应用研究
2015-12-27 07:57翟永梅黄晓峰
防灾减灾学报 2015年1期
翟永梅,陈 刚,黄晓峰
(1.同济大学 上海防灾救灾研究所,上海 200092;2.同济大学 土木工程学院,上海 200092;3.嘉兴万科房地产有限公司,浙江 嘉兴 314000)
0 引言
地震给人类造成了极大的灾难和损失,是目前人类所面临的最严重的自然灾害之一。在城市地震灾害的应急救援过程中,遥感影像作为重要的信息获取平台,能够起到预警、动态监测、灾情评估、辅助决策等作用。
传统的震害信息提取技术主要采用基于像元的图像信息提取方法,是依据图像的光谱、纹理、色调等的某一项或者某几项特征单独来分割图像,精度较差。
随着高分辨率遥感影像获取技术快速发展,在基于高分辨率图像的遥感信息提取研究中,必须寻找新的能够充分挖掘高分辨率遥感影像所包含信息的图像处理技术,以期提高分类精度。面向对象的图像处理方法的出现,很好的解决了这一问题,它利用光谱统计特征、纹理、大小、形状、相邻关系等一系列因素,能够提高震害破坏程度的识别精度,从而提高震害评估的准确性,从而开拓了高分辨率遥感影像处理的新篇章。
但随着分类尺度和分类地物种类的增加,面向对象的图像处理方法计算量迅速增加,同时分类精度有所下降。如何寻求一种更加有效的、更具针对性的震害提取技术成为当前震害评估研究的一个方向。
本文拟结合都江堰市震害分析的具体实例,基于ENVIFX平台,开展基于遥感图像的建筑物震害评估的研究。
1 面向对象图像处理方法
面向对象图像处理方法最重要的特点就是以图像分割获得的影像对象为基本操作单元,而不是以像元为基本操作单元。通过图像分割获得的图像对象具有一定的属性,从二维的影像信息阵列中恢复出影像所反映的景观场景中目标地物的空间形状及其组合方式,不仅包含了光谱信息,还包括了形状特征、纹理特征和相邻关系等空间特征。空间信息和拓扑关系信息是完全属于图像对象的。在震害评估过程中并未增加外来信息,却在很大程度上提高了分类的精度,使分类结果更加接近目视判别的结果[1]。
面向对象图像处理技术中的两个核心问题是遥感影像分割和模糊分类,以下将分别对这两个问题进行研究。
1.1 高分辨率影像分割
影像分割,也叫做图像分割,是一个重要的图像分析技术,是图像分析的第一步,也是图像处理与机器视觉的基本问题之一,是将图像划分成若干互补交叠区域的集合,使区域内部所考虑的特征或属性是一致的。多年来影像分割方法的研究是影像分析领域的一大课题,一直受到人们的高度重视,至今已提出了上千种各种类型的分割算法[2]。
常用的图像分割技术大致可划分为六类[3]:
(1)自顶向下分割,如直方图阈值分割,或基于最大后验概率(MAP)的最优分类;
(2)基于边缘检测的分割;
(3)区域生长与合并;
(4)自底向上的迭代像元聚类,如模糊C均值方法(FCM),基于马尔柯夫随机场(MRF)的聚类,基于神经网络的聚类;
(5)主动轮廓模型(ACM)方法;
(6)全局优化方法,如基于能量函数,贝叶斯公式,或最小描述长度(MDL)的分类方法。
本文利用ENVI软件的特征提取模块“面向对象空间特征提取模块—Feature Extraction”,根据临近像素亮度纹理颜色等对影像进行分割,是一种基于边缘的分割算法[4]。
1.2 多特征模糊分类
分类一般是指按照某类描述将影像对象赋予某一类[5]。因此,类描述就是对类的典型特征或条件的描述,按它们是否满足这些属性或条件来进行分类。
模糊分类是除了神经网络和概率法之外一种典型的分类,以模糊集合论为基础,针对不确定性事物的分析方法。对一个事物分类时,它是把此像元的类型特征值转换成[0,1]之间的模糊值,不像传统分类方法那样硬性地把它归为某一类,以此来表明对于某一特定类的隶属度[6]。
在震害评估中,地震灾害损失主要指破坏性地震对人工建造环境破坏所造成的人员伤亡和经济损失等。建筑物是最主要的人工建造环境,地震造成的建筑物受损情况是评估地震引发的经济损失、人员伤亡和社会功能受损状况的主要标准。因此,本文提出一种针对城市建筑物震害评估的新方法,通过阈值分类和掩膜技术去除植被、河流和道路,然后对建筑物(包括倒塌建筑物和完好建筑物)目标进行单尺度和多特征的面向对象震害评估,这一方法弥补了通常的面向对象遥感图像处理技术因尺度类型的增加所导致分割精度降低和计算量增大的缺陷。
2 震害评估实例
针对城市的复杂特征,本研究对城市地物进行了细致的分析,先对局部区域进行了震害评估,然后再将范围扩大,以验证本文分析方法的稳定性。

图1 都江堰局部遥感影像图Fig.1 Local remote sensing images of Dujiangyan

图2 经过提取后的目标区域Fig.2 The target area after extraction
取汶川地震都江堰市某个街区为实验区,进行精度验算。使用的影像为经过前处理的三波段IKONOS融合图像,分辨率为1米,见图1和图2。
本文采取单尺度、多特征的面向对象震害评估方法。对于某一种特定的地物,在一个特定的尺度上能够更加有效地被发现与研究,在观测地表实体并试图理解他们之间的关系时,应当选择最优尺度[7]。同时,分类时不仅依靠地物的光谱特性,也要综合考虑光谱统计特征及形状、大小、纹理等一系列相关特征,通过模糊分类模拟人的思维,并通过人机交互构建知识库,自动提取出符合实际目标地物。
本次研究的目标为各类建筑物,通过图像的前处理,将非目标对象的植被、河流和道路去除。采用的分割尺度参数为适合建筑物的最佳分割尺度,取18,区域合并度取95%。
2.1 都江堰市局部面向对象的震害提取
2.1.1 纹理规则
纹理信息参数比较多,为了更好更直观的进行比较,本文选取一训练区,对遥感图像震害纹理信息和光谱信息进行选择研究,分别圈定完好建筑物区域和倒塌建筑物区域,用ENVI进行纹理和光谱信息计算。(注:黄色框为完好区域,红色框为倒塌区域)
由表1可知基于灰度共生矩阵(GLCM)的纹理分析方法的常用纹理测度和纹理方差(Variance)在完好区域和倒塌区域中差别较大。所以取纹理均值纹理方差(Variance)来区分完好建筑和倒塌建筑。
2.1.2 灰度规则
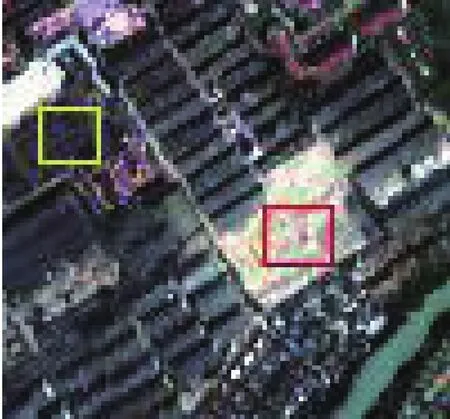
图3 分类特征训练区Fig.3 The training area with classification characteristics
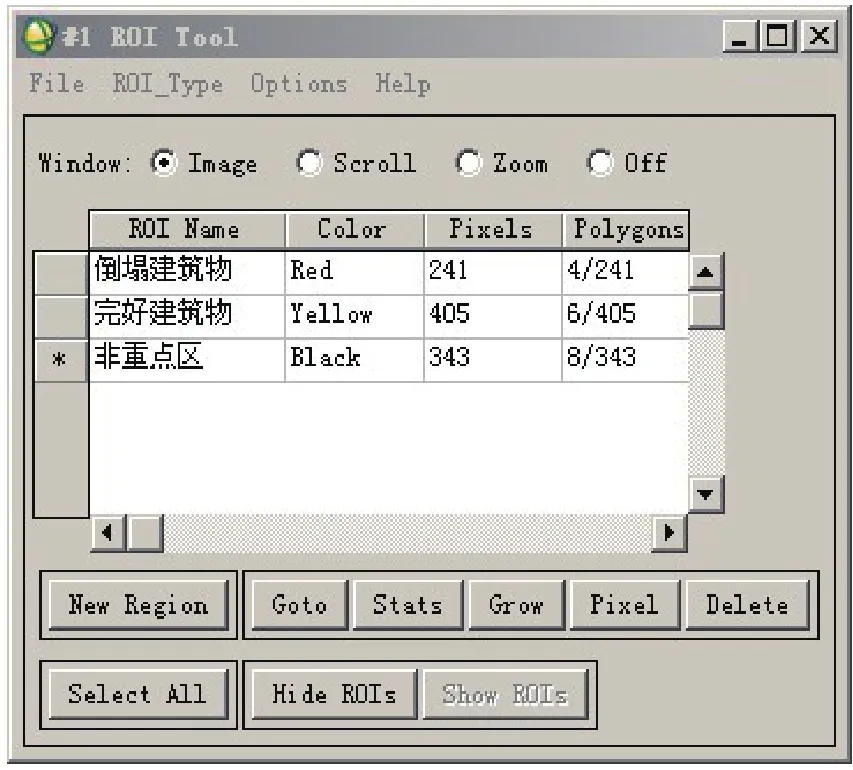
图4 基于像元分类类别定义Fig.4 The classification categories based on pixels

表1 图像增强评价参数
曹代勇等[8]根据1976年唐山地震时期的黑白航空像片不同类型训练区的统计分析结果表明,灰度平均值、灰度标准差和灰度方差3种特征参数是建筑物震害识别和分级的良好指标。故本研究选取灰度平均值、灰度标准差和灰度方差3种灰度特征值。
2.1.3 几何规则
通过反复实验,几何特征参数选取Envi Zoom中的延伸度(ELONGATION)、矩形形状的度量(RECT_FIT)和面积(Area)。
模糊参数设定 本研究中,各规则模糊容限设定为5%,隶属函数选取S-type。

图5 样本数据选择Fig.5 Sample selection
2.2 都江堰市局部基于像元震害提取
为了说明面向对象震害提取的优势,本研究中对相同地物进行了基于像元的震害提取。如图4和图5所示,首先定义要分类的三个类别,然后选定每个类别的样本数据,再分析每个类别中样本的特征,并应用于整个影像。
基于像元分类的类别定义是单纯的一种样本库的建立,各个类别之间除了并列的存在,没有其它相互关系。并且在分析过程中,两个类别之间的划分是一分为二的。而本文中的面向对象的分类是基于模糊分类规则的,结合了多特征和模糊分类,在分类过程中最大限度的模拟了人类的思维。
2.3 都江堰市局部震害分类结果比对与精度评价
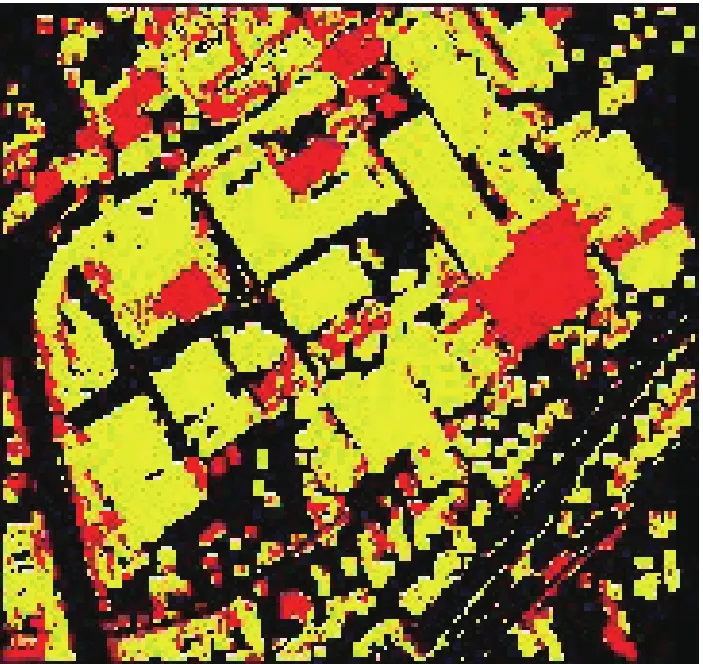
图6 基于像元分类Fig.6 Classification based on pixel
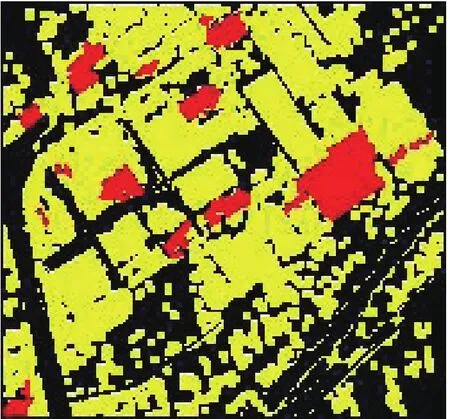
图7 面向对象分类Fig.7 Object-oriented classification
分别应用基于像元和面向对象的两种分类方法对同一研究对象进行分类,得到下图6与图7的分类结果图。图中红色为倒塌建筑物,黄色为完好建筑物,黑色为非目标区域。从视觉上判断,基于像元的分类地物破碎,不易理解,而面向对象的分类结果规则整体化,每一个类别都很清晰。
为了进一步分析比较分类的效果,就要对遥感图像分类后的结果进行精度评价。分类精度是指分类图像中的像元被正确分类的程度。在遥感分类精度评价中,最常用的是Congalton在1991年提出的混淆矩阵(Confusion Matrix)[9]。混淆矩阵的定义如下:
式中,mij表示试验区内属于i类的像素被分到j类中去的像素总数,n为类别数。如果混淆矩阵中对角线上的元素值越大,则表示分类结果的可靠性越高,如果混淆矩阵中非对角线上的元素值越大,则表示错误分类的现象越严重。
本文主要采用以下两项混淆矩阵中的评价指标[10]:
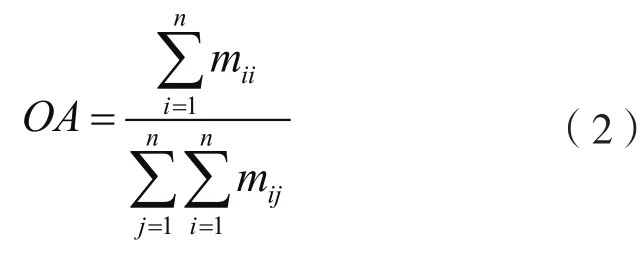
总体分类精度(Overall Accuracy):指总正确分类数占总抽样数的比例,它反映了分类结果总的正确程度。利用混淆矩阵可以表示为:
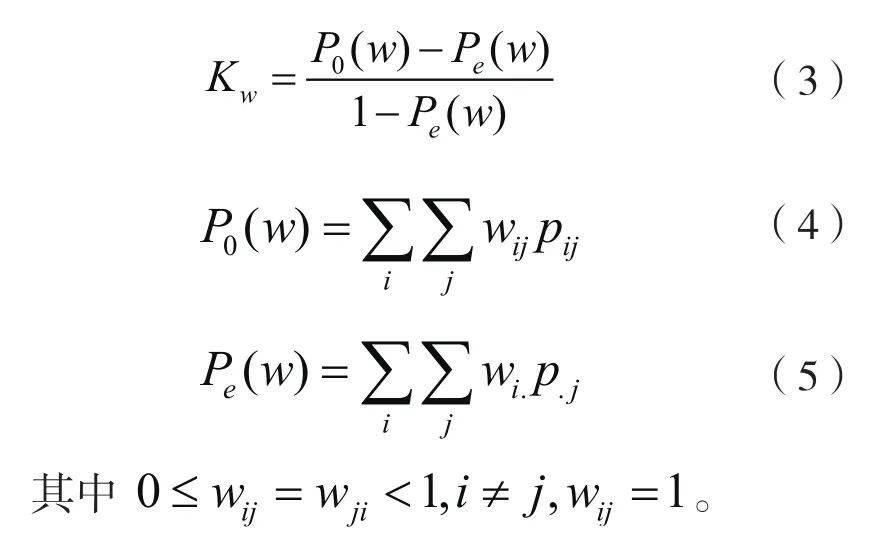
Kappa系数(Kappa Coefficient):Kappa系数全面的利用了混淆矩阵的信息,可作为分类精度评价的综合指数。
Kappa计算公式:
进行精度评价时,首先要建立精度评价混淆矩阵。本文中的混淆矩阵以建筑物单体为基本单位,通过目视判读逐个确定建筑物单体的参考值(真实类别),并逐个读取计算机自动判别的建筑物单体类别,最后建立混淆矩阵。
基于以上建立混淆矩阵的方法建立混淆矩阵,并得到了定量化的精度评价,如下表3及表4所示。计算得到基于像元的总体分类精度为84.8%,Kappa统计量为0.590;面向对象的总体分类精度为 97.0%,Kappa统计量为0.884。根据表2可知面向对象和面向像元都得到了较好的分类精度,但总体上,面向对象方法精度高于面向像元方法。
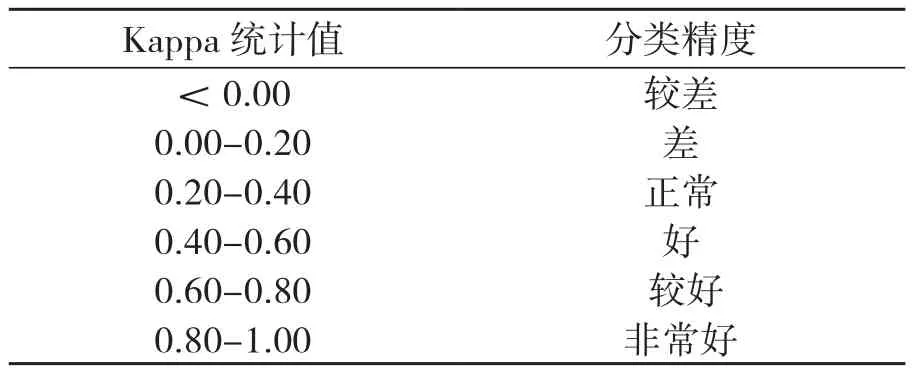
表2 kappa统计值与分类精度对应关系[11]
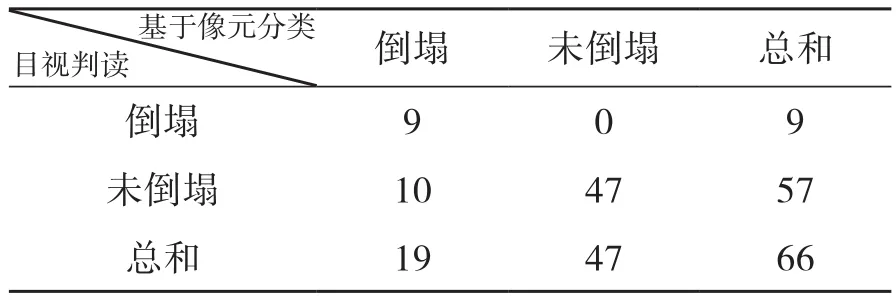
表3 基于像元震害评估混淆矩阵
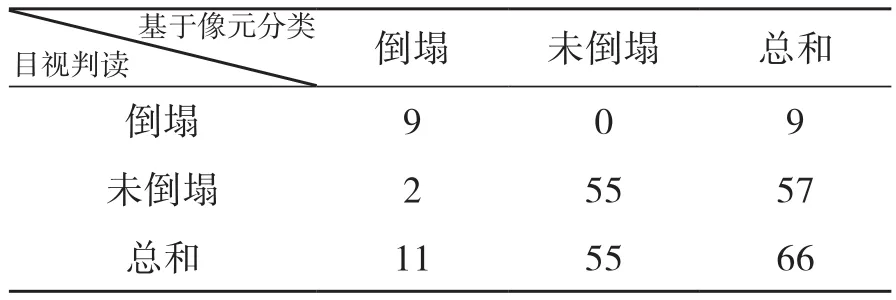
表4 基于对象震害评估混淆矩阵
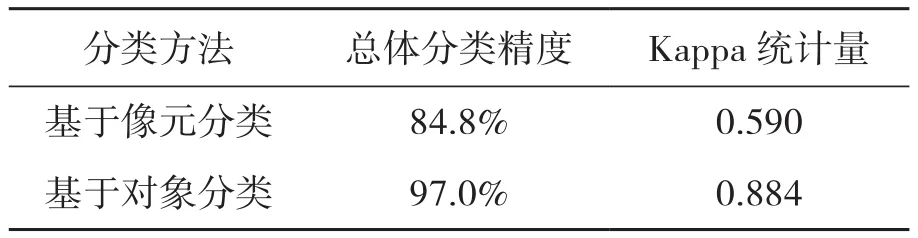
表5 基于像元和基于对象震害评估精度比较
2.4 都江堰城区建筑物震害提取的稳定性验证
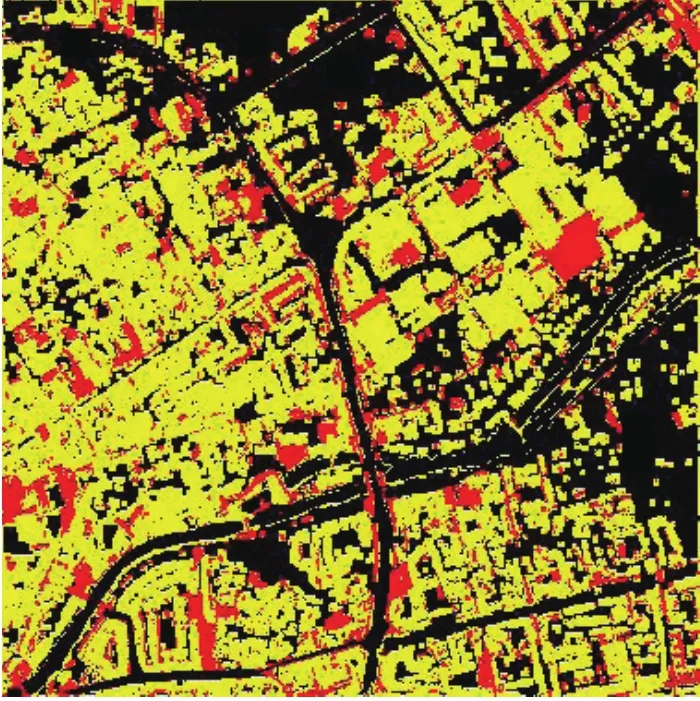
图8 基于像元分类Fig.8 Classification based on pixel
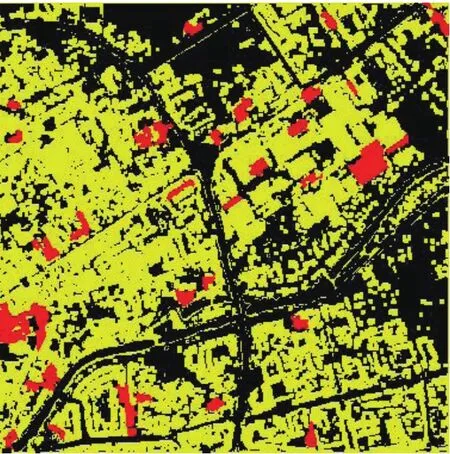
图9 面向对象分类Fig.9 Object-oriented classification
为了验证分类结果的稳定性,本研究中又选取一块范围较大、地物更加丰富的影像,利用上述选取的参数和分类方法对其进行分类,验证上述模型参数的稳定性,图8与图9为分类结果图。
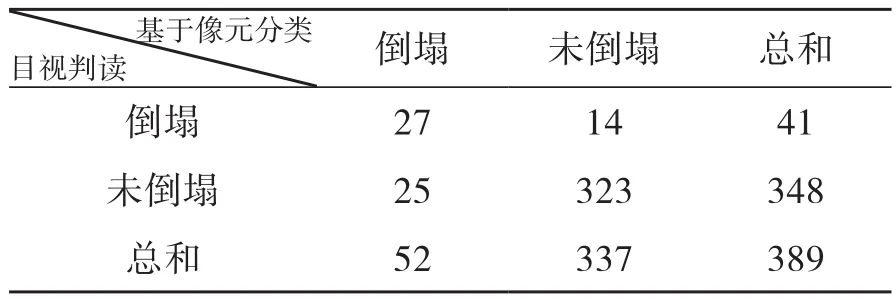
表6 基于像元震害评估混淆矩阵
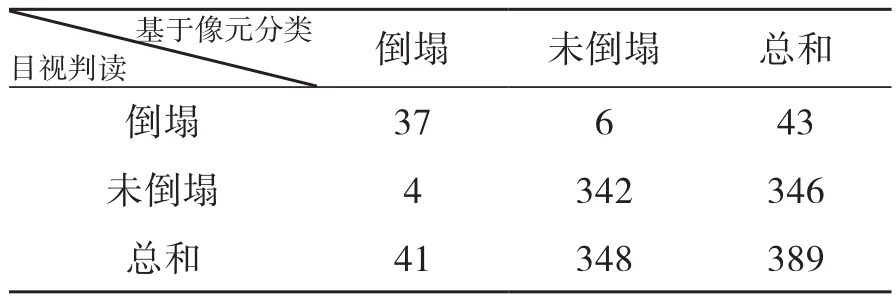
表7 基于对象震害评估混淆矩阵

表8 基于像元和基于对象震害评估精度比较
分类规则与分类方法基本相同,只是增大了研究面积。同样的,研究中也采用了基于像元的方法和基于对象的方法,并将两者进行了对比。
两种分类的误差矩阵如表6和表7所示。从精度评价结果可以证实,虽然,由于范围扩大和地物类型增加,面向对象的分类方法在地物复杂和区域较大的范围精度也有所下降,但不论是总体分类精度和Kappa统计量,都在一个可以接受的误差范围内;而基于像元的分类在表面上与总体分类精度差距不大,但是更为客观的精度评价Kappa统计分析中,却显著下降,由原本就不高的0.590下降到0.534。所以基于像元的分类精度远远不及面向对象的分类精度,错分、漏分现象严重,结果不稳定。
3 结论
本文研究了基于遥感图像的建筑物震害评估技术,介绍了图像分割方法和模糊分类方法,提出了单尺度、多特征的面向对象震害评估方法。以都江堰地区为示例,分别采用改进后的面向对象方法、传统的面向像元的方法和目视判读方法进行比较,分析计算精度和稳定性。结果表明改进后的方法简单、快速且精度较高,具有良好的适用性和稳定性。
[1]赵福军.遥感影像震害信息提取技术研究[D].北京:中国地震局工程力学研究所,2010.
[2]Matsuyama.K.Current Account Dynamics in a Finite Horizon Model[J].Journal of International Economics,1987:299-313.
[3]赵宇鸾,林爱文.基于面向对象和多尺度影像分割技术的城市用地分类研究-以武汉市城市中心区为例[J].国土资源科技管理,2008,25(5):90-95.
[4]沈阳.基于形态学的图像边缘检测技术研究[D].成都:电子科技大学,2008.
[5]关元秀.高分辨率遥感卫星处理指南[M].北京:科学出版社,2008.
[6]曾志远.遥感图像大气校正方法综述[J].遥感信息,2005,(4):66-70.
[7]赵玉涛.景观异质性研究评述[J].应用生态学报,2002,13(4):495-500.
[8]尹京苑,柳稼航,单新建.基于图像结构信息的城市房屋震害特征自动提取技术[J].遥感信息,2004,12(1):27-30.
[9]Congalton,R.G.A Review of Assessing the Accuracy of Classifications of Remotely Sensed Data[J].Remote Sensing Environ, 1991,37:35-46.
[10]Stehman.S.V.Selecting and Interpreting Measures of theMatic Classification Accuracy[J].Remote Sensing Environ, 1997,62:77-89.
[11]Richards.J.A.Classifier Performance and Map Accuracy[J].Remote Sensing Environ, 1996, (57): 161-166.
猜你喜欢
铁道建筑技术(2021年4期)2021-07-21
软件(2020年3期)2020-04-20
小学生学习指导(低年级)(2019年9期)2019-09-25
摄影之友(影像视觉)(2018年12期)2019-01-28
电子测试(2018年15期)2018-09-26
电测与仪表(2017年24期)2017-12-19
Coco薇(2017年8期)2017-08-03
Coco薇(2015年5期)2016-03-29
现代计算机(2016年12期)2016-02-28
小天使·二年级语数英综合(2015年12期)2015-12-04