执行器故障对磁力轴承性能影响的研究
2015-12-24 06:04胡春桃
机电信息 2015年18期
关键词:动态特性
执行器故障对磁力轴承性能影响的研究
胡春桃
(武汉理工大学机电工程学院,湖北 武汉 430070)
摘要:针对具有冗余结构的径向磁力轴承,运用Matlab对执行器故障导致不同磁极失效情况下转子的动态特性进行了仿真分析。在不改变磁力轴承机械结构的前提下,根据磁力轴承系统的实际工作情况和稳定性要求采取了增加线圈电流的措施,改善了磁力轴承的动态特性。研究结果为实施提高磁力轴承可靠性的补偿策略提供了依据。
关键词:磁力轴承;执行器故障;动态特性
收稿日期:2015-03-09
作者简介:胡春桃(1990—),女,湖北枝江人,硕士研究生,研究方向:磁悬浮理论与应用。
0引言
磁力轴承作为高速精密转子的理想支承[1],航空发动机[2]、潜艇风机、高性能数控机床[3]等高科技装备对其性能和可靠性也提出了更高的要求。磁力轴承的执行器由功率放大器和电磁铁构成,是电控系统的重要组成部分。针对执行器故障,Maslen等在偏置电流线性化理论的基础上提出了基于电流分配矩阵重构的径向磁力轴承执行器容错控制算法[4],为磁力轴承系统执行器故障研究提供了理论基础。
现有的研究集中在磁力轴承的冗余控制策略和磁力轴承能够承受的极限失效磁极数等方面[5-6],对失效磁极所处位置对磁力轴承动态特性影响的研究甚少。本文以冗余结构的径向磁力轴承为对象,研究不同磁极失效对磁力轴承动态特性的影响。
1径向磁力轴承冗余结构
图1为12极冗余结构的径向磁力轴承[7],每个磁极上缠绕匝数相同的线圈,并且每组线圈采用独立控制。每个磁极对应的功率放大器或线圈故障都会导致该磁极失效,从而对磁力轴承转子的动态性能产生一定的影响。

图1 12极冗余径向磁力轴承
2执行器故障分析
2.1执行器故障的不同形式
在Matlab/Simulation中,对图1所示的冗余磁力轴承进行执行器失效的仿真分析。本研究采用PID控制,总的仿真时间设为t=0.12 s,在t=0.04 s时单个磁极失效,即对应的功率放大器输出变为0,在t=0.08 s时一个磁极对磁极失效,即失效磁极对所对应的2个功率放大器输出都变为0。不同磁极失效时转子位移曲线如图2、3所示,以转子y轴最下端紧贴定子和x轴最左端紧贴定子分别计为两个方向位移起点,转子在平衡位置时气隙为0.3 mm。
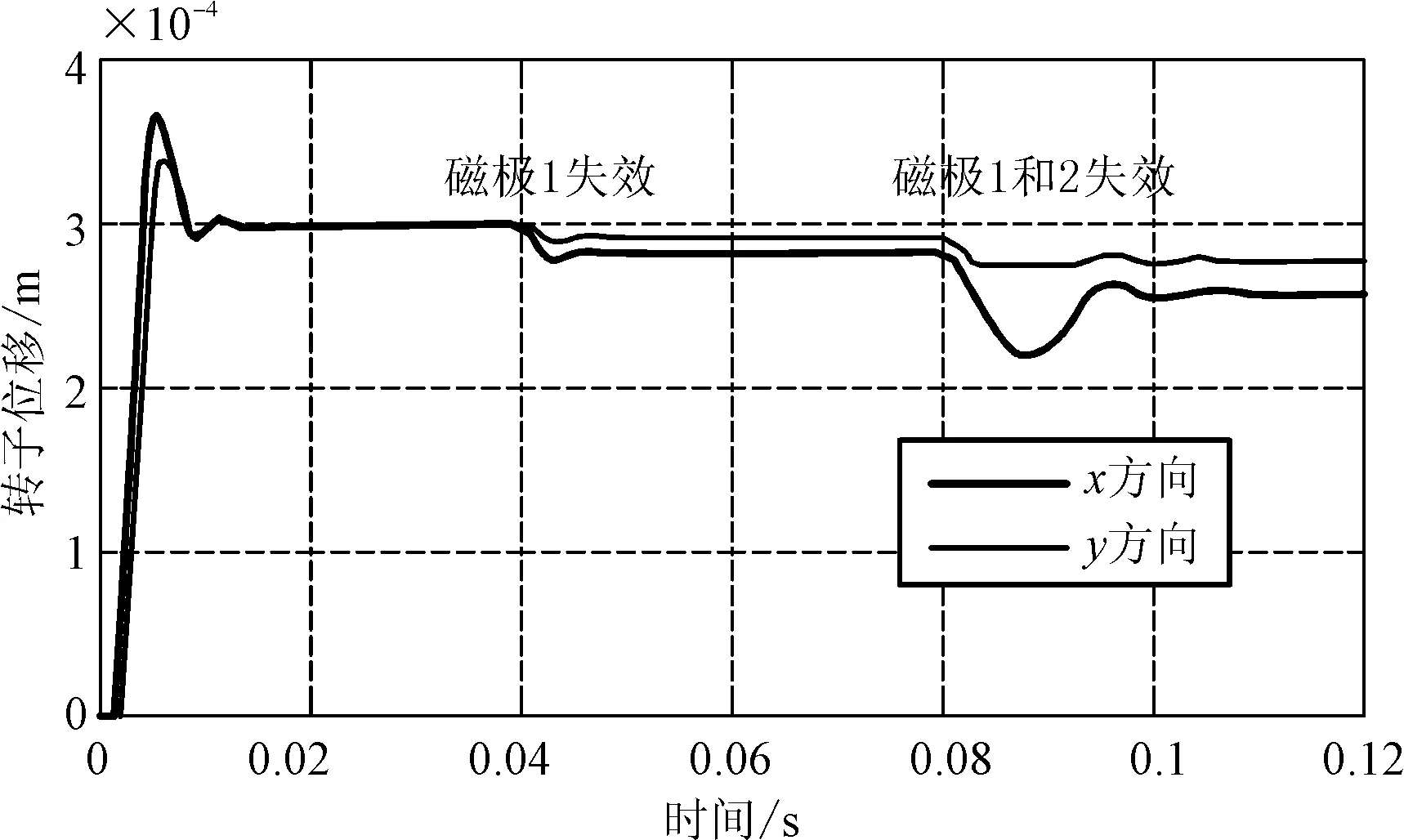
图2 磁极1、磁极1和2失效转子位移

图3 磁极3、磁极3和4失效转子位移
对比分析图2和图3中的转子位移曲线,可知执行器故障会导致转子偏离设定的平衡位置;不同磁极或磁极对失效对转子的动态特性影响不同,并且失效的磁极(磁极1)或磁极对(磁极1和2)越靠近x轴对x方向的位移影响越大,而对y方向的位移影响较小;失效的磁极(磁极3)或磁极对(磁极3和4)越靠近y轴对y方向的位移影响越大,因为磁极3和4对称分布在y轴两侧,所以对x方向的位移几乎没有影响。
2.2执行器故障的补偿措施
执行器故障表现为对应线圈电流变小或没有,从而使磁力轴承电磁力不足,根据电磁力与电流的平方成正比这一理论,可以考虑增加未失效线圈的电流来保证磁力轴承提供足够的电磁力以支撑转子,如在前述磁极1失效后增加磁极2上线圈电流来增加电磁力,从而控制转子的平衡位置,转子位移如图4所示。
3结语
根据主动磁力轴承的工作原理,具有冗余结构的径向磁力轴承执行器故障会导致对应的磁极失效,使转子出现一定的振动,并经过一定时间达到新的平衡状态。在执行器发生故障后,及时补偿特定未失效线圈的电流可以使

图4 磁极1失效补偿后转子位移
系统较快地实现重构,并改善重构过程中转子的动态特性。
研究表明,磁力轴承执行器故障,失效磁极或磁极对所处位置不同对转子的影响也会有所不同,失效磁极越靠近某坐标轴,对该坐标方向的转子位移影响越明显。这一影响可以通过增加特定线圈电流的方式来减弱甚至抵消,从而提高径向磁力轴承系统工作的可靠性。
[参考文献]
[1]武汉理工大学机电工程学院.磁悬浮轴承应用前景广泛[J].国际学术动态,2011(1):32-34.
[2]Meeks C,McMullen P.Lightweight Magnetic Bearing System for Aircraft Gas Turbine Engines[C]//Proceedings of the 4th International Symposium on Magnetic Bearings. switzerland,1994:429-434.
[3]Lzpizua A,Almandoz X,Martin M S.Design and Manufacturing of a 70 kW,36 000 rpm Milling Spindle[C]//Proceedings of the 11th International Symposium on Magnetic Bearings.Japan,2008:546-550.
[4]Maslen E H,Meeker D C.Fault Tolerance of Magnetic Bearings by Generalized Bias Current Linearization[J].IEEE Transactions on Magnetics,1995,31(3):2304-2314.
[5]Agarwal P K,Chand S.Fault-tolerant Control of Three-pole Active Magnetic Bearing[J].Expert Systems with Applications,2009(36):12592-12604.
[6]崔东辉,徐龙祥.基于坐标变换的径向主动磁轴承容错控制[J].控制与决策,2010,25(9):1420-1425,1430.
[7]王晓光,魏太琛.弱耦合径向磁力轴承的研究[J].武汉理工大学学报:信息与管理工程版,2010,32(1):39-43.
猜你喜欢
计算技术与自动化(2017年1期)2017-05-08
山东工业技术(2017年8期)2017-05-08
科技创新导报(2016年28期)2017-03-14
科技与创新(2017年1期)2017-02-16
成长·读写月刊(2016年12期)2017-01-12
科技与创新(2016年18期)2016-11-04
科技视界(2016年24期)2016-10-11
科技经济市场(2016年1期)2016-02-02
科技与创新(2015年24期)2015-12-21
能源研究与信息(2015年3期)2015-11-18