认知风格对驾驶行为影响的眼动研究
2015-12-25 13:16胡誉龄施利承
心理技术与应用 2015年11期
胡誉龄 施利承


摘要 目的:比较两种认知风格在虚拟驾驶中是否存在差异,并结合两种认知风格的特点,补充解释交通事故频发的原因,同时也为国内驾驶员培训提供新思路。方法:运用Smart Eye眼动仪观察两种认知风格被试在兴趣区内的注视时间、注视次数,记录其在模拟驾驶过程中的实时速度、最大减速、刹车反应时等。结果:两种认知风格的被试在驾驶过程中,兴趣区内的注视次数存在显著差异(p=0.005),注视时间不存在显著差异(p=0.098)。在压力情境下,被试的实时速度(p=0.033)和最大减速(p=0.014)存在显著差异。结论:场独立者对兴趣区的注视次数更多,在相同条件下更能注意到交通环境中的关键信息。在压力情境下,驾驶者的实时速度显著提高,有更多的刹车等紧急行为。
关键词 场独立;场依存;模拟驾驶;眼动研究
分类号 B849
随着我国经济社会的快速发展,车辆数目剧增,同时,交通事故发生率也大幅提高。据公安部交通管理局统计,2014年一季度全国共发生涉及人员伤亡的道路交通事故4万多起,造成约4.4万人受伤,1.05万人死亡,直接财产损失达2.1亿元。大量道路交通事故的发生对社会安定及人民生命财产造成巨大损失。驾驶员安全行车的重要条件之一就是视觉信息的处理,而驾驶员不同的认知风格,会导致信息处理的不同方式和结果。
场独立(Field-independent)与场依存(Field-dependent)两种认知风格是由美国心理学家Herman A.Witkin最先提出的。个体知觉所及客观世界的全部组织结构被称为一个“知觉场”。有些人在知觉某一对象时,常常将它从整个知觉场中分离出来,倾向于以分析的态度接受外界刺激,对该对象的认知较少受环境因素影响,这些人属于场独立型人格。另一些人则相反,在知觉某一对象时,很难将其从整个知觉场中分离出来,倾向于以整体的方式看待对象,对该对象的认知很容易受环境因素影响,这些人属于场依存型人格。场认知风格的特点包括普遍性、稳定性、发展性和渗透性,其研究领域涉及教育、认知、记忆、阅读、创造力等。
Harano和Peck(1968)的研究发现,场依存型人格的驾驶员比场独立型人格的驾驶员更容易发生交通事故。Ernest,Ghezel-Ayagh和kush(1996)认为,场独立型驾驶员能较好地将有限的心理资源分配到重要的交通信息中,发现潜在的危险,从而获得对危险情境的合理解释并提早做出防御措施。反映在眼动指标上,即注视次数比场依存型驾驶员多。相比之下,场依存型驾驶员的信息提取和组织能力较差,对信息的搜索是游离式的,因而注视次数较少。梁亮和吴家舵(2010)研究了场认知风格对体育广告注视的影响,结果发现:认知方式影响注视点的数目和平面广告兴趣区内的注视时间,但在眼跳最大幅度上,场独立被试和场依存被试没有显著差异。靖新巧(2008)研究了大学生场认知风格对图形推理的影响,结果发现认知风格和题目难度对图形测验成绩的主效应显著。从兴趣区的分析结果看,在题干部分场独立型被试的注视时间和注视次数均显著多于场依存型被试,而在选项部分却显著少于场依存型被试。马勇(2006)研究了驾驶员的视觉搜索行为,结果表明:当驾驶员没有注视前方区域时,60%的注意对象是车内的后视镜、仪表盘、音响设备区域等,平均注视时长小于1.0s。驾驶员对左后视镜的注视次数高于右后视镜,且要花更多的时间注视右后视镜。
综合已有的研究,近年来国外对驾驶员视觉行为的研究领域包括年龄、驾驶经验、视觉搜索模式和策略、车辆操控、工作负荷、视觉生理缺陷与辅助驾驶系统等方面。国内的驾驶员眼动研究领域主要包括阅读、广告、学习迁移、实景图片等,对驾驶员的视觉注视研究较少,且理论多于实验。本研究拟从场认知风格出发,探讨两种认知风格在不同压力状态下进行模拟驾驶任务的视觉搜索特征的差异。
1.被试与方法
1.1被试
随机选取87名某大学学生作为预实验被试,其中男生38人,女生49人,平均年龄21-7岁,持有C驾照,会操作手动挡车辆,平均驾驶里程数50km,均为驾驶新手。所有被试视力或矫正视力正常,从未参加过类似实验。采用认知风格镶嵌图形测验(EFT)评定被试的认知风格倾向,选取全体成绩最低的27%和最高的27%为眼动实验被试。其中,场依存型被试16名(其中男生6名),场独立型被试15名场(其中男生8名)。
1.2实验材料
1.2.1镶嵌图形测验
采用北京师范大学修订的镶嵌图形测验(EFT),包含9个简单图形和20个复杂图形,测验信度系数为0.9。得分越高,场独立性越高:得分越低,场依存性越高。
1.2.2模拟驾驶道路情境
选择一条城市道路进行编程,要求被试进行驾车右拐、过红绿灯直行、停车避让行人、调头行驶、超车等行为,驾驶时间约为10分钟。
1.3实验仪器
1.3.1 Smart Eve眼动仪
Smart Eye是瑞典的非入侵性眼动仪,包括视频成像系统和计算分析软件。视频成像系统由3个摄像头、2个红外闪光灯和1个外景摄像头组成。摄像头主要负责检测和定位虹膜及瞳孔,采集和保存眼动行为,包括所有注视、扫视和眨眼行为,并参照眼睛几何模型来确定观测者的视线。红外灯采用红外光源技术,克服了光照、眼镜等外界因素影响,适用性强,采集精度高。计算分析软件将会根据需要把驾驶环境划分成不同的兴趣区域,并能对其中的眼动行为参数进行分析。
1.3.2道路模拟驾驶器
模拟驾驶器由互动型视景系统、模拟教学专用软件、电控系统、模拟座舱、附属设备和外饰件等组成,集合了虚拟现实技术、计算机图形学、机械传动技术、三维实时渲染技术和数据通信技术,根据输入的速度、转向、刹车等信号计算出车辆的预期行为,并通过视频和音频设备反馈给驾驶者。驾驶者通过模拟器的操作部件与虚拟的环境进行交互。
1.3.3多导生理记录仪
多通道无线蓝牙生理记录仪包括硬件和软件,其硬件系统由主机、无线蓝牙、记忆卡和各种类型的传感器组成,软件系统的主要功能是与主机通讯、接收数据、采集数据和数据的分析处理。
1.4实验设计和程序
本研究采用2(认知风格:场独立型、场依存型)*2(压力状态:有压力、无压力)的混合实验设计,认知风格为被试问变量,压力状态为被试内变量。因变量包括眼动指标、驾驶行为指标,以及用以辅助说明压力等级的生理指标。安排31名被试分别参加实验。实验前进行模拟驾驶器的练习,直至被试报告能熟练驾驶;主试告知实验要求,实验时间每人约40分钟;实验结束后被试获取小额报酬。
1.4数据处理
利用Smart Eye眼动仪和模拟驾驶器采集相关数据指标,并用spss20.0进行数据管理与分析。
2.结果
2.1总注视时间
总注视时间是被试对道路场景中兴趣区内的关注时间。从实验结果(表1)来看,场独立型被试不论在有压力还是无压力情况下,其总注视时间都比场依存被试长。而在有压力情境下,所有被试的注视时间均短于无压力情境。将认知风格、压力状态作自变量,总注视时间作因变量,进行2*2的方差分析,认知风(F=2.81,p=0.098,n=0.15)和压力状态(F=0.74,p=0.394,n2=0.001)主效应均不显著,两者不存在交互作用(F=0.36,p=0.553,n=0.001)。
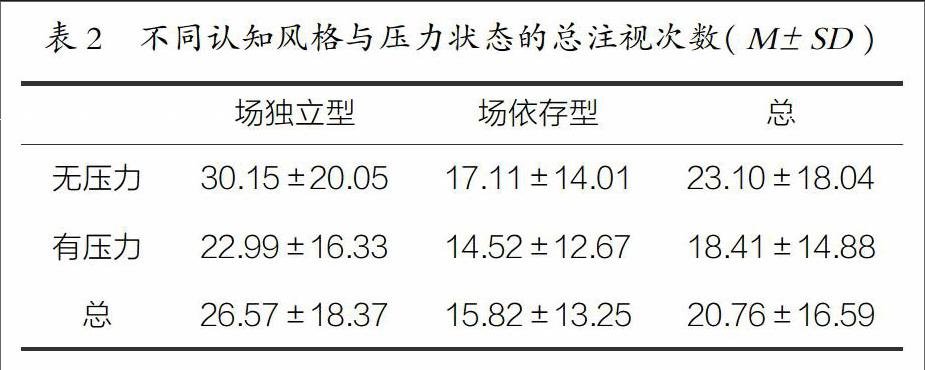
2.2总注视次数
总注视次数是被试对兴趣区内的关注次数。从表2来看,场独立型被试不论是在有压力还是无压力情况下,其总注视次数都比场依存被试长。而在有压力情境下,所有被试的注视次数均比无压力时短。经方差分析,认知风格主效应显著(F=8.50,p=0.005,n2=0.13),压力状态主效应不显著(F=1.75,p=0.190,n2=0.003),两者不存在交互作用(F=0.39,p=0.537,n2=0.015)。
2.3横向偏差
横向偏差指车辆偏离车道正中心的距离的绝对值。从实验结果(表3)来看,场独立型被试不论是在有压力还是无压力情况下,其横向偏差绝对值都比场依存被试小。而相比于无压力情境,场独立被试在有压力情境下横向偏差变小,场依存被试几乎无差异。经方差分析,认知风格主效应显著(F=8.52,p=0.005,n2=0.11),压力状态主效应不显著(F=0.03,p=0.861,n2=0.004),两者不存在交互作用(F=0.002,p=0.963,n2=0.001)。
2.4实时速度
实时速度是指从一个案例开始到结束整个过程的平均速度(案例:前车刹车灯亮或突发事件出现为一个案例的结束)。从实验结果(表4)来看,场独立型被试在无压力情境下的速度比场依存型型被试大,而在有压力情境下二者几乎一样。相比于无压力情境,所有被试在压力情境下速度都增大。经方差分析,压力状态主效应显著(F=4.78,p=0.033,n2=0.097),认知风格主效应不显著(F=0.50,p=0.482,n2=0.026),两者不存在交互作用(F=0.47,p=0.495,n2=0.001)。
2.5最大减速
最大减速是指一个案例中行驶的最大速度和踩下刹车踏板后的最小速度之差。从实验结果(表5)来看,场独立型被试不论是在有压力还是无压力情况下,其最大减速都比场依存被试大。相比于无压力情境,所有被试在压力情境下最大减速都增大。经方差分析,压力状态主效应显著(F=6.43,p=0.014,n2=0.12),认知风格主效应不显著(F=0.80,p=0.375,n2=0.031),两者不存在交互作用(F=0.53,p=0.470,n2=0.001)。
3.讨论
3.1不同认知风格对驾驶行为的影响
3.1.1不同认知风格对道路驾驶的眼动分析
从兴趣区的数据分析结果看,场依存型和场独立型被试在观察道路场景时,总注视时间差异不显著。但从均值看,无论是在有压力还是无压力的情况下,场独立型被试对道路关键信息如对面车辆、路牌、红绿灯的总注视时间都比场依存型被试长。说明场独立型驾驶员能够在有限的心理资源下,将更多的时间分配到关键的交通信息中,具有较好的信息提取和组织能力,容易发现潜在的危险从而获得对危险情境的合理解释,并提早做出有效的防御措施。本研究中,两种认知风格的被试的总注视时间存在差异,但差异并不显著。可能的原因是:第一,本研究选取的被试的量较少,虽然都是新手,但个体问存在驾驶能力的差异,会影响研究结果,在以后的研究中有必要将驾驶能力作为单独变量进行控制;第二,由于模拟驾驶器的随机性和被试驾驶习惯、行车路线的不同,导致某些突发状况和触发的实验案例存在微小差异,从而影响了被试对兴趣区的注视;第三,以往的研究材料多是文章阅读、图形推理类的,并且给予被试一定的观察任务,本研究选用的道路模拟场景与以往研究材料不同,是动态的视频呈现,兴趣区的划分也由静态转为动态,这可能在某种程度上影响总注视时间。
场依存型和场独立型被试在观察道路场景时,在兴趣区内的注视次数存在显著差异。即场独立型被试对兴趣区有更多的注视次数,场依存型被试则注视较少。Ernest等人(1996)认为,场独立型驾驶员能较好地将有限的心理资源分配到关键的交通信息中,具有成熟的元认知技能,包括较强的注意监控能力以及信息的提取和组织能力。反映在眼动指标上,即注视次数比场依存型驾驶员多。张茜(2010)研究发现,场独立者对明显危险和潜在危险的感受水平均高于场依存者,在驾驶新手中也如此。曹晓华、曹立人和马恭湘等(2005)通过眼动仪研究了场认知风格对不规则几何图形识别绩效的影响,结果发现场独立型被试的识别速度与场依存型被试存在显著差异。在时间分配方面,场独立型被试更多地对实际信息进行取样,场依存型被试则更多地使用游离性辅助搜索策略。依据信息加工速度的元认知观点,在图形辨认任务中,在完成选择有效策略、合理分配能量、监控任务操作等一系列加工过程中,场独立型被试明显优于场依存型。本研究与前人结果一致,场独立型驾驶员依据自身的内部感知来选择自己所需要的信息,注视范围较广,观察的点比较多,每个兴趣区基本都有注视到。场依存型的驾驶员在行驶过程中对正前方的区域内关注较多,容易持久地注视某一个物体,而较难关注到其他区域内可能会出现的车辆或行人等,不能很好地发现潜在的危险。
3.1.2不同认知风格对道路驾驶的行为分析
从均值看,场独立型被试不论是在有压力还是无压力的情境下,其横向偏差绝对值都比场依存型被试小。从兴趣区的分析结果看,场认知风格的主效应显著,即场独立者与场依存者的横向偏差存在显著差异。这说明了场独立型被试在整个驾驶过程中,习惯以自我为参照标准来操作车辆,而场依存型被试则更多依赖道路场景。在实时速度和最大减速上,不论是均值比较还是差异检验,认知风格的主效应均不显著。实验观察也看到,场独立型驾驶员和场依存型驾驶员在驾驶时的速度、面对紧急情况时的刹车更多受到驾驶经验、压力等的影响,与认知风格关系较弱。
3.2不同压力情境对驾驶行为的影响
本研究中关于压力情境的界定包含两个方面,一是自评,二是生理指标。其中自评等级由轻到重依次分为1、2、3、4、5。实验前主试告知被试完整驾驶一条道路的平均时间为10分钟,让被试依据自身的情况自主报告当压力等级为3时,完成全程驾驶所需的时间。而生理指标主要指心率,由多导生理记录仪搜集。经分析,被试在有压力和无压力情境下,心率的差异达到显著水平。在压力情境中,为在规定时间内行驶完全程,被试的实时速度要显著快于无压力情境,发生了更多的刹车、碰撞等行为,更易导致交通事故。
4.结论
(1)场独立者在驾驶任务中能更多关注到关键信息,在兴趣区内的总注视时间更长,总注视次数更多。
(2)在压力情境下,所有被试的速度加快,减速增大。