基于CCD 的莫尔条纹计数器系统研究
2015-12-23 02:27刘仲禹
科技视界 2015年31期
刘仲禹
(长春理工大学光电信息学院,吉林 长春 130012)
1 系统工作原理
本系统以面阵CCD 作为光电传感器接收待测的图像信号。CCD传感器将莫尔条纹图像信号转换为视频信号,视频信号中每一个离散电压信号的大小对应该光敏元所接收光强的强弱(用y 轴表示),而信号输出的时序则对应CCD 光敏元位置的顺序(用X 轴表示)。则CCD所接收的光强与CCD 光敏元位置的关系如图所示。

图1 CCD 所接收的光强与CCD 光敏元位置的关系
系统中通过单片机数据采集电路完成对CCD 像元固定点采样,并将采集结果通过串行口发送给PC 机,PC 机数据处理系统对数据进行处理,对比同一点的电压变换次数就可以得知经过该电位置的莫尔条纹个数。采用CCD 的优点就在于可以同时采集多个点的电压变换情况,使数据测量更为准确,同时在该系统的基础上稍微改动就可以用它进行光谱数据的采集,非常方便,实用。
2 莫尔条纹实验原理
根据栅式数字传感器的工作原理,可分为光栅和磁栅两种。光栅是由很多等节距的透光缝隙和不透光的刻线均匀相间排列构成的光电器件。按其原理和用途,它又可分为物理光栅和计量光栅。物理光栅是利用光的衍射现象制造的,主要用于光谱分析和光波长等量的测量。计量光栅按应用范围不同又分为透射光栅和反射光栅两种,具体制作时又可制作成线位移的长光栅和角位移的圆光栅。按光栅的表面结构,又可分为幅值光栅和相位光栅等。幅值光栅是利用照相复制工艺加工成栅线与缝隙为黑白相间结构,故又称为黑白光栅。实验中用的就是这种光栅。
栅式传感器的测量电路。
1)光电转换
主光栅和指示光栅做相对移动产生了莫尔条纹,莫尔条纹需要经过转换电路才能将光信号转换成电信号。光栅传感器的光电转换系统由聚光镜和光敏元件组成(也就是摄像机和镜头,摄像机也就是CCD器件是由许多个光敏元件组成),当两块光栅做相对移动时,光敏元件上的光强随莫尔条纹移动而变化,如图2。

图2 光强变化
在a 处,两光栅刻线重叠,透过的光强最大,光电元件输出的电信号也最大;c 处由于光被遮去一半,光强减少;d 处的光全被遮去而成全黑,光强为零;若光栅继续移动,投射到光敏元件上的光强又逐渐增大,因而形成了如图A 所示的输出波形[9]。
光敏元件输出的波形可由下面的公式,描述:
U=U0+Umsin(2πx/W)
式中:U0——输出信号的直流分量;
Um——交流信号的幅值;
x——光栅的相互位移量。
由上面公式可以知道,利用光栅可以测量位移量x 的值。
2)辨向原理
为了辨别主光栅是向左还是向右移动,仅有一条明暗交替的莫尔条纹是无法辨别的,因此,在原来的莫尔条纹上再加上一条莫尔条纹,使两个莫尔条纹信号相差π/2 相位。实现的方法是在相隔1/4 条纹间的位置上安装两只光敏元件,如图3 所示。
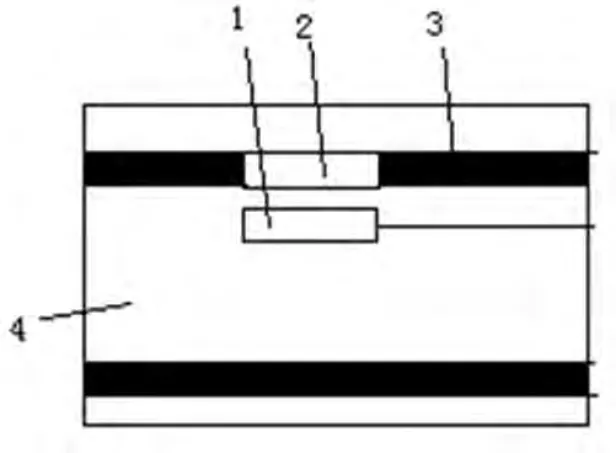
图3
两种信号经整形后得到方波U1’和U2’。当主光栅右移(见图b,d)时,U1’的微弱信号与U2’相与得到正向移动脉冲,从与门Y1输出;而U1’倒相后微分,在与门Y2相与,由于在U1’的微分脉冲出现时,U2’是低电位,故Y2没有输出脉冲。当主光栅左移时,U1信号超前U2信号π/2相位,U1’的倒相方波经微分后,在与门Y2上相与;U1’微分信号与U2’在与门Y1上相与的结果正好和右移情况相反,而Y1没有脉冲信号输出,Y2有脉冲信号输出。这样就实现了主光栅左右移动的方向辨别。

图4 右移波形

图5 判向电路
3)细分原理
如果仅以光栅的栅距作其分辨单位,只能读到整数莫尔条纹;倘若要读出位移为0.1μm,势必要求每毫米刻线一万条,这是目前工艺无法实现的。因此,只能在有合适的光栅栅距地基础上,对栅距进一步细分,才可能获得更高的测量精度。常用的细分方法有倍频细分法,电桥细分法等。这里介绍四倍频细分法,其他方法可以参考相关文献。
在一个莫尔条纹宽度上并列4 个光电元件,如图所示,得到相位分别相差π/2 的四个正弦周期信号。用适当电路处理这一列信号,使其合并得到如图所示的脉冲信号。每个脉冲分别和四个周期信号的零点相对应,则电脉冲的周期为1/4 个莫尔条纹宽度。用计数器对这一列脉冲信号计数,就可以读到1/4 个莫尔条纹宽度的位移量,这样便到光栅固有分辨率的4 倍。
3 检测莫尔条纹的光学成像系统设计
3.1 莫尔条纹特征
1)莫尔条纹是由光栅的大量刻线共同形成的,对光栅的刻划误差有平均作用,从而能在很大程度上消除光栅刻线不均匀引起的误差。
2)当指示光栅沿与栅线垂直的方向作相对移动时,莫尔条纹则沿光栅刻线方向移动(两者的运动方向相互垂直);指示光栅反向移动,莫尔条纹亦反向移动。在图中,当指示光栅向右移动时,莫尔条纹向上运动。
3)莫尔条纹的间距是放大了的光栅栅距,它随着指示光栅与主光栅刻线夹角θ 而改变。θ 越小,L 越大,相当于把微小的栅距扩大了1/θ倍。由此可见,计量光栅起到光学放大器的作用。
3.2 光学成像系统设计
光学成像系统的作用是使光学莫尔条纹能够清晰地呈现在CCD图像传感器上。在该实验中,把两块光栅距相等的光栅平行安装,主光栅与指示光栅,使两光栅保持平行,光栅间间隙要尽量小,微调主光栅角度,并且使光栅刻痕相对保持一个较小的夹角θ 时,透过光栅组可以看到一组明暗相间的条纹清晰可见,即为莫尔条纹。莫尔条纹的宽度B 为:B=P/sinθ 其中P 为光栅距。光栅刻痕重合部分形成条纹暗带,非重合部分光线透过则形成条纹亮带。
4 误差分析
影响测量精度的因素有很多,有些是可以通过减少误操作等方式来避免或是减少;而有些误差是在所设计系统中所固有的或是操作环境中存在的,是不可避免的。下面就影响测量结果的主要方面进行误差分析:
(1)光栅组的影响
为使CCD 摄取的莫尔条纹图像清晰,光栅组一定要平行,且间距要尽量小,即目测时莫尔条纹的暗带要足够黑,确定后光栅组一定要安装紧固,以防平台位移时因两片光栅相碰擦造成光栅角度的变化,使莫尔条纹的宽度发生变化。如果光栅片相隔较远,则暗带条纹发红发黄,软件就可能会错误地读取信号,错误地计数。
(2)光源的影响
实验时要注意背景光的影响,如果光照太强,有可能造成自动记数软件误读数。
(3)环境因素误差
其它的许多不可预知的因素可能会对测量产生影响:如环境温度、湿度对测量器件的性能影响。一般情况下,可以忽略此类影响。
(4)CCD 输出噪声误差
主要的噪声为散粒噪声、暗电流噪声和复位噪声,其中复位噪声是主要的干扰源。
减小误差的方法:
1)针对CCD 的输出噪声误差,可以采取多点采集方法减小误差。
2)实验过程中尽量保持安静的环境,且实验台要稳定无振动。
[1]史立生,贾彦枝,左俊玲.迈克尔逊干涉仪干涉条纹计数器.河北师范大学学报,1996.
[2]王守权,张绍良,张薇.干涉条纹计数器的研制.长春邮电学院学报,2000.
[3]张黎丽,莫长涛.条纹计数器在光学实验中的应用.大学物理实验,2002.
猜你喜欢
新技术新工艺(2022年10期)2022-11-21
山东陶瓷(2021年5期)2022-01-17
花火·绘阅读(2021年8期)2021-09-05
少儿美术(2020年1期)2020-12-06
童话世界(2019年28期)2019-11-23
光学精密工程(2016年5期)2016-11-07
云南中医学院学报(2015年2期)2015-07-31
云南中医学院学报(2015年3期)2015-07-31
出版与印刷(2014年3期)2014-12-19
知音海外版(上半月)(2014年10期)2014-05-14