
基于子模型法的船用收放架抗冲击数值研究
2015-12-25 08:30金昊闫明沈阳工业大学机械工程学院沈阳110870
机械工程师 2015年2期
金昊, 闫明(沈阳工业大学 机械工程学院,沈阳110870)
0 引 言
收放架是水面舰船水下拖曳系统的重要组成部分,其与绞车共同构成了水下拖曳系统中必不可少的收放装置,而水下拖曳系统是海洋学研究、海底资源开发、海洋打捞救助以及水下探测等领域的一种重要工具。在海洋学研究中,应用拖曳式CTD剖面仪可以在航行状态下对海水特性随深度的变化进行测量[1-3];在海洋打捞救助领域,借助各种仪器设备,水下拖曳系统可以将沉入水中的各种物体打捞出水[4-5];各种拖曳式声纳系统、水声对抗系统和扫雷系统都通过水下拖曳系统进行水下探测[6-7],一旦拖曳系统在作战中受到爆炸冲击而损坏,多种水下探测系统将无法正常工作,直接危及舰船的战斗力和生命力。
舰船在海战中不可避免地受到鱼雷、水雷、深水炸弹等水中兵器的攻击威胁,这种非接触爆炸虽然不会造成强烈的局部破坏,但其冲击波影响范围很广。在爆炸冲击环境下,船体本身即便保持水密性,但是巨大的冲击波会对舰载设备造成严重的损伤,如果收放架损坏,整个拖曳系统将无法正常工作。抗冲击能力是收放架的重要技术指标之一,我国国军标中规定收放架在装备舰船之前必须通过爆炸冲击试验考核。由于收放架的质量大,爆炸冲击考核只能在浮动平台上进行,该试验成本高、操作难度大且具有一定的危险性,不宜反复试验,因此采用有限元方法计算收放架的冲击响应并校核其抗冲击能力。
舰船设备抗冲击设计方法主要有静态等效法、动态设计分析法和时域模拟法。静态等效法是将动载荷等效为一定数量的静载荷,该方法简单、易用但精度低[8];动态设计分析法是建立在模态分析理论的基础上,根据动力学原理计算系统响应,该方法不能考虑非线性因素[9];时域模拟法采用实测的时历曲线作为设备的输入曲线,对设备在时域上进行瞬态分析,该方法同时考虑其它各种非线性因素,只是计算量很大,对计算机硬件要求较高。收放架通过螺栓刚性安装于水面舰船的甲板上,其结构复杂,含有大量的联接关系,若单元尺寸较大,则计算精度低;反之则会增加大量机时,而计算精度却不会有很明显的提高。本文用时域模拟法计算其冲击响应,并采用子模型技术对局部结构做进一步分析。
1 收放架有限元模型及冲击环境
1.1 收放架结构及有限元模型
收放架整体有限元模型如图1所示,该模型包含207839个单元和303932个节点。其结构主要包括底座导轨、推进系统、齿轮传动系统和液压伸缩系统。收放架通过推进系统的移动和液压缸的伸缩来改变工作状态,完成拖缆和拖体释放、收回以及拖曳作业。
1.2 收放架的冲击环境
实船水下爆炸试验得到的舰艇设备在水下爆炸冲击环境中的时域曲线极其复杂,无法直接应用于设备的冲击试验或者数值仿真中,因此,将实测的时域曲线转换为冲击响应谱,再转换成可以直接应用的时域曲线作为输入载荷。根据我国国军标规定,以半正弦变化历程作为输入载荷,为了考察自由振动对冲击响应的影响,在冲击载荷结束后继续计算至0.05 s,收放架冲击载荷时历曲线如图2所示。
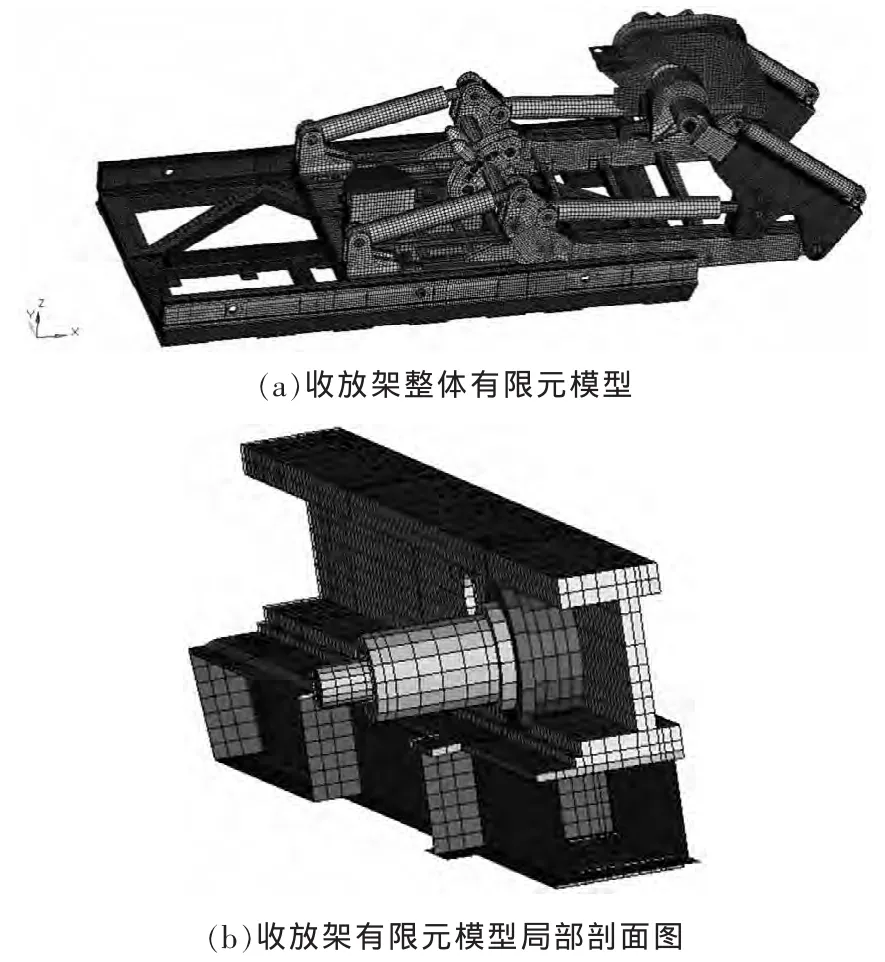
图1 收放架有限元模型
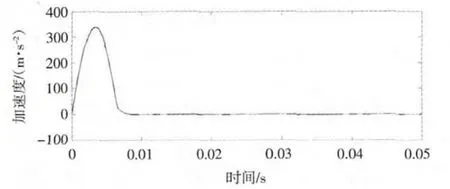
图2 收放架冲击载荷时历曲线
2 收放架的子模型
子模型法是在整体模型计算的基础上,对局部区域细化网格并重新计算的一种方法,该方法可以用较短的时间精确计算局部应力分布情况,其关键在于子模型在总体坐标系中的位置与整体模型相同区域须完全一致且应准确施加切割边界条件。
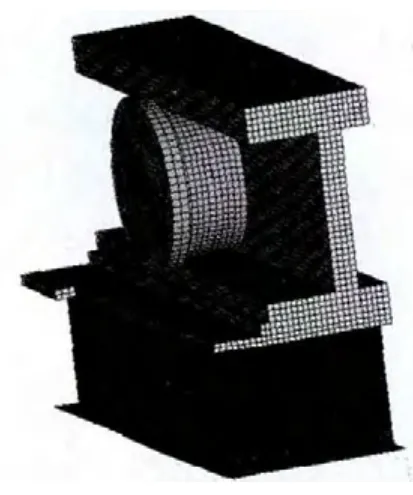
图3 收放架局部子模型
收放架内部结构和联接关系复杂,若单元尺寸较小,整体模型的计算量大,耗费机时;若单元尺寸较大,计算精度低,应力变化剧烈,因此采用子模型技术计算收放架的冲击响应,收放架局部子模型如图3所示,该模型包含53289个单元和62869个加点,其在总体坐标系中的位置与整体模型完全一致。
3 冲击载荷下收放架的应力分布
按照前文所述的冲击环境计算收放架的冲击响应,为了考察图1(b)中所示滚轮与导轨接触面间在垂向的应力分布并验证子模型法的有效性,只计算收放架在垂向的应力分布,计算结果如下:图4所示为收放架整体模型在垂向冲击下的应力分布,从图中可以看出在滚轮与导轨接触区域应力较大。
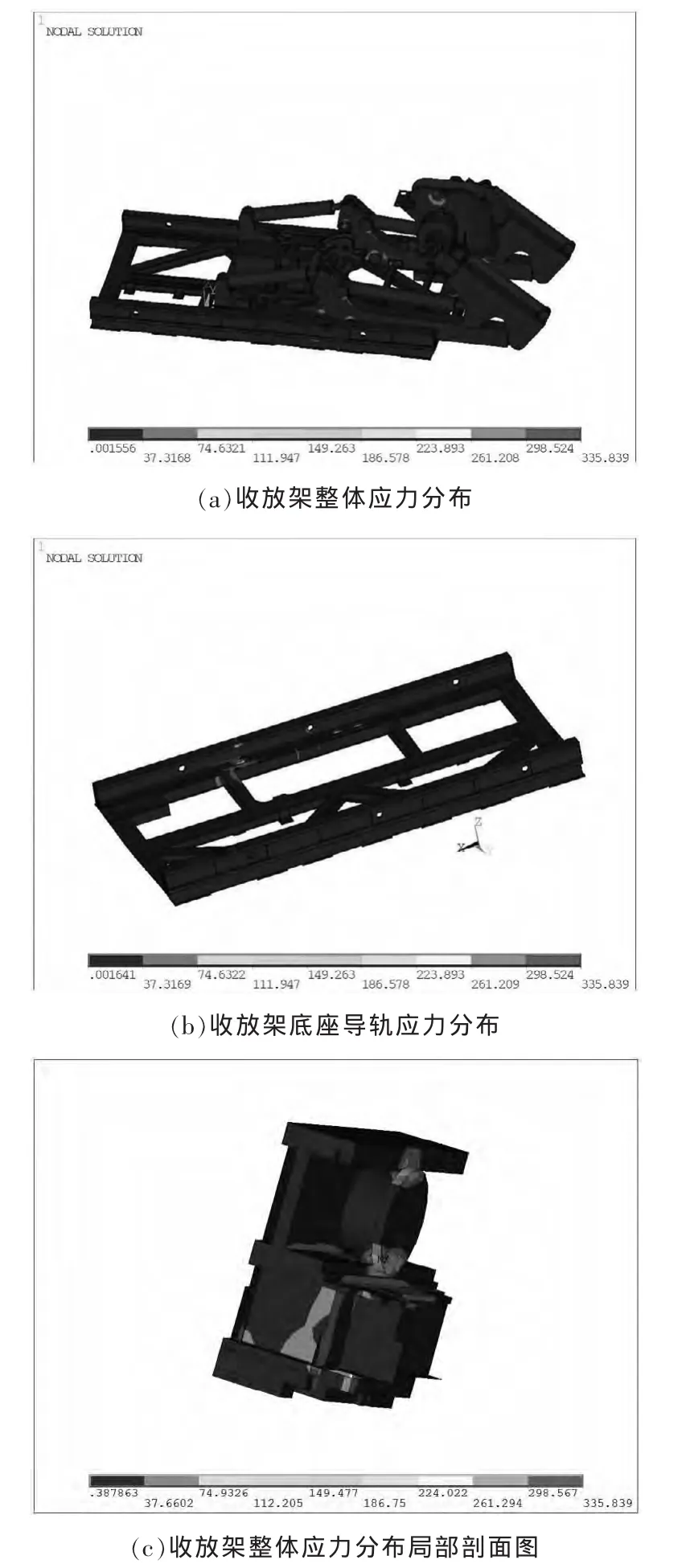
图4 收放架整体应力分布
图5所示为整体模型与子模型在滚轮与导轨接触区域内同一点的应力-时间曲线,从图中可以看出两条曲线较为接近,说明切割边界选取恰当,且网格细化提高了计算的精度,使应力分布连续。
4 结 论
通过计算收放架整体模型在垂向冲击下的应力分布并用子模型法对滚轮与导轨接触区域的应力进行计算,可以得出以下结论:
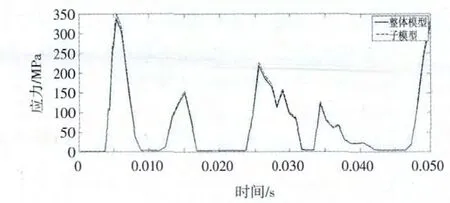
图5 滚轮与导轨接触区域内一点的应力-时间曲线
1)收放架在受到垂向冲击时,滚轮与导轨接触处的应力较大,最大值约为349 MPa;
2)子模型法与整体模型的应力分布较为接近,说明子模型的切割边界选取恰当;
3)在相同网格尺寸下,与网格细化的整体模型相比,子模型法可以节省大约80%的机时,且对计算机的硬件要求相对较低。
4)子模型法可以广泛应用于其它设备的抗冲击计算。
[1] Pfeiffer T F.Towed,undulating CTD [ C]//Proceedings of1996 MTS/IEEE Oceans Conference,1996:137-140.
[2] 张兆英,王抗美.拖曳式CTD测量技术研究[J].海洋技术,2004,23(4):18-21.
[3] 任炜,李晖,李永奇,等.UCTD系统及其关键技术介绍[J].海洋技术,2008,27(l):8-10,18.
[4] Laura P,Goeller J.On the dynamic behavior of a cable system in a recovery operation [J].Journal of the Acoustical Society of America,1971,49(3):615-621.
[5] 黄锡昌,虞聪达,苗振清.中国远洋捕捞手册[M].上海:上海科学技术文献出版社,2003:374-400.
[6] 刘孟庵.拖曳线列阵声呐技术发展综述[J].声学与电子工程,2006(3):1-5.
[7] Richard S.UK accepts Sonar2087 into service five months early[J].Jane's Navy International,2006(3):27-28.
[8] 耿盼盼.舰用燃气轮机抗冲击数值模拟研究[D].上海:上海交通大学,2012.
[9] 冯麟涵.舰用增压锅炉抗冲击特性研究[D].哈尔滨:哈尔滨工程大学,2008.
猜你喜欢
中学生数理化(高中版.高考理化)(2022年3期)2022-04-26
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
中国特种设备安全(2019年7期)2019-09-10
冰雪运动(2019年2期)2019-09-02
新能源科技(2018年10期)2018-02-15
阅读(中年级)(2016年11期)2017-01-23
现代制造技术与装备(2015年4期)2015-12-23
中国塑料(2015年6期)2015-11-13
橡胶工业(2015年1期)2015-07-29
制造技术与机床(2015年10期)2015-04-09
