陆军合成分队中侦察无人机的机动仿真研究
2015-12-23 07:44张伟,何天鹏
兵器装备工程学报 2015年9期
关键词:无人机
【装备理论与装备技术】
陆军合成分队中侦察无人机的机动仿真研究
张伟a,何天鹏b
(装甲兵工程学院a.科研部;b.军政部,北京100072)
摘要:对陆军合成分队作战仿真中侦察无人机的机动仿真问题展开了研究,对该仿真过程中存在的基本问题进行了逻辑分析与算法设计。分析了侦察无人机在陆军合成分队作战中的主要任务,以及机动模型与其他模型间的交互关系,对其飞行过程进行了离散化模拟,重点对转弯算法、绕行算法以及扫描侦察飞行算法进行了设计,并对算法设计进行了实验验证。验证结果表明,模拟结果符合实际情况和仿真要求,为陆军合成分队中其他飞行器的机动仿真研究提供了有益的参考。
关键词:无人机;机动模型;装备仿真
收稿日期:2015-04-20
作者简介:张伟(1971—),男,博士,副教授,硕士研究生导师,主要从事装备作战仿真研究;何天鹏(1983—),男,硕士研究生,讲师,主要从事装备作战仿真研究。
doi:10.11809/scbgxb2015.09.002
中图分类号:TP391.9;TJ8
文章编号:1006-0707(2015)09-0005-06
收稿日期:2015-04-22
基金项目:国家863计划资助项目(2009AA04Z167);辽宁省自然科学基金 (201102182)
本文引用格式:张伟,何天鹏.陆军合成分队中侦察无人机的机动仿真研究[J].四川兵工学报,2015(9):5-9.
Citationformat:ZHANGWei,HETian-peng.StudyofManeuverSimulationofReconnaissanceUAVofComposedCombatUnitofArmy[J].JournalofSichuanOrdnance,2015(9):5-9.
StudyofManeuverSimulationofReconnaissanceUAVof
ComposedCombatUnitofArmy
ZHANGWeia, HE Tian-pengb
(a.ScientificResearchDepartment;b.MilitaryandPoliticalDepartment,
AcademyofArmoredForceEngineering,Beijing100072,China)
Abstract:The intention of this paper is to make a study on the maneuver simulation of reconnaissance UAV in the combat simulation of composed combat unit of army, make logical analysis and algorithm design on the essential issue of the process of the maneuver simulation. This study analyzed the task of the reconnaissance UAV of composed combat unit of army in operations, and the interaction between maneuver model and other models, and made discrete simulation of the process of the fight. This study put an emphasis on the design of turning algorithm, detour algorithm and reconnoiter maneuver algorithm, and made an experimental verification on them at last. According to the result of the verification, the result of simulation is accordant with the practical situation and is satisfactory of the maneuver simulation. It also provides a reference for the maneuver simulation research of other aircraft of the composed combat unit of army.
Keywords:UAV;maneuvermodel;weaponrysimulation
信息化条件下武器装备需求论证、武器装备作战运用方法研究、武器装备作战运用基础数据研究与分队战术训练方法研究,需要在方法上和技术上进行新的探索和突破。建立适应性、可扩展性、真实性和实用性强的装备作战仿真模型,进行分队级作战仿真,是解决上述问题的有效手段。陆军合成分队是未来信息化条件下联合作战地面作战力量的发展趋势,其主要装备类型除主战装备外,还包括指挥通信装备、侦察情报装备及各类保障装备。立体侦察装备的应用,是未来信息化条件下作战侦察的重要手段和方式。侦察型无人机因部署灵活,侦察周期较短成为未来合成分队中的重要侦察力量。
1陆军合成分队作战仿真中的侦察无人机系统
信息化条件下的作战行动,战斗各方对信息的依赖程度极大增强。在作战行动中,双方指挥员对对方高价值单元(HVU)的攻击,及对自身高价值单元的保护,需要精确的情报信息作为辅助和支撑[1,2]。所以,包括信息在内的多维空间主动权的争夺成为作战各方关注的焦点。分队级陆军作战力量,是未来陆军的基本组成细胞,具有较为独立的作战能力、信息获取及分发处理能力和自我保障能力,能在关键的作战行动中发挥突出作用。因无人机系统减少了人在危险环境中暴露的时间,却发挥了巨大的感知战场环境与资源、辅助军事决策的作用,甚至直接参与作战行动,各国军队已将其作为陆军合成分队作战力量的重要组成部分和提高作战能力的法宝。
本研究中所讨论的无人机系统,包括编制于陆军合成分队的无人机飞行器(UAV)、操作员、飞行和导航系统、地面信息处理系统等,实际上指的是能够自主完成战术侦察任务的作战实体。按照其工作原理和主要作战功能,将其分解为4个仿真模型,即无人机指挥模型、无人机机动模型、无人机侦察模型和飞行器损伤模型。图1显示了侦察无人机的模型组成及其内外部交互关系。

图1 侦察无人机的模型组成及交互关系
无人机指挥模型应能够规划飞行器飞行路线,能够规划规避无法通行区域或高危飞行区域的绕行路线,并能够在初始化函数中向无人机机动模型进行参数装定[1,2];能够向无人机机动模型发出更新后的程控飞行路径任务序列,或模拟无人机操作员输出实时的手控指令。无人机机动模型应能够按照指挥模型规划的程控路径和飞行时间,自动采用巡航速度作为理想速度进行起飞、飞行、返回、回收(降落)等动作[3-6];能够自动规划侦察区域上空侦察扫描路线,能够优先执行无人机指挥模型实时发出的手控指令或更新之后的程控路径任务;能够体现无人机性能,实时输出六自由度姿态参数(x,y,z,α,β,γ)即三维坐标、方向角、侧倾角、俯仰角,输出相对地面的高程值;能够实时计算续航时间和续航里程数,剩余量达到预警值时向指挥组件报告。无人机侦察模型应能根据无人机机动模型给出的实时姿态参数和相对高程[7,8],指挥模型给出的任务区域坐标,模拟无人机侦察行为,并输出实时视点姿态参数;根据无人机性能模拟侦察结果上报与处理过程和效果。飞行器损伤模型能够向其他模型发送飞行器损伤事件。图2显示了侦察无人机战场侦察IDEF0模型的A0图。
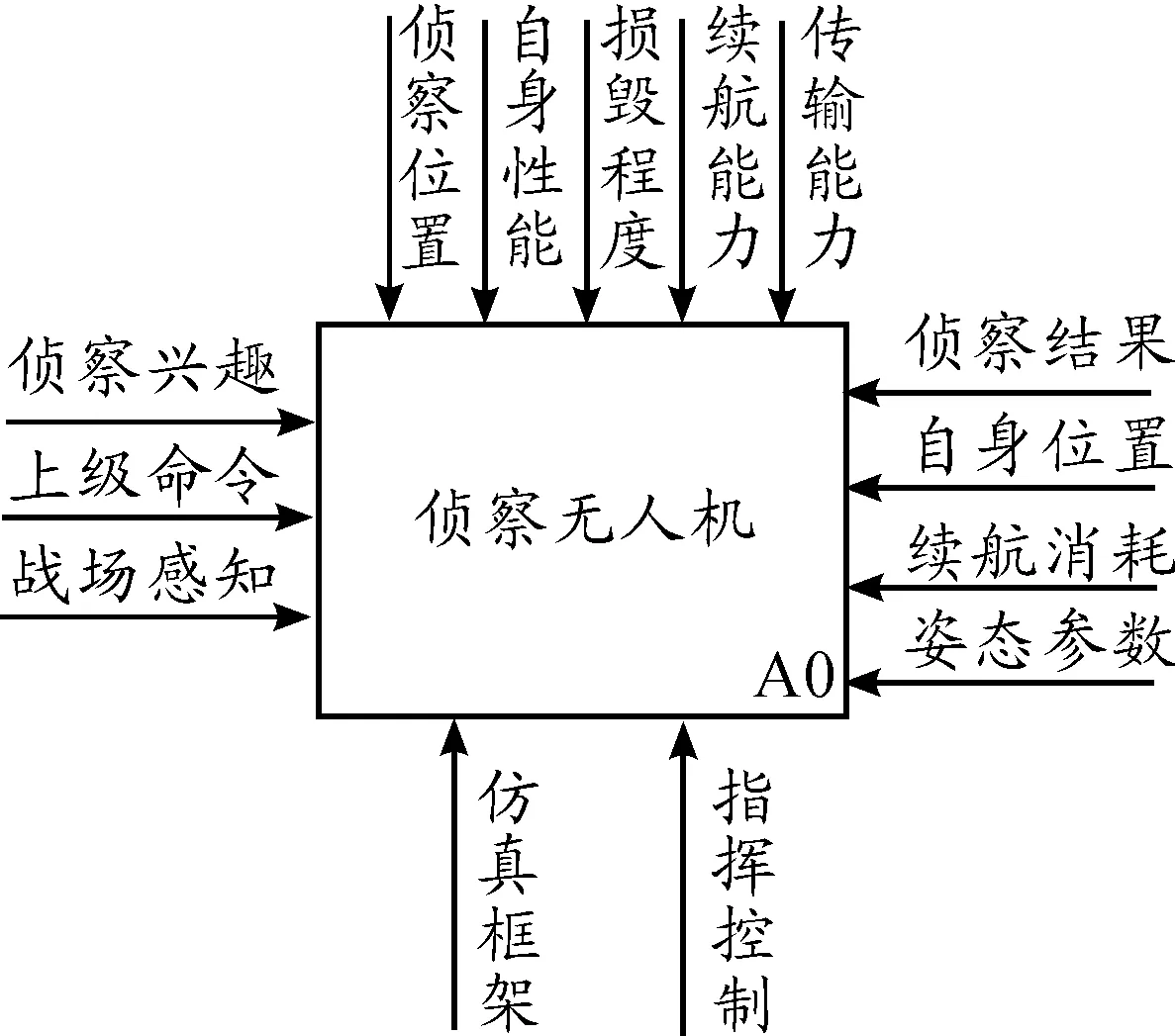
图2 侦察无人机战场侦察 IDEF0模型 A0图
2侦察无人机机动任务参数
侦察无人机指挥模型根据上级命令、战场威胁,结合无人机飞行性能指标规划出起飞位置至降落位置间最优的飞行路线,将其描述为一组导航序列点传递给无人机机动模型。同时,应向机动模型和侦察模型传递侦察区域顶点坐标,并考虑进入侦察区域的高度和飞行方向。
无人机飞行路线的确定,需要考虑多种因素的影响,是一个十分复杂的过程[9-13]。飞行路线可用导航点NAV[n]表示。起点S、目标点T加上每一个转向点组成了导航点坐标序列{S,NAV[1],NAV[2],NAV[3],…NAV[n],T}。指挥模型须将导航点序列、侦察区域顶点坐标、起飞时间作为无人机机动必要参数传递给机动模型。
3侦察无人机机动模型
侦察无人机的机动,可以按照无人机指挥模型在起飞前预定的导航点序列实施,也可按照地面控制单元遥控实施,或在2种模式中相互切换。其机动过程,从指令输入输出过程来看,是非线性过程;从其空间位置和姿态变化过程来看,是线性过程。在建立其机动模型的过程中,应注意把握离散的导航点上无人机位置和姿态随仿真时间推进而产生的线性变化过程。
假设某时刻无人机姿态为Posture1,到达下一导航点时姿态为Posture2,这个过程中经过了一系列连续的变化Maneuver(P)。其中P反映了变化过程中的各种机动参数。
3.1初始化阶段
在初始化阶段,模型读取装备参数文件,将相关性能参数初始化。而后,机动模型接收指挥模型传递的飞行命令参数,主要是程控飞行路径参数、侦察区域坐标、起飞姿态和起飞时间等。同时,机动组件计算总飞行路程,验证无人机执行任务能力。根据起飞姿态,计算起点至第一导航点是否超过最小起飞距离,即能否在该距离内爬升至预定高程。若不能,则应规划出盘旋上升路线。然后触发起飞事件。
3.2飞行阶段
飞行过程包括起飞阶段,巡航阶段与降落阶段。模型将飞行过程离散化为一定仿真步长的定时事件序列。定时事件主要执行速度计算、方位角计算、侧倾角和俯仰角计算事件,其中速度计算包括水平方向速度计算和垂直方向速度计算。这些计算的主要依据是飞行导航点序列和各类事件导航点序列。事件导航点包括除飞行导航点外的转弯导航点、绕行导航点、侦察区域扫描飞行导航点。这些事件导航点的执行主要由定时事件根据相应条件触发,由角度计算函数检测本无人机已通过最后一个导航点后结束。另外,定时事件还应检查临时手控命令、新的飞行任务事件、飞行器损伤状态、剩余续航里程、剩余续航时间、降落事件并做出相应响应,同时应向侦察模型输出无人机位置、姿态和视角参数。其具体执行步骤如图3所示。

图3 飞行阶段定时事件流程
3.3绕行事件
无人机在飞行过程中,存在影响飞行器飞行的地形地貌和气象因素,以及影响飞行的电磁干扰,加之敌方防空火力的打击威胁等,使无人机机动模型必须检查飞行区域中是否有上述不可通行区域。该区域位置以圆心加半径的参数形式由仿真支撑环境提供。当飞行路线穿越该区域时,模型应自动计算出绕行路线,并以绕行导航点序列的形式存储记录,计算飞行总距离,验证无人机执行任务的能力,规划飞行速度、绕行时机和各段路线的飞行姿态。
如图4所示。NM为无人机机动路线上的一段,N与M是2个导航点。半径为r的实线圆O为不可通行的障碍物范围。设OL⊥NM,则从绕行距离最短的原则考虑,设定O点位于NM左侧或在NM上时,无人机从右侧绕行;O点位于NM右侧时,无人机从左侧绕行。绕行距离最远的极端情况,即当圆点O位于NM上时。设绕行导航点为A、B、C、D。其中A、D位于原行进路线上,B、C位于与障碍圆O同圆心且半径为R的大圆上,且∠AOB=∠BOC =∠COD=π/3。设无人机发现障碍距离与障碍物半径之比为S,则有AO=OD=S×r。因OH⊥BC,则在⊿BOH中,OB长度为R,为避免与障碍物碰撞,OH长度应大于r,则有
(1)
可取
R=1.5×r
(2)

图4 无人机绕行导航点计算示意图
无人机在机动过程中,每次执行位置更新事件时均检测飞行方向前固定距离处的点是否进入障碍物内部,如果进入则开始减速至绕行速度,绕行结束后加速至原有速度。当飞行至A点时,产生绕行导航点序列,触发绕行事件。绕行导航点的计算关键是计算D点与B,C两点位置。在笛卡尔坐标系中,设θ为绕行前的方向角,γ为AO的方向角(0<θ<2π,0<γ<2π),A点坐标(XA,YA)可由AO及其方向角求出,则有

(3)
D点坐标(XD,YD)
(4)
当θ≤π,θ≥γ≥0或γ>π+θ时,或当θ>π,θ>γ>θ-π时,O位于飞行线路右侧,则B点坐标(XB,YB)
(5)
C点坐标(XC,YC)
(6)
当θ≤π,θ<γ<θ+π时,或当θ>π,θ<γ或γ<θ-π时,O位于飞行线路左侧,则B点坐标(XB,YB)
(7)
C点坐标(XC,YC)
(8)
3.4转弯事件
无人机在接近导航序列点时须产生转弯事件。机动过程中,无人机每次执行位置更新事件时检测距离下一导航点是否小于预定值,如果小于则开始减速至转弯速度,转弯结束后加速至原有速度。如图5所示,无人机转弯时,根据飞行导航点产生的夹角∠BAC,计算生成位于半径为r的圆弧上的n+1个转弯点序列(以4个点为例)。其中M、Q为切点,O为圆心,N、P将圆弧平均分成n+1份,(M,M1,M2,M3,M4,…Mn)为生成的转弯点序列。设导航线路上的转弯角∠BAC为α,转弯弧相对的圆心角∠MOMn为β,θ为转弯前的方向角,γ为转完后的方向角(0<θ<2π,0<γ<2π),A点坐标为(XA,YA),则有

(9)
其中(0<α<π)
β=π-α
(10)
(11)
则M点坐标(XM,YM)
(12)
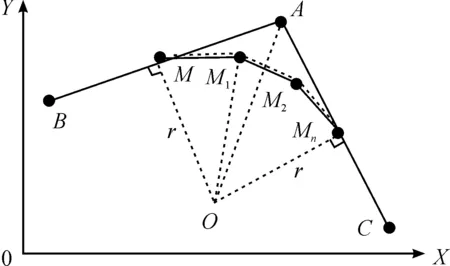
图5 无人机转弯导航点计算示意图
当θ≤π,θ>γ≥0或γ>π+θ时,或当θ>π,θ>γ>θ-π时,无人机右转,则转弯圆心的坐标(XO,YO)
(13)
则除M外第m(0 (14) 当θ≤π,θ<γ<θ+π时,或当θ>π,θ<γ或γ<θ-π时,当无人机左转,则转弯圆心的坐标(XO,YO) (15) 则除M外第m(0 (16) 3.5规划扫描路径 侦察扫描区扫描路径所需关键导航点如图6所示。其中点1为进入区域前的调整点,无人机在此点调整方向向点2飞行。2、3为航线与进入侦察区域第一、二个交点,1、2间距离为预设值。4、5、6为转弯点,其算法参照转弯算法,后续各点与此相似。设侦察摄影相机感光元件感光区域边长为L,焦距为f,扫描飞行过程中,无人机相对高程为H,则点3与点10间距离为(0.8L×H)/f,即侦察照片行间应重叠20%。扫描过程中飞机高程不变。 图6 侦察扫描区扫描路径示意图 3.6任务更新事件 在无人机飞行的过程中,可能出现指挥员临时中断飞行任务,改为手动操作或更新飞行任务的情况,这类情况的处理主要通过任务更新事件实现,其主要执行清空事件导航点事件,更改手动飞行标示变量Manual的值,接收指挥模型传输的速度与姿态参数变化以实现模拟手控操作,或接收新的飞行任务点。其主要执行步骤如图7所示。 4算法验证与实验结果 为验证本研究转弯与绕行算法,现以某侦察无人机为例,规划出起点为(0,0,100),导航点分别为(400,-600,100)、(400,-100,100)、(850,-550,100)、(0,-100,100)的飞行路线,如图8所示。同时,在飞行路线中设置两障碍物分别位于路线右侧和左侧。图8中虚线表示导航点连线,虚线圆表示障碍物范围。经编程验证,按照产生4个转弯导航点转弯,无人机在该转弯时段飞行路线如图8所示。 图7 任务更新事件流程 图8 无人机转弯与绕行算法验证 经验证可看出,转弯算法能够依照转弯导航完成转弯动作。绕行算法能够自行判断障碍物大小,并选择其与导航线路相对位置的对面以最短绕行路线实施绕行,与障碍物保持一定距离,实现了预期效果。 另一条规划路线中穿过预定侦察区域,如图9中所示。预定飞行路线为(0,0,100),(1 200,-600,100),(1 200,-50,100),(0,0,100)。图9中虚线矩形表示侦察范围,虚线表示导航点连线,虚线圆表示障碍物范围。侦察区域2个对角坐标为(150,-75,100),(950,-725,100)。当无人机飞临侦察区域时,模型根据侦察区域形状规划出进入位置和相应调整点与导航序列点,完成区域扫描飞行任务。相机扫描宽度250m,飞行航线间距离为200m,实现了照片重叠20%。当飞出扫描区域经过调整点(1 000,-600,100)时,迅速返回预定机动路线完成机动任务。 图9 无人机侦察扫描路线规划 5结论 本研究论述了陆军合成分队编制内的战术侦察无人机机动仿真的相关模型,研究了无人机机动过程中主要事件的仿真方法,对转弯算法、绕行算法以及扫描侦察飞行算法进行了设计。经编程实验证明,算法初步实现了对陆军合成分队作战仿真中无人机机动的仿真,模拟结果符合实际情况和仿真要求。本研究对无人机性能的模拟采取了一定程度的简化,应在下一步研究中进一步改进完善。 参考文献: [1]严建林.基于进化算法无人机航路规划技术研究[D].南京:南京航空航天大学,2008. [2]AntoniosTsourdos,BrianWhite,MadhavanShanmugavel.无人机协同路径规划[M].祝小平,周洲,王怿,译.北京:国防工业出版社,2013. [3]周剑勇,蒋自成,王跃峰.飞行器机动飞行分布式仿真系统研究[J].系统仿真学报,2011,23(11):2391-2394. [4]代冀阳,杨兴廷,吴剑.无人机俯仰角程序调参控制律设计[J].计算机仿真,2013,30(1):74-77. [5]王鹏,朱元昌,邸彦强.自行高炮CGF实体智能机动行为仿真[J].计算机工程与应用,2012,48(2):227-229. [6]薛鹏,肖前贵,高艳辉.某无人机飞控系统半实物仿真平台设计[J].现代电子技术,2012,35(13):111-118. [7]孙丽卿.无人机仿真训练系统[J].计算机仿真,2006,23(2):44-46. [8]李浩.某型无人机飞控系统仿真平台研究[D].南京:南京航空航天大学,2011. [9]郭齐胜,杨立功,杨瑞平.计算机兵力生成导论[M].北京:国防工业出版社,2006. [10]李京伟.多分辨率建模在航母战斗群作战仿真中的应用研究[J].系统仿真学报 2013,25(8):1924-1929. [11]吴森堂,费玉华.飞行控制系统[M].北京:北京航空航天大学出版社,2010. [12]张骑,尹全军,黄柯棣.基本对象模型概念研究[J].系统仿真学报,2005,17(7):1667-1670. [13]侯波南.并行离散事件仿真概念建模技术研究[D].长沙:国防科学技术大学,2009. (责任编辑周江川)


 猜你喜欢
电脑知识与技术(2016年28期)2016-12-21新教育时代·教师版(2016年27期)2016-12-06农机使用与维修(2016年10期)2016-11-10人间(2016年26期)2016-11-03科技视界(2016年22期)2016-10-18企业导报(2016年9期)2016-05-26
猜你喜欢
电脑知识与技术(2016年28期)2016-12-21新教育时代·教师版(2016年27期)2016-12-06农机使用与维修(2016年10期)2016-11-10人间(2016年26期)2016-11-03科技视界(2016年22期)2016-10-18企业导报(2016年9期)2016-05-26