卫星导航系统接收机原理与设计
——之一(下)
2015-12-22 10:31:29刘天雄
卫星与网络 2015年8期
+ 刘天雄
卫星导航系统接收机原理与设计
——之一(下)
+ 刘天雄
2.2 射频前端
通常天线接收到的导航卫星信号不仅功率极其极低,而且掺杂着噪声并且伴随着各种有意无意的干扰信号,一般情况下导航信号弱于背景噪声,例如,GPS系统L1频段的信号地面功率为-160dBW,民用L1频点的信号功率比背景噪声低16dB,美国军用P码信号功率比C/A码信号功率密度低13dB,GPS信号强度如图5所示。因此,导航信号很容易受到干扰,安全性比较差,接收机在开展相关信号处理前首先要放大接天线收到的导航信号。

图5 GPS信号强度
接收机射频前端定义为接收天线到模数转换器之间的所有部件,它是将天线接收到的无线电导航信号进行滤波、低噪声放大、再滤波、混频、再滤波和放大等一系列单元的组合,输出是具有一定增益的易于被数字采样的数字中频信号。主要作用是对接收到的导航信号进行预处理和下变频处理,信号预处理首先利用带通滤波器滤除带外干扰信号,然后对滤波处理的信号进行放大;下变频利用混频器将接收到的射频信号降频处理成为模拟中频信号,这就要求射频前端提供稳定、精确的本地晶振与输入信号进行混频。
2.2.1 基本结构
卫星导航接收机射频前端由带通滤波器(BPF)、放大器(Amplifier)、本地振荡器LO(Local Oscillator)、频率综合器(frequency synthesizer)、自动增益控制器AGC(Automatic Gain Control)、模数转换器ADC(Analog to Digital Converter)组成,射频前端基本结构如图6所示,其中频率综合器为接收机射频前端提供时间和频率参考。射频前端接收天线捕获到的无线电射频卫星导航信号,完成射频信号下变频(down-conversion)、滤波(filtering)、放大(amplification)、采样(sampling)等信号处理任务,射频前端又称为前置放大器。
射频处理前端首先利用带通滤波器(BPF)滤除波段外的噪声干扰,利用放大器放大信号,滤波放大后的射频信号与本地振荡器信号(LO)相乘,即混频处理号,然后再次利用带通滤波器(BPF)滤除噪声信号,滤除高频分量并获得中频(intermediate frequency)模拟信号,简称IF信号,中频信号保留载波信号上所调制的全部数据和信息;最后利用模数转换器(ADC)将模拟中频信号数字化处理,获得数字中频导航信号,包括I支路同相(in-phase)分量和Q支路正交(quadrature)分量。
1 滤波和放大模块Filtering and Amplification
由于卫星导航信号功率较低,例如,用户接收到GPS全球定位系统L1频段的信号功率为-160dBW,其微弱程度相当于一只50W普通灯泡的光从20000Km的GPS卫星轨道空间照射到地球表面,而我们日常使用联通手机信号功率则为-134dBW,也就是说GPS用户接受到的信号强度大约只有手机信号的1/400。通常在接收机天线后端需要一套滤波和低噪声放大电路LNA(Low-Noise Amplifiers),其作用是滤除接收到的射频信号的噪声并去除带外干扰信号,同时补偿导航信号的空间传播损耗(transmission losses)。

图6 卫星导航接收机射频前端基本结构

图7 卫星导航接收机射频前端外差(左)和零差(右)下变频模块
2 本地振荡器和频率综合器模块
本地振荡器LO(Local Oscillator)的性能指标是短期稳定性(short-term stability)、长期稳定性(longterm stability)以及相位噪声(phase noise)。虽然大部分商业导航接收机采用一般的低成本晶体振荡器就能够完成用户任务,但是一些高端的导航应用,例如军事应用会采用高稳定度的原子频率振荡器(atomic oscillators)。
设计导航接收机频率综合器(f r e q u e n c y synthesizer)时,要考虑所要接收的导航信号的频点及其特征、信号采样频率、中频信号频率以及所期望获得的最大的综合性能等因素,例如考虑剔除带外干扰(out of band interference)、减少相位噪声影响(phase noise impact)以及剔除射频信号下变频谐波(out of band interference)等因素。
3 下变频模块 Down-conversion
射频前端的下变频模块的功能是将接收到的无线电导航射频RF(radio frequency)信号转换为中频IF(intermediate frequency)信号或者基带(baseband)信号,转换方法可以采用直接转换(direct conversion)技术,也可以采用零差法(homodyning)和外差法(heterodyning)等混合操作(mixing operations)技术。零差法和外差法通过对两个不同频率的信号进行混频,目的是将相同的信息调制到两个不同的频点,其中一个频点是两者的和频,另一个是两者的差频。混合操作技术的基础是接收机的本地振荡器LO,为了抑制谐音(harmonics)和镜像频率(image frequencies)靠近中频信号,需要选择设计本地振荡器LO的频率。零差和外差混合操作流程如图7所示。
目前接收机一般采用两步法(two-stage approach)外差混合操作下变频技术获取中频信号,信号下变频处理期间将产生两个不同的中频信号,代价是导致镜像频率分离,优点是可以使用低品质因数滤波器和低等级的模数转换器件,下变频设计手段更加灵活,进一步滤除带外噪声和干扰信号,同时可以剔除不想要的镜像频率信号。
对于零差法,一般采用一步法下变频技术获得中频信号,接收机本地振荡器调谐到导航射频信号频率,由于零差法混合操作下变频技术直接将导航射频信号转换成为基带信号,所有这种方法通常也可以称为直接转换技术。虽然零差法混合操作下变频技术比较简单,不需要使用中频滤波器,由此不需要处理镜像频率信号,但在处理导航射频信号时需要使用高品质因数的滤波器,品质因数(quality factors)是3dB带宽与中心频率的比值,其值越高则滤波器越尖锐,高品质因数滤波器意味着将提高接收机的成本。另一个问题是,如果直接将射频信号下变频到基带中频信号,则谐波接近零频,导致很难将其滤除。
这里需要简要说明导航射频信号直接采样(direct sampling)技术,即导航射频信号无须经过下变频处理为中频信号,对导航射频信号直接采样,虽然导航射频信号直接采样技术在设计上不需要混频器(mixers)本地振荡器(LO),但仍需要放大器和模数转换器。目前射频信号(1.2GHz~1.6GHz)的直接采样技术对信号处理硬件要求较高,从设计和成本两个因素考虑均不能在市场中大量推广使用。尽管当前接收机很难在设计上采用导航射频信号直接采样技术,但直接采样技术具有可以规避导航信号与本地振荡器不匹配造成的无用信号和误差等的显著优势,此外,直接采样技术降低了对时钟抖动(clockjitter)和噪声混叠(noise folding)的敏感度。
4 量化和采样模块 Quantization and Sampling
量化(Quantization),即通过模数转换器ADC(analog to digital converters)对接收到的导航信号进行数字化处理,确保量化误差(quantization errors)和动态范围(dynamic ranges)符合原始信号特征。模数转换将接收到的模拟信号转化成为离散数字信号(discrete digital signal),量化方法可以采用均匀量化(uniform)、非均匀量化(nonuniform)、中心量化(centered)、非中心量化(non-centered)等多种方式,具体取决于信号噪声特征,如图8所示。
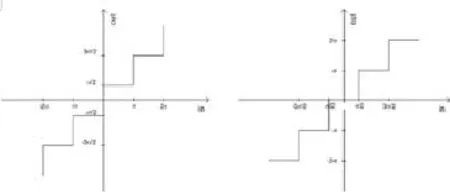
图8 非中心、非均匀量化(左),中心、均匀量化(右)
虽然大部分GNSS接收机都采用uniform量化技术,但是一些non-uniform量化技术,诸如Amoroso和DataFusion技术,具有一定的抗连续波CW(Continuous Wave)干扰(interference)能力。而自适应量化方法(Adaptive quantization methods),则能根据信号输出幅值自动调整量化电平(quantization levels)。
量化方法和量化范围的选择也取决于信号的噪声特征,对于GNSS接收机,接收到的导航信号的功率比较低,例如GPS卫星播发到地面的L1频段信号功率为-160dBW,其微弱程度相当于一只50W普通灯泡的光从20000Km的GPS卫星轨道空间照射到地球表面,因此,GNSS接收机模数转换器信号量化结果看起来与接收到的噪声信号类似。
在最大量化门限(maximum quantization threshold)L和信号噪声标准偏差(noise standard deviation)σ之间存在一个最优的比率,保证在相关输出时信噪比劣化最小,即

考虑量化位数的影响,一般2-bit量化时,信号量化损失1.5dB,1-bit量化时,信号量化损失3.5dB。对于GNSS信号和其接收机而言,上述信号量化损失是可以接受的。虽然采用1-bit量化器时可以不用自动增益控制AGC系统,并由此简化硬件设计,但是为了提高接收机抗干扰能力,信号增益控制仍然需要自动增益控制AGC系统。
利用模数转换器ADC对输入的下变频处理后的基带中频导航信号完成采样时,需要选择合理的采样频率(sampling frequency)。事实上,对于卫星导航信号,采样频率不应该是1.023 MHz的倍数,根据Nyquist–Shannon采样定理,采样频率需要代表并能够复制原始信号,如果信号单边基带带宽为B,则采样频率需要大于两倍的带宽,即
信号的中心频率(centre frequency)和频谱(spectrum)被移动,同时进行全部频谱的N次叠加。由此,为了避免信号混叠效应,生成的复制信号在处,不能交叠,如图9所示,图9中上图为原始信号,图9中中图为采样频率满足Nyquist采样定理要求,图9中下图为采样频率不满足Nyquist采样定理要求,发生了频率混叠现象。


图9 Nyquist-Shannon采样定理示意图
5 自动增益控制模块 Automatic Gain Control
自动增益控制AGC与导航线号下变频和采样量化紧密关联,自动增益控制AGC器是一个自适应闭环控制系统,以增加信号动态范围(dynamic range)、控制量化电平(quantization levels)、优化最大量化门限和信号噪声标准偏差之间比率。
自动增益控制AGC有多种实现方式,根据接受信号幅值调整信号增益是最常用的方法,这种方法完全在模拟域实现增益控制。另一个方法是根据自动增益控制AGC器输出的Gaussian分布概率密度,匹配信号输入输出功率大小,调整自动增益控制AGC的增益。
然而,在存在连续波CW干扰的情况下,传统的自动增益控制AGC器性能受到较大影响,如果干噪比J/N(Jammer-to-Noise)为20 dB,则信噪比SNR下降约10 dB。为了降低连续波CW干扰影响,可以采样动态调整量化间隔技术,或者采样过量化技术,以增加自动增益控制AGC动态范围。如果存在脉冲干扰(pulsed interference),可以采用数字消隐(digital blanking)等附加量化位技术,量化数值与动态门限相比较,如果采样值超过门限,则该采样值被置零。
2.2.2 信号带宽 Signal Bandwidth
除了电气设计,设计卫星导航接收机射频部分(包括天线和前端)时,需要根据使用环境和应用范围考虑信号结构(频谱和带宽)。卫星导航系统新的星座设计以及新的信号调制方式带来了不同的频谱分配和带宽选择方案。例如,表1给出了GPS系统L1频点和Galileo系统E1频点信号特征,两者中心频点相同,均是1575.42MHz。
对于GPS系统,如果接收机仅仅跟踪L1频点的C/A码信号,接收机天线需要满足4.092 MHz带宽信号接收需求,对于Galileo系统,由于其信号设计和信号扩频特性,跟踪E1频点的B/C码信号时,接收机天线需要满足两倍的4.092 MHz带宽信号接收需求。当然,接收并处理越多的信息,接收机定位精度也将越高,因此,用满足接收带宽要求的一副天线,同时接收GPS系统L1频点和Galileo系统E1频点信号的双星座接收机,将使用户从GPS和Galileo两个卫星导航系统中同时获取最大效益。
双频接收机(Dual-frequency receivers)需要使用双波段接收天线(dual-band antennas),其射频前端带宽规模要与接收机的应用场景、定位精度以及可实现的技术相匹配。例如,测量型接收机需要更宽的信号接收带宽以获得更高的定位解算结果;然而,一些低成本接收机只需要一副接收天线,其射频前端带宽约为2 MHz,就能够接收足够功率的导航信号并能获得“米级”定位精度。接收机定位解算的精度不仅与天线及射频前端的带宽成比例,而且也与数字信号基带处理的能力和功耗成比例。
2.2.3 从射频信号到中频基带信号 From RF to Baseband
卫星导航接收机接收到的信号可以表示为(忽略噪声):

例如,GPS系统L1频点信号可以写为:

式中:


图10 GNSS接收机基带数字信号处理通道
在这个阶段,模数转换器ADC对接收到的导航信号进行采样处理,采样处理后的离散数字信号分别与本地数字正弦波以及数字余弦波进行混频处理。混频处理将将中频(IF)信号转换称为基带(baseband)信号,同时保留原始相位信息:

信号是复变量,由此可以按同相(in-phase)I分量和正交(quadrature)Q分量,如下式:

最后,接收机数字基带处理模块(baseband processing block)负责处理上述基带信号。
2.3 数字信号处理模块Digital Signal Processing
卫星导航接收机的基带信号处理模块负责处理接收到的导航信号,例如捕获和跟踪视界范围内的每颗导航卫星的信号,基带信号处理模块的输入是下变频处理后的数字信号。一般卫星导航接收机的基带信号处理模块都有多个独立的处理通道,每个数字信号处理通道如图10所示,
图10中“Doppler Removal”为“多普勒频移去除”、“Local Codes generation”为“接收机生成的本地复制伪码信号”、“I & D”为“积分和清零(Integrate and Dump)”、“PLL”为“相位锁相环(Phase-Lock-Loop)”、“DLL”为“延迟锁定环(Delay-Lock-Loop)”、“Updated Carrier Phase”为“载波相位更新”、“Updated code delay”为“伪码延迟更新”、“data demodulation”为“信号解调”、“data processing”为“信号处理”、“lock detectors”为“信号锁定检测”。
导航接收机基带信号处理模块中的每个处理通道的结构完全一样,每个处理通道能够独立跟踪、处理某一颗导航卫星播发的信号。为了生成用户机和卫星之间的伪码测距观测量(code pseudorange)、载波相位测量值(carrier phase measurements)以及多普勒频移(Doppler frequency),每个处理通道的工作目标是跟踪导航信号的伪随机测距码延迟(code delay)和载波相位(carrier phase)。由此,每个处理通道至少有两个信号跟踪锁定环路,即跟踪伪码的延迟锁定环DLL(Delay Lock Loops)和跟踪载波相位延迟的相位锁定环PLL(Phase Lock Loops)。
根据多普勒频移预估值,基带数字信号处理模块清除采样信号后的多普勒频移,然后根据伪码相位延迟预估值,将采样信号与接收机本地生成的复制伪码信号进行相关处理,根据相关处理结果,得到新的多普勒频移和伪码相位延迟数据,然后重复进行采样信号与本地复制伪码信号相关处理,不断反馈计算,直到获得精确的多普勒频移和伪码相位延迟数据,通过比特位同步、帧同步得到卫星的子帧数据,解算出伪码测距值(code pseudo-ranges)、载波相位测量值(carrier phase measurements)以及导航电文数据(navigation data)。最后,基带数字信号处理模块集成每个通道的解算结果,根据三角测量原理,利用四个通道的处理数据就能解算出用户的位置坐标。
另外,根据不同的应用场景,基带数字信号处理模块需要配置一些专用的软件(算法),例如,多路径效应减缓、抗突发窄带干扰等。接收机还可以根据需求动态调整环路配置参数,例如,当接收机处于高动态工作环境状态时,为了避免跟踪环路失锁,可以增加相位锁定环PLL的带宽。
猜你喜欢
广东通信技术(2023年9期)2023-10-29 07:09:32
航天电子对抗(2021年2期)2021-05-31 02:02:40
电子设计工程(2017年20期)2017-02-10 03:39:32
火控雷达技术(2016年3期)2016-02-06 02:30:36
电信工程技术与标准化(2015年10期)2015-12-22 09:08:10
数字通信世界(2015年5期)2015-04-04 13:28:15
集美大学学报(自然科学版)(2015年4期)2015-02-28 01:13:39
石家庄理工职业学院学术研究(2014年4期)2014-04-27 14:14:41
电视技术(2014年19期)2014-03-11 15:38:10
电信工程技术与标准化(2013年4期)2013-08-09 08:22:28