某高超声速风洞五自由度机构控制系统研制
2015-12-23 05:21杨海滨,张伟,夏洪亚
兵器装备工程学报 2015年1期
【信息科学与控制工程】
某高超声速风洞五自由度机构控制系统研制
杨海滨,张伟,夏洪亚
(中国空气动力研究与发展中心,四川 绵阳621000)
摘要:为了克服某高超声速风洞五自由度机构控制系统功能单一、精度低、运行可靠性差等缺点,对其控制系统进行了重新研制。新的控制系统采用模块化设计,以DMC-2180独立型多轴运动控制器为核心,通过PDC系列直流伺服单元,连接5台直流伺服电机,并通过绝对编码器反馈机构位置,从而构成高精度的闭环直流伺服控制系统。控制软件采用运动控制器自带的GALIL两字符命令集同时结合VB/VC++语言等编程方式,实现了多种运动控制功能。经过调试并结合几年来的运行实际情况表明,该控制系统精度高、运行稳定可靠、设计先进、功能齐全。
关键词:五自由度;控制;硬件;软件
收稿日期:2014-08-05
作者简介:杨海滨(1972—),男,高级工程师,主要从事风洞自动控制方面的研究。
doi:10.11809/scbgxb2015.01.029
中图分类号:TP274
文章编号:1006-0707(2015)01-0102-04
本文引用格式:杨海滨,张伟,夏洪亚.某高超声速风洞五自由度机构控制系统研制[J].四川兵工学报,2015(1):102-105.
Citationformat:YANGHai-bin,ZHANGWei,XIAHong-ya.DevelopmentofFive-DegreesofFreedomMechanismControlSysteminHypersonicWindTunnel[J].JournalofSichuanOrdnance,2015(1):102-105.
DevelopmentofFive-DegreesofFreedomMechanismControl
SysteminHypersonicWindTunnel
YANGHai-bin,ZHANGWei,XIAHong-ya
(ChinaAerodynamicsResearchandDevelopmentCenter,Mianyang621000,China)
Abstract:In order to overcome the defect of control system of five-degrees of freedom mechanism in the hypersonic wind tunnel such as single function, low precision and reliability, a new control system was developed. The DC servo control system was composed of DMC-2180 unaided multi-axis locomotion controller, 5 PDC DC servo cells, DC motors and absolute encoders. Computer control software adopted GALIL two-characters command and VB/VC++. It has proved that the control system has many characters such as high control precision and stabilization, advanced design method and perfect function. We mainly introduced technique target, design scheme,hardware structure, software development and application effect of it.
Keywords:five-degreesoffreedom;control;hardware;software
风洞的模型支撑机构运动自由度共有6个:即风洞轴线方向位移x、垂直方向上下位移y、垂直方向横向位移z、攻角α(沿z轴旋转)、侧滑角β(沿y轴旋转)、滚转角γ(沿x轴旋转),其坐标定义见图1。
大多数风洞的模型支撑机构运动自由度只有2~3个,某高超声速风洞由于试验流场温度较高,为了最大程度地降低模型、天平的温度效应,同时为了试验时模型各种姿态的调整,该风洞模型支撑机构采用具有五自由度(即X、Y、α、β、γ)的上下投放式机构。试验时流场建立之前,由于试验段受高温气流的冲击,模型连同其支撑机构位于试验段流场下面,中间用隔热板隔开,以防止模型、天平以及机构长时间受高温气流的影响而影响设备及试验数据。当流场建立后,隔热板打开,机构连同试验模型投放(Y轴上升)到流场中,模型变换各种姿态并采集数据,试验完成后模型回收(Y轴下降),控制系统应根据试验需要完成5个自由度的复杂变化。
五自由度机构控制系统在设计中有以下几个技术难点:① 机构运动自由度个数多,自由度个数总共有5个,每个运动自由度既可单独运动又可每2个、3个、4个联动,这在国内外同类高超声速风洞中使用的模型支撑机构是不多见的。② 机构各自由度运动速度相差大,由于受高温气流的作用,要求Y轴能够快速运动。③ 机构工作空间尺寸小、载荷大、运动范围宽。通过合理地选择硬件和进行软件设计,研制了一套新的五自由度机构控制系统,达到了设计指标和使用要求。
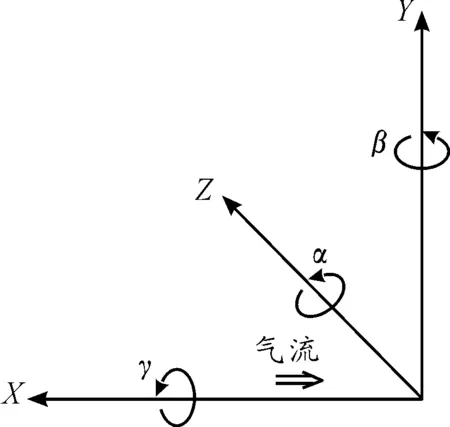
图1 模型支撑机构坐标系
1设计技术指标
1) 各自由度运动技术指标:
运动范围:α=-5°~50°
β=-12°~12°
γ=-180°~180°
x =-300~300mm
y =-800~100mm
运动精度:Δα=Δβ=±1′
Δγ=±3′
Δx =Δy =±0.15mm
运动速度:
快速回零Vxmax=100mm/s
ωαmax=ωβmax=ωγmax=15 °/s
慢速运动Vxmin=Vymin=5mm/s
ωα=ωβ=ωγ≤3 °/s
阶梯运动ωα=ωβ=ωγ≤5 °/s
2) Y轴最大运动速度Vymax由原来的100mm/s提高至250mm/s。
3) 控制系统为开放式系统,能实现四轴联动的功能。
2系统总体方案设计
根据多自由度运动控制的相关理论[1],五自由度机构控制系统分为上位机和下位机。下位机选用DMC-2180独立型多轴运动控制器为核心单元,通过互联模块PICM2900,连接5台PDC系列直流伺服单元[2],驱动Y、X、α、β、γ的直流伺服电机,通过电机的绝对式脉冲编码器构成系统的闭环位置伺服,从而完成对机构升降、沿风洞轴线移动以及模型姿态角的位置控制。控制系统结构框图如图2所示。
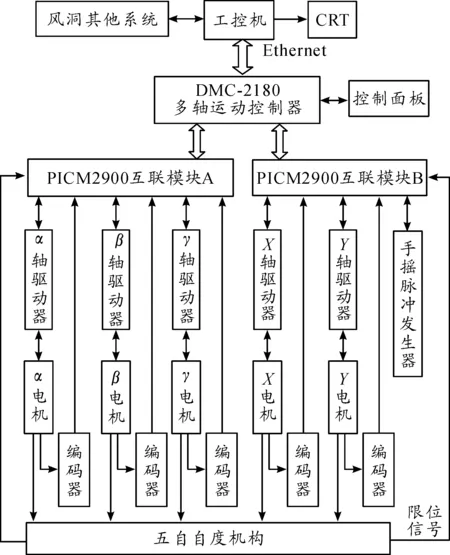
图2 五自由度机构控制系统结构
上位机和运动控制器通过以太网通讯,运动控制器上专用CPU与上位机CPU构成主从式双CPU控制模式,运动控制器上专用CPU用来处理所有运动控制的细节,不占用上位机资源。运行在上位机上的系统管理软件主要完成人机界面,程序编制,实时监控,系统运行管理以及与检测系统的通讯等任务。手摇脉冲发生器用于试验前在现场手动调整模型的位置和姿态,以确定试验时模型的运动范围。
运动控制器采用双环伺服控制,以实现对机构运行速度、线位移和角位移的精确控制。图3给出了一个轴的伺服控制原理示意图,其余各个轴的控制原理均与其相同。内环为速度环,外环为位置环[3]。内环为模拟闭环调节,外环为数字闭环调节。在直流伺服电机末端轴上安装高精度的脉冲编码器(2000PPR)作为检测元件,在速度环控制中,返回的脉冲信号经F/V变换,作为反馈信号进入速度伺服单元,通过设定速度伺服单元的有关参数,可调节直流伺服电机的驱动电压,从而调节电机的运行速度;在位置环控制中,返回的脉冲信号通过计数和比例变换,与预置的位置值进行比较运算,再经D/A变换输入到速度伺服单元,控制电机运行,使机构精确定位于预置位置[4-5]。
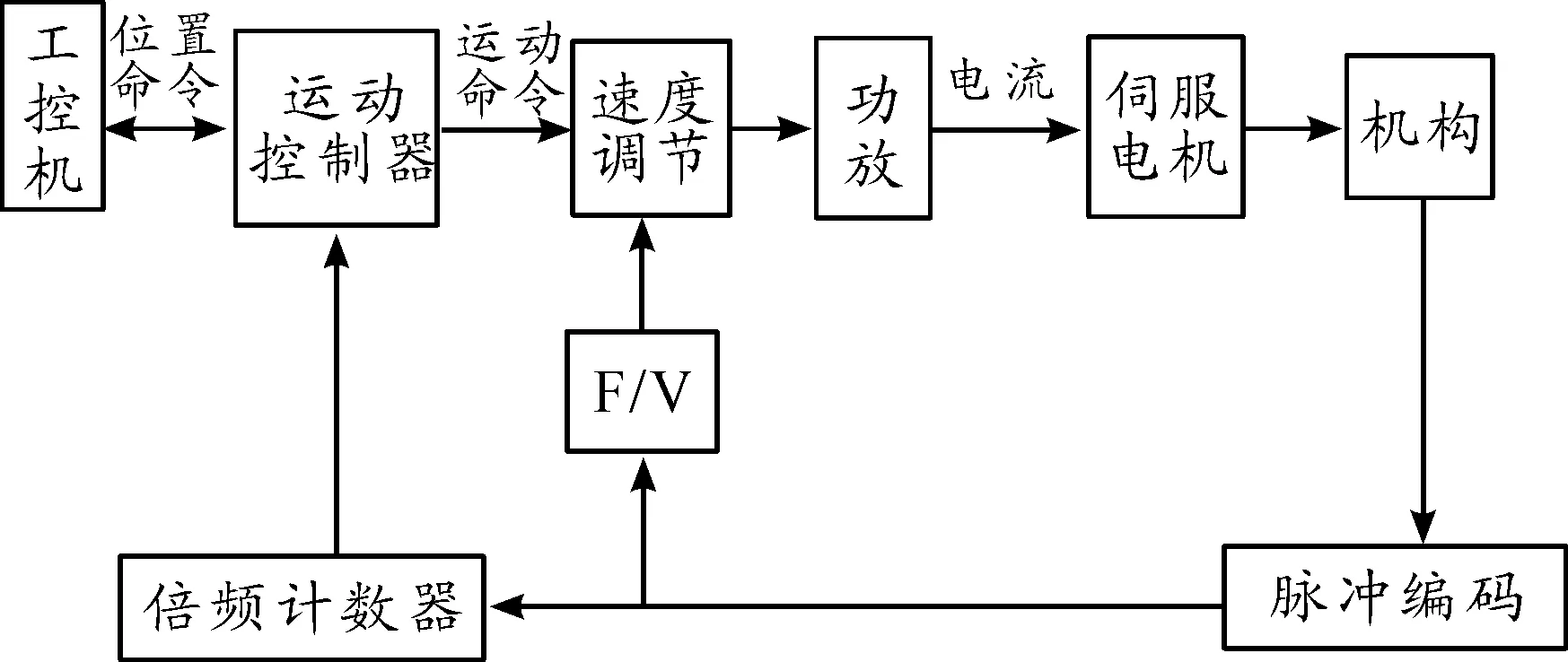
图3 伺服控制原理
3系统硬件及软件设计
3.1控制系统硬件设计
1) 运动控制器:本控制系统采用具有远程网络控制功能的DMC-2180独立型8轴运动控制器,能够编程的运动方式有JOG、PTP定位、直线、圆弧插补、多轴联动控制等[6]。
2) 伺服驱动单元:PDC系列直流伺服系统采用智能型功率模块(IPM)、混合集成电路,实现PWM控制。该系统具有频带宽、响应速度快、调速范围宽、变流效率高、无噪音等特点[7],并提供了完善的故障报警提示功能。
3) 直流伺服电机:由于直流伺服电机具有大扭矩、宽调速、大惯量、低速特性较好的特点,因此可直接与滚珠丝杠联接,减少误差环节;同时,由于其本身的惯量大,受机械传动影响小,配上先进的控制系统组成闭环伺服系统,可以得到较高的精度。
根据数控机床伺服进给系统有关理论,直流伺服电机的选择应满足下列关系:
Jr=Jm+Jt<3Jm
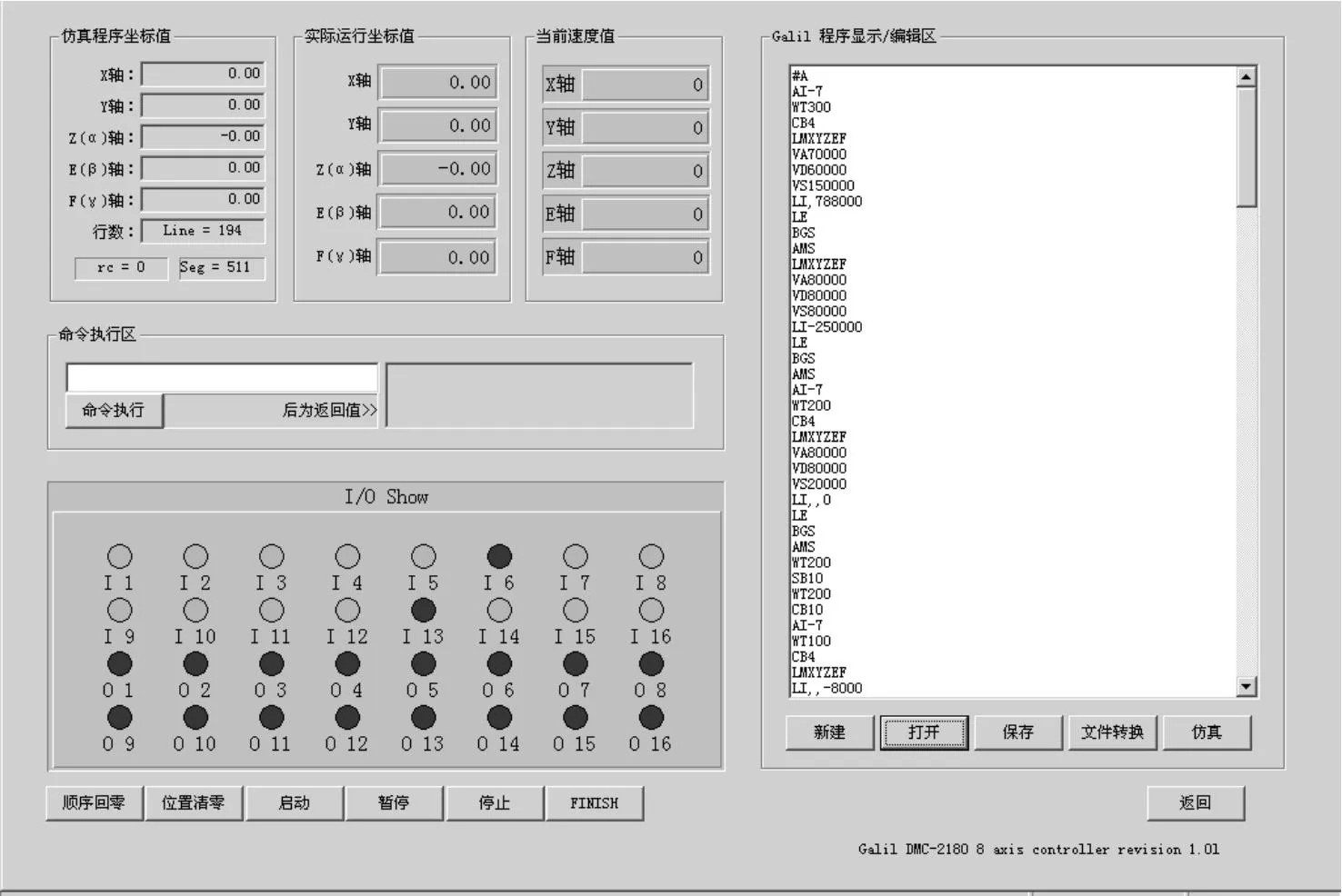
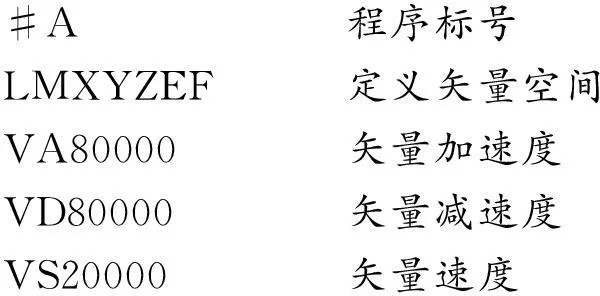
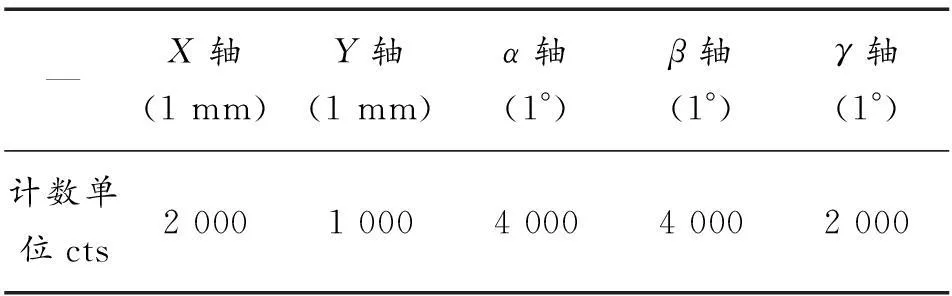
Ma=Mamax+Mf+M0 Mt 式中:Jm为电机转动惯量(kg·m2);Jt为负载惯量(kg·m2);Jr为电机转动惯量与负载惯量之和(kg·m2);Ma为快速启动时的力矩总和(N·m);Mamax为快速启动时的最大加速力矩(N·m);Mf为快速启动时的摩擦力矩(N·m);Mmax为直流伺服电机的最大转矩(N·m);Mt为直流伺服电机工作力矩(N·m);M0为直流伺服电机的额定转矩(N·m)。 以Y轴电机的选择为例,当Y轴以250 mm/s的速度运行时,有 Jt=0.629 kg·m2Mt=14.3 N·m 五自由度机构选用了性能优良的FANUC直流伺服电机作为整个控制中的执行元件。FANUC直流伺服电机是为晶体管驱动用电动机专门设计的,有着很高的加速能力和快速响应性能,可不受负荷的影响,发挥稳定的动态性能。 3.2控制系统软件设计 3.2.1控制软件功能 根据机构的使用特点和风洞的实际情况,五自由度机构控制软件具有如下功能:系统自检、机构运行选择、参数设置、运行路径规划、实时处理、安全保护、在线帮助。 1) 机构运行选择包括:手动、自动、手轮、仿真、急停、回零等。 2) 参数设置包括:试验运行参数、系统工作参数。 3) 运行路径规划:采用参数化编程方式,完成试验中模型运行轨迹的规划,并生成路径数据文件。 4) 实时监测处理包括:实时运动状态显示、实时监测、实时自诊断、实时报警。 5) 安全保护包括:安全口令、限位保护。 3.2.2控制程序流程 控制程序由2部分内容构成—准备程序和试验程序,包含了以下几项控制功能: 1) 自动生成风洞试验的程序,并通过Ethernet通讯口传送到DMC系统; 2) 完成机构运行误差修正处理; 3) 在试验中监控DMC系统自动运行; 4) 与数据采集系统通讯。 图4为主控程序的流程,根据该流程图可实现各种运动方式的编程。 图4 五自由度机构主控程序流程 3.2.3编程实现方式 为了实现各种运动形式和功能,五自由度控制软件中采用了3种编程方式。根据这3种编程方式各自的特点以及难易程度,不同的控制功能采用不同的编程方式来实现。 1) 基于VB及其ActiveX控件的编程。在五自由度控制软件中,手脉、点动、定义零点、回机械零点等功能采取基于VB的编程方式,优点是编程简单、方便、直观。为了二次开发方便,使用了ActiveX控件。 2) 基于VC++及其动态链接库DLLS的编程[8]。五自由度机构的运动控制界面、仿真等功能采用VC++编程,优点是性能安全稳定、可靠性高、可扩展性强。图5为五自由度机构运动控制界面。 3) 基于GALIL两字符命令集的编程。GALIL两字符命令集是专门针对DMC运动控制器而开发的ASCII两字符指令。 图5 五自由度机构运动控制界面 GALIL两字符命令可以用指令来指定运动形式,对输出编程,检查输入状态等。GALIL两字符命令集编程如下: LI-50,620,50X轴运动到前方50 mm处,Y轴运动到620 mm处,攻角α运动到50°(3轴联动) … EN程序结束 编程完成后,对原始程序进行转换,由于各个轴单位运动距离对应运动控制器一定的计数单位,因此程序要转换为按计数单位设定的各轴运动距离和运动速度才能运行。五自由度机构编程参数换算如表1所示。 表1 各自由度对应计数单位换算表 4系统应用情况 新研制的五自由度机构控制系统投运后,经过了几千次型号试验运行的检验,在风洞中发挥了应有的作用,保障了型号试验的顺利进行。 如在某型号超大攻角测力试验中,模型支撑拐臂预埋角40°,模型最大攻角达到90°。首次在风洞试验中运用了4轴联动指令,保证了模型在攻角运动时始终保持在流场均匀区的范围内,成功完成了试验,拓展了该风洞的试验能力。 5结论 五自由度机构控制系统采用模块化设计,以DMC-2180独立型多轴运动控制器为核心,通过直流伺服单元连接伺服电机,从而构成高精度的闭环直流伺服控制系统。控制软件采用GALIL两字符命令集同时结合VB/VC++语言等编程方式,实现了多种运动控制功能。该系统具有以下特点: 1) 控制系统设计先进,功能齐全,操作简单,系统采用多种编程方式,极其灵活,效率高,开放性好,二次开发方便。 2)Y轴最大运行速度由100 mm/s提高到250 mm/s,上升时间由原来10 s缩短到4 s左右,不仅有利于设备的安全运行,还节约了大量能源。 3)控制系统具有运动实时监测的功能,并能在系统运行过程中进行人工干预,在特殊情况下可执行紧急回零或者顺序回零指令。 4) 在设计中很好地解决了运动精度高、各轴速度变化范围宽、载荷大、五轴四联动高精度控制等技术难点,拓展了该高超声速风洞的试验能力。 参考文献: [1]丁学恭著.机器人控制研究[M].浙江:浙江大学出版社,2006:53-55. [2]张海根.机电传动控制[M].北京:高等教育出版社,2001:159-163. [3]金以慧.过程控制[M].北京:清华大学出版社,1998:103-106. [4]张振,都基炎,叶纯.小型无人机三轴飞行仿真转台设计[J].兵工自动化,2013(11):73-76. [5]李小松,马利业.悬挂运动控制系统[J].四川兵工学报,2010(7):89-92. [6]北京中宝伦自动化技术有限公司.GALIL应用编程指南[Z].北京:北京中宝伦自动化技术有限公司,2002. [7]天津电气传动设计研究所.电气传动自动化技术手册[Z].天津:天津电气传动设计研究所,2008:479-481. [8]徐晓刚,高兆法,王秀娟.Visual C++入门与提高[M].北京:清华大学出版社,1999:102-105. (责任编辑杨继森)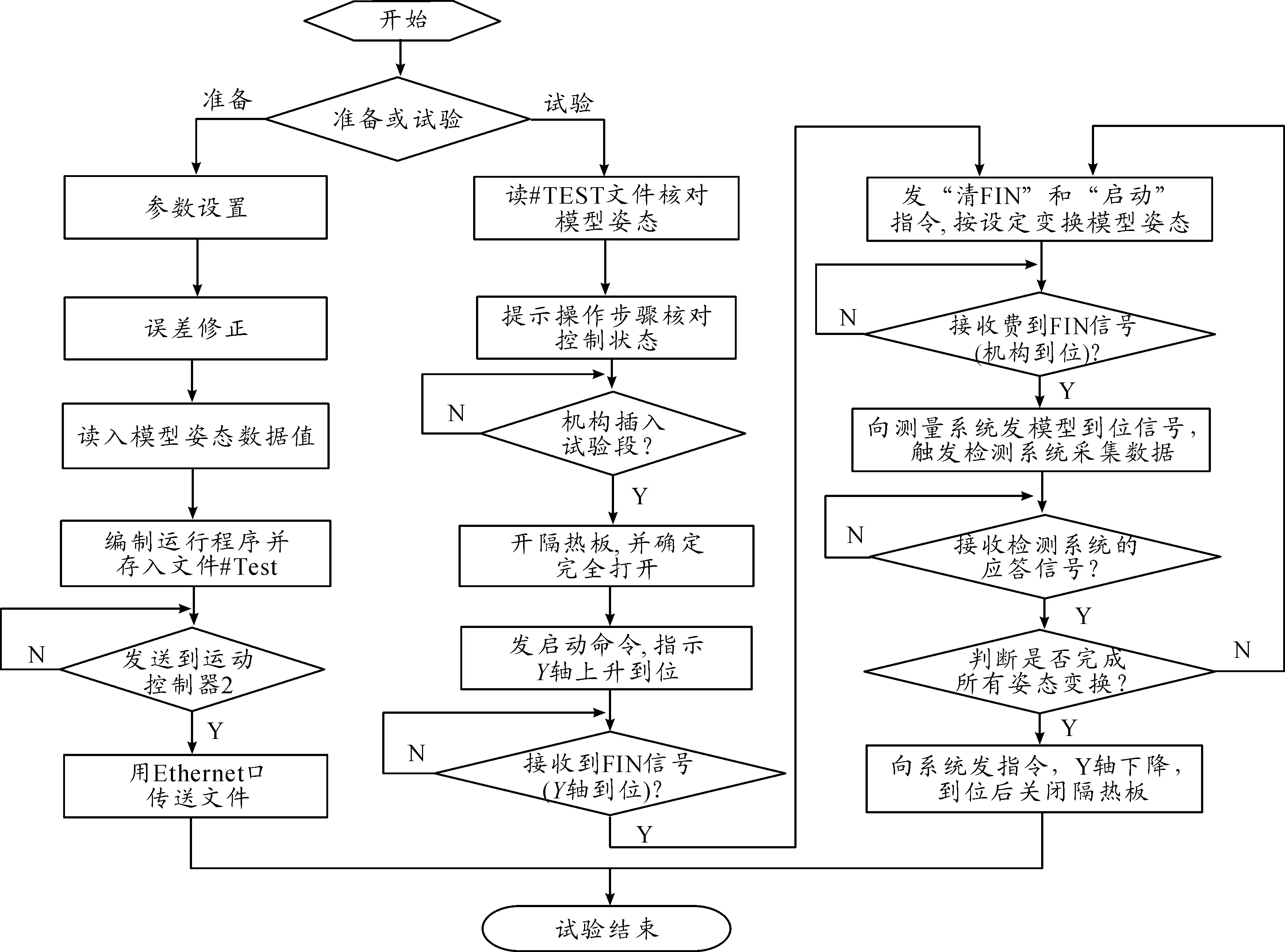
 猜你喜欢
英语文摘(2021年10期)2021-11-22摄影之友(影像视觉)(2019年3期)2019-03-30电脑知识与技术(2016年27期)2016-12-15中国新通信(2016年16期)2016-10-18科技视界(2016年21期)2016-10-17大众理财顾问(2016年9期)2016-10-11科技视界(2016年20期)2016-09-29大众理财顾问(2016年8期)2016-09-28CHIP新电脑(2015年10期)2015-10-15微型计算机(2009年23期)2009-06-01
猜你喜欢
英语文摘(2021年10期)2021-11-22摄影之友(影像视觉)(2019年3期)2019-03-30电脑知识与技术(2016年27期)2016-12-15中国新通信(2016年16期)2016-10-18科技视界(2016年21期)2016-10-17大众理财顾问(2016年9期)2016-10-11科技视界(2016年20期)2016-09-29大众理财顾问(2016年8期)2016-09-28CHIP新电脑(2015年10期)2015-10-15微型计算机(2009年23期)2009-06-01