旋转降落伞系统角运动及稳定性分析
2015-12-26 06:35:56马晓冬刘荣忠吕胜涛
弹道学报 2015年2期
马晓冬,郭 锐,刘荣忠,吕胜涛
(南京理工大学 智能弹药技术国防重点实验室,南京210094)
旋转伞是一类具有非轴对称结构的降落伞,充满时伞衣形成与旋转方向一致的排气口。旋转伞在空中下落时,流入伞衣的气流从排气口排出,产生的反作用力矩使伞衣绕伞轴旋转。伞衣的高速旋转使带旋转伞的伞物系统下降时具有良好的稳定性[1]。随着兵器技术、航空航天技术的飞速发展,旋转伞作为气动力减速器得到了广泛应用,如末敏子弹的减速导旋主伞[2]等。
作为重要的减速装置,降落伞具有良好的运动稳定性是其可靠工作的必要条件,所以伞物系统的稳定性研究十分重要。文献[3-4]通过理论建模,对运动方程线性化处理,给出了物伞系统平面运动的稳定性判据。文献[5]建立了伞舱系统刚性连接和弹性连接时的数学模型,分析了降落伞侧向力系数、吊带长度、降落伞和载荷质量比及吊带性质对系统运动稳定性的影响。可发现,已有运动稳定性研究多关注结构轴对称的降落伞,对旋转伞运动稳定性的研究甚少。虽然文献[1]指出旋转伞由于高速旋转而具有良好的稳定性,但其运动稳定性的相关规律还有待探索。
为了了解旋转伞的运动稳定性,本文从理论建模出发,建立旋转伞-载物系统角运动的数学模型,研究系统主要参数对运动稳定性的影响。
1 旋转降落伞系统运动方程
1.1 基本假设
旋转伞系统简图如图1所示。处于平衡状态的旋转伞系统受到小扰动时,旋转伞的充满形状及其与载物间的相对位置不发生明显变化,故运动稳定性分析时,采用如下假设:
①旋转伞和载物均为刚体,且二者刚性连接。②只考虑旋转伞的空气动力,气动力参数为常数,旋转伞的压心与质心位置重合。③载物为一圆柱体,其轴线与伞轴重合。④不考虑风的影响。

图1 伞弹系统结构简图
1.2 坐标系
地面坐标系O0xyz,原点为初始时刻系统质心在地面的投影,O0x轴沿水平线指向系统运动方向,O0y轴竖直向上,O0z轴按右手法则确定。
速度坐标系Ox2y2z2,O为系统质心,Ox2轴沿系统质心速度矢量v的方向,Oy2轴垂直于速度向上,Oz2轴按右手法则确定。其相对于O0xyz的方位由速度高低角θa和速度方位角ψ2确定,转动角速度为

伞轴坐标系Oξηζ,Oξ为伞轴,Oη轴垂直于伞轴向上,Oζ按右手法则确定。其相对于O0xyz的方位由伞轴高低角φa和伞轴方位角φ2确定,转动角速度为

在伞轴坐标系中,系统相对于伞轴Oξ的自转角为γ,则系统的总角速度为

速度坐标系到伞轴坐标系的转换矩阵为

式中:δ1为高低攻角,δ2为方向攻角。则旋转伞质心速度在速度坐标系中的投影为

式中:Lp为旋转伞质心位置向量,在伞轴坐标系中Lp=(-lp0 0)T。
1.3 受力分析
系统所受外力包括旋转伞空气阻力、升力、重力和载物重力,外力矩包括旋转伞导旋力矩、极阻尼力矩、赤道阻尼力矩和外力产生的力矩。
将系统外力向速度坐标系投影。旋转伞空气阻力和升力分别为

式中:ρ为空气密度,S为旋转伞特征面积,Cx为旋转伞阻力系数,C′y为旋转伞升力系数导数,I为伞轴方向单位向量。
系统重力为

式中:mp、mb和ma分别为旋转伞质量、载物质量和伞附加质量。
力矩在伞轴坐标系中表示。导旋力矩为

式中:l为旋转伞特征长度,mxw为导旋力矩系数。极阻尼力矩为

式中:m′xz为旋转伞极阻尼力矩系数导数,d为特征直径。
赤道阻尼力矩为

式中:m′zz为旋转伞赤道阻尼力矩系数导数。
旋转伞阻力、升力及伞物的重力对系统质心的合力矩为

载物质心矢量在伞轴坐标系中表示为Lb=(lb0 0)T。
1.4 运动方程
1.4.1 系统质心运动方程
地面坐标系中,根据质心运动定理,旋转伞系统质心的运动方程为

向速度坐标系Ox2y2z2上投影,由于v,则质心运动方程为
1.4.2 系统转动方程
根据动量矩定理,旋转伞系统绕质心的转动方程为

式中:J为系统的转动惯量矩阵,在伞轴坐标系中,有:
式中:JA为系统赤道转动惯量,JC为极转动惯量。
2 角运动方程的建立
用复摆动角Φ和复偏角Ψ来描述旋转伞系统的角运动[6],其中:

设θi为理想弹道倾角,即理想弹道的速度方向与基准坐标系O0x的夹角,因为旋转伞系统理想弹道的速度方向为竖直向下,所以θi=-90°。小扰动时,扰动弹道接近理想弹道,令θa=θi+ψ1=-90°+ψ1,φa=θi+φ1=-90°+φ1。φ1,φ2,ψ1,ψ2,δ1,δ2均是小量。
引入符号:
2.1 复偏角方程
当伞物系统在平衡位置附近时,假设1和2为小量,将受到的外力代入式(3)和式(4),略去高阶小量,得:
第二式乘以i与第一式相加得复偏角方程:

式中:Δ=δ1+iδ2为伞系统复攻角。
由于

式中:X为任意变量,s为弧长。故可将式(10)的自变量从时间改为弧长:

2.2 复摆动方程
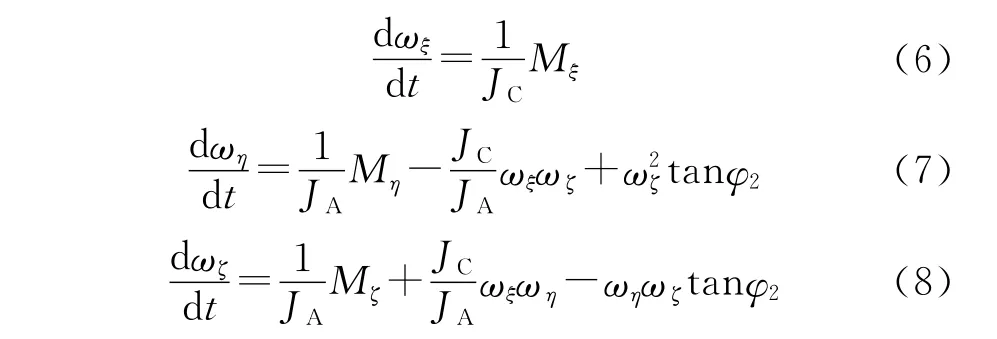
旋转伞自转角速度一般为3~6r/s,远大于横向摆动角ωζ,且tanφ2为小量,故ωξ≈。在平衡位置附近时,/dt=0,得
将系统受到的力矩及ωζ≈=、ωη=-代入式(7)和式(8),并略去高阶小量,得:
将第一式乘以(-i)与第二式相加,得复摆动角方程:

利用式(11),将式(14)转化为

3 角运动及稳定性
3.1 角运动分析
将Δ=Φ-Ψ代入式(12)和式(15),得:

取系统主要参数:Cx=1.1,lp/lb=1.2,C′y=0.03,m′zz=0.02,mxw=1,m′xz=0.3,mp/mb分别取0.15 和 0.25,系统初始扰动:Φ0=0.7°ei30°=0.61°+i0.35°,Φ′0=0,Ψ0=0.5°ei30°=0.43°+i0.25°。
图2为给定系统参数下的攻角变化情况。mp/mb=0.15时,δ1和δ2约在s=20m 处衰减至0,旋转伞系统较迅速地达到平衡位置Δ=0,复攻角变化情况如图3所示。mp/mb=0.25时,δ1和δ2在平衡状态附近震荡变化,振幅有变大的趋势,复攻角不会达到平衡位置,系统不稳定。继续增大mp/mb,δ1和δ2发散速率增大,伞系统最终发生翻滚。
可见,系统参数影响着旋转伞系统的角运动。欲使旋转伞系统具有良好的运动稳定性,受到初始扰动时其角运动能很快地衰减至0,需掌握系统参数对系统角运动的影响规律。

图2 系统攻角变化

图3 复攻角变化
3.2 系统参数对稳定性的影响
系统的平衡位置为Φ=0,Ψ=0,则方程组(16)即系统角运动扰动方程,其特征方程为

式中:

欲使旋转伞系统稳定,扰动方程的特征根必须都具有负的实部。由于特征方程系数含有虚数,稳定性判据的理论求解困难,故对特征方程(17)进行数值求解,得到特征根。对于具有运动稳定性的系统,扰动衰减至0的速率主要取决于特征值最大实部λp的数值大小。λp<0,且其它参数一定时,|λp|越大,扰动衰减越快,则系统稳定性越好。
图4给出旋转伞阻力系数和导旋力矩系数对λp的影响。当Cx<2.0时,λp为负值,说明在选定系统参数下,旋转伞系统具有运动稳定性。随着Cx的增大,|λp|先增大后减小,在Cx=1.0附近取极值|λp|max。当Cx较小时(本例中小于1.0),mxw对λp无明显影响。在Cx=1.0附近时,mxw越大,即系统的稳定转速越高,|λp|max越小,λp变化越平缓。特别地,当mxw=0时,|λp|max最大,但这并不是说明转速越高,系统稳定性越差。因为旋转降落伞的阻力系数要比其他一般非旋转伞要高,如涡环旋转伞的阻力系数为0.95~1.55,而一般非旋转伞的阻力系数只有0.3~0.9[1,7],所以通过调整设计旋转伞的结构,可较容易地使Cx落在极值位置的附近,进而使系统扰动衰减速率大于非旋转伞。当Cx很大时(大于极值点),mxw越大,|λp|越小,但大部分降落伞的阻力系数达不到如此大的数值。所以,与非旋转伞相比,旋转伞具有更好的运动稳定性,而且在旋转伞阻力系数变化范围内,转速越高,|λp|变化越平缓,即稳定性受阻力系数的影响越小。

图4 λp与mxw的关系
图5 为旋转伞特征长度与直径关系对λp的影响。可看出,增大l/d,|λp|max减小,相对应的Cx也减小,且减小幅度很大。所以,当旋转伞阻力系数较小时,应增大旋转伞特征长度;当旋转伞阻力系数较大时,应尽量减小其特征长度。
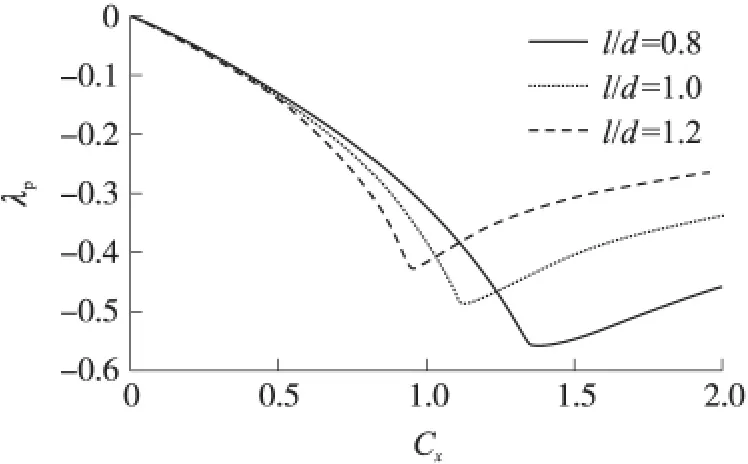
图5 λp与l/d的关系
图6 给出旋转伞与载物质量关系对λp的影响。减小mp/mb,|λp|max先增大后减小,且相对应的Cx增大。当mp/mb很小时(如小于0.05),λp始终为负值,系统具有运动稳定性,但|λp|max对应的Cx大于旋转伞阻力系数的变化范围,故系统扰动衰减较慢。当mp/mb很大时(如小于0.15),|λp|相对较小,系统稳定性较差。继续增大mp/mb(如等于0.25),在Cx=1附近,λp将变为正值,系统不具备运动稳定性。所以,对于结构确定的旋转伞,可通过调节载物质量,使|λp|max与旋转伞的Cx正好对应,从而运动稳定性达到最优。
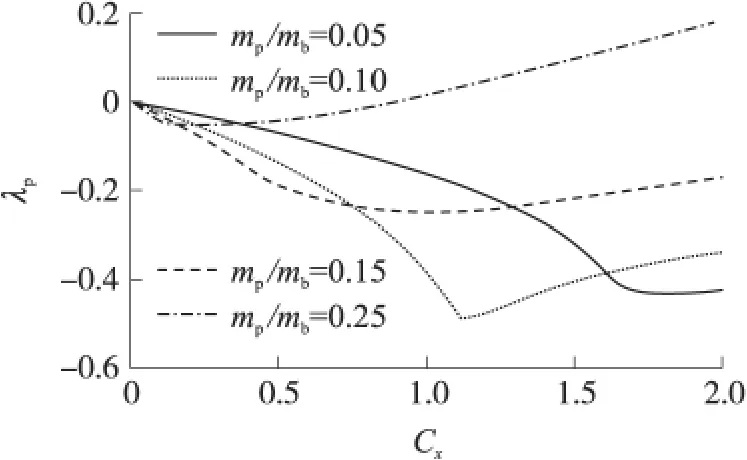
图6 λp与mp/mb的关系
4 结论
本文基于经典弹道方程,在小扰动的条件下,建立旋转伞系统的复偏角方程和复摆动角方程,通过角运动扰动方程的特征值研究系统的运动稳定性。
①旋转降落伞的运动稳定性优于结构轴对称的非旋转降落伞,转速越高,旋转伞系统稳定性受阻力系数影响越小。
②为提高系统扰动衰减速率,当旋转伞阻力系数较小时,应增大旋转伞特征长度;当旋转伞阻力系数较大时,应尽量减小其特征长度。
③相对于旋转伞,载物质量过大时,系统总是稳定的,但系统受到扰动后达到稳定状态时间长;载物质量过小时,系统出现不稳定现象;实际应用中,要选取合适的旋转伞和载物质量,使系统在较短的时间内达到稳定状态。
④旋转伞系统运动稳定性的好坏与旋转伞阻力系数关系密切。在设计及应用中,可根据旋转伞阻力系数设定系统其他参数,使旋转伞系统具有良好的运动稳定性。
[1]王利荣.降落伞理论与应用[M].北京:中国宇航出版社,1997.WANG Li-rong.Theory and application of parachute[M].Beijing:China Astronautic Publishing House,1997.(in Chinese)
[2]王国平,芮筱亭,张弛,等.远程火箭末敏弹弹道特性仿真[J].弹道学报,2011,23(4):1-4.WANG Guo-ping,RUI Xiao-ting,ZHANG Chi,et al.Simulation of ballistic characteristics of long-range-rocket target-sensitivity-projectile[J].Journal of Ballistics,2011,23(4):1-4.(in Chinese)
[3]李大耀,李大治.物-伞系统运动方程与稳定性判据[J].中国空间科学技术学报,1994,15(1):8-17.LI Da-yao,LI Da-zhi.Motion equations and stability criteria of body-parachute system[J].Chinese Space Science and Technology,1994,15(1):8-17.(in Chinese)
[4]李大耀,李大治.物-双伞系统运动方程与稳定性判据[J].宇航学报,1997,18(4):93-97.LI Da-yao,LI Da-zhi.Motion equations and stability criteria of body-parachutes system[J].Chinese Space Science and Technology,1997,18(4):93-97.(in Chinese)
[5]王海涛,郭叔伟,秦子增.降落伞特性对伞舱系统运动稳定性的影响[J].航天器工程,2009,18(2):68-73.WANG Hai-tao,GUO Shu-wei,QIN Zi-zeng.Influence of character of parachute on stability of parachute-cabin system[J].Spacecraft,2009,18(2):68-73.(in Chinese)
[6]韩子鹏.弹箭外弹道学[M].北京:北京理工大学出版社,2008.HAN Zi-peng.Exterior ballistics of projectile and rocket[M].Beijing:Beijing Institute of Technology Press,2008.(in Chinese)
猜你喜欢
数学物理学报(2022年4期)2022-08-22 04:06:36
数学物理学报(2019年4期)2019-10-10 02:38:56
小溪流(画刊)(2017年11期)2018-01-09 19:15:50
山东青年(2016年12期)2017-03-02 18:22:48
创新作文(1-2年级)(2016年12期)2016-12-26 12:48:40
贵州师范学院学报(2016年3期)2016-12-01 03:53:52
光学精密工程(2016年6期)2016-11-07 09:08:02
航天制造技术(2016年6期)2016-05-09 08:32:51
探测与控制学报(2015年4期)2015-12-15 15:00:56
电源技术(2015年11期)2015-08-22 08:50:38