
无人机搜索和跟踪的模糊认知控制器设计方法
2015-12-21 01:05崔军辉魏瑞轩张小倩祁晓明
中南大学学报(自然科学版) 2015年9期
崔军辉,魏瑞轩,张小倩,祁晓明
无人机搜索和跟踪的模糊认知控制器设计方法
崔军辉1, 2,魏瑞轩1,张小倩3,祁晓明1
(1. 空军工程大学航空航天工程学院,陕西西安,710038;2. 中国人民解放军69220部队,新疆阿克苏,842000;3. 第二炮兵工程大学402教研室,陕西西安,710025)
搜索和跟踪是无人机应用中非常重要的问题,采用模糊认知图理论提出一种智能控制器设计方法。所设计的模糊认知控制器在改变无人机动作行为的同时能使任务航线稳定而平滑地切换,地面操作员只需下达基本指令,就能够以外部事件节点激活和改变无人机执行搜索和跟踪任务的行为节点,实现人和无人机基于语义的高层次交互。研究结果表明:这种模糊认知控制器能够根据地面操作员指令等基本事件自动实现无人机行为的过渡和其运动轨迹的平滑切换,明显减小地面操作员的工作量。
无人机;搜索;目标跟踪;模糊认知图;运动轨迹
随着航空技术的发展,无人机(unmanned aerial vehicle,UAV)在航空领域中发挥着越来越重要的作用。UAV最突出的特点在于能够替代人类飞行员执行“枯燥、污染、危险(the dull, the dirty, the dangerous,3D)”的任务[1],与有人机相比,UAV能够昼夜持续工作,更具优越性。在UAV系统所承担的各种任务当中,搜索和跟踪是最常见也是最重要的任务之一,典型的例如美国的全球鹰、捕食者等无人机,其主要功能就是情报侦察、目标搜索、目标指示与定位、动态目标跟踪以及战场监视等[2],因此,研究UAV搜索和跟踪应用前景广阔、意义重大。UAV搜索和跟踪任务一般具有区域环境复杂性、目标运动不确定性、传感器设备不确定性和任务时间紧迫性等特点,这也使得该问题成为国内外无人机应用领域的热点和难点问题之一[3]。目前,国内外研究重点主要是多无人机协同搜索,研究内容主要包括2类:一类是针对区域内多个特定目标,如何实现以最小代价搜索和跟踪到尽可能多的目标;另一类是针对未知区域,如何有效分配和控制多架UAV以最小代价实现对该区域最大搜索范围覆盖。所采用的方法大部分是采用最优化思想,结合A*算法、人工神经网络、蚁群算法、多模型预测以及遗传算法等对搜索和跟踪问题进行优化求解,满足具体问题的最终需求[4−7]。但是这些算法一般来说时间开销较大,而且容易陷入局部最优,因此,很难得到实际应用。本文将模糊认知图(fuzzy cognitive maps,FCMs)理论用于UAV的搜索和跟踪应用中,建立无人机搜索和跟踪任务的FCMs模型,设计模糊认知控制器(fuzzy cognitive controllers,FCCs)。众所周知,FCMs在知识表示和推理决策方面有着广泛的应用[8],它可以模仿人类决策和处理问题的基本能力,通过灵活的概念获取来定义事件的行为序列,根据行为的协同和处理来达到控制目的。近年来,国内外已经有将FCMs用于地面机器人、车辆导航和规划以及飞行器燃油管理方面的应用[9−12],但将FCMs用于UAV系统导航和自主控制方面的应用和实例非常少,目前还没有采用FCMs理论处理UAV搜索和跟踪问题的应用。在无人机执行搜索和跟踪任务过程中,地面操作员通过基本事件节点下达任务指令,从而激活和控制搜索和跟踪任务的行为节点,与无人机进行基于语义的高层交互,而无人机结合机载传感器的输入信号通过FCCs响应这些高层指令,智能选择和自主改变其飞行行为,初步的仿真结果表明这种FCCs对于发展无人机的任务控制器提供了一种实际的解决方案,此外,这种智能控制器的使用将极大减小操作员的工作量。
1 FCMs理论
FCMs是Kosko等[13]融合了Zadeh的模糊集理 论[14]和Axelrad的认知图理论[15]提出的,它是模糊逻辑、神经网络、图论相结合的产物,是一种新型的知识表示和模糊推理的软计算方法[16]。FCMs用节点和有向弧表示现实环境中实体的概念和概念间的因果联系,通过节点间的关联来模拟实体之间的相互作用,从而刻画整个现实环境的动态行为。1个简单的FCMs如图1所示。

图1 简单的FCMs结构图
FCMs中的节点也称概念,用(1,2,3, …)表示,它可以用来描述系统的状态、属性、行为、动作等,每个节点可以在[−1, 1]区间内取值,表示该节点被激活的程度,其中,“+”表示正向激活、“−”表示反向激活,节点取值为“0”则说明该节点未被激活。系统在时刻的状态是所有节点在该时刻的值集,用状态向量表示为
FCMs的迭代推理过程,可以表示为
一般地,对于包含个节点的FCMs,为了保证每步迭代出的节点值都在[−1, 1]区间内,需要采用一个阈值函数()进行映射,每个节点在t+1时刻的值采用下式计算:
FCMs状态空间开始由初始条件给定,通过式(4)的迭代,最终系统稳定到1个固定点或者极限环,从而停止迭代,推理结束。复杂的FCMs还有可能终止于1个非周期的或者混沌的吸引子[17]。
2 无人机搜索和跟踪的FCMs模型
无人机在搜索和跟踪中动作和行为的改变会使其航线随之改变,因此,对于航线的控制必须根据UAV任务的上、下文语义来确定。在通常的UAV搜索和跟踪场景内,一般使用载有多普勒雷达和高分辨率光学图像传感器设备的UAV对多个地面移动目标进行搜索和跟踪。无人机起飞后,根据操作员的意图“进入”到指定的“搜索”区域,然后以固定高度对地面进行“搜索”,当雷达发现目标后,UAV则降低高度对目标进行“跟踪”,同时,实时的将机载光学传感器获得的跟踪图像传给地面操作员。若地面操作员满意传回的图像,则会“命令”UAV停止跟踪该目标、返回搜索轨道继续“搜索”更多的目标,最终,当燃料达到临界值时,UAV将会自动返回和着陆。根据专家知识,建立如图2所示的UAV搜索和跟踪的FCMs模型。
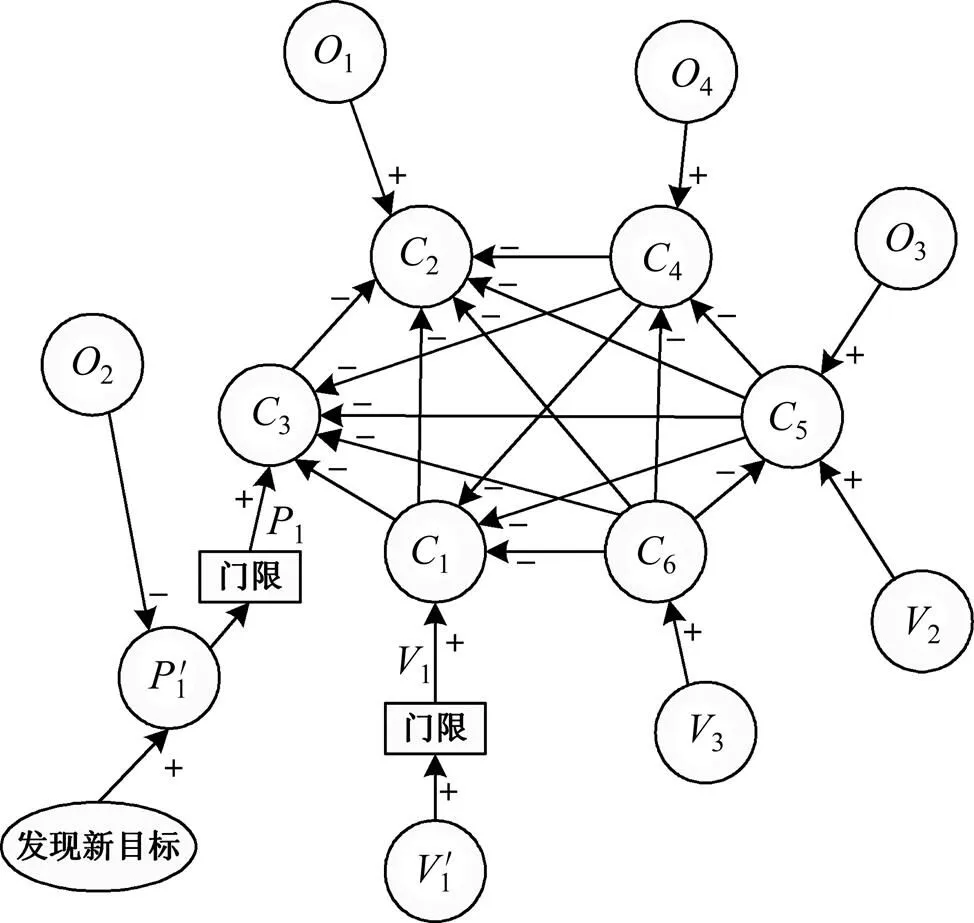
图2 UAV搜索和跟踪的FCMs模型
在该模型中,将节点分为2类:第1类称为行为类节点,表示UAV的运动和行为,包括“进入搜索区域”、“搜索目标”、“跟踪”、“盘旋”、“返航”和“自主着陆”等,相应于图2中的(1,2, …,6),行为节点是设计面向UAV搜索和跟踪模糊认知控制器的核心;第2类称为基本事件类节点,这些节点包含了操作员的指令、UAV内部传感器获取的自身高度、位置、燃料情况以及UAV有效载荷的输入信息等与UAV行为类节点有关的事件。表1所示为UAV搜索和跟踪的FCMs模型各节点含义。
通过改变无人机搜索和跟踪FCMs模型中相应基本事件类节点的序列或不同的激活模式,则可以产生不同的UAV动作和行为响应,这也是能够根据FCMs设计模糊认知控制器的基本依据。
假设所有节点的状态值只存在完全激活和不被激活2种状态,那么该FCMs模型的状态向量可以表示成以上所有概念的联合形式:

图2所示的邻接矩阵可以通过头脑风暴(brain-storming)法[18]等借助专家经验和知识。表2所示为UAV搜索和跟踪FCMs模型的邻接矩阵。邻接矩阵中每1行的所有元素表示该行节点的全部输出;每1列的所有元素表示该列节点的全部输入。由表2可知:基本事件类节点不会从行为类节点获得输入,但是它们可以由外部事件(发现新目标)或者基本事件驱动,例如,若雷达探测到新目标,则会激活节点1;而若地面操作员发出“停止跟踪这个目标”,则会使节点1从激活状态变为未被激活。基本事件类节点也可以由满足预先设定好的条件激活,例如,当UAV进入航线到达期望搜索区域的中心时,1被激活。FCCs的主要功能就是自动响应地面操作员、目标探测雷达以及UAV自身的状态监控等输入,产生平滑而稳定的搜索和跟踪航线。
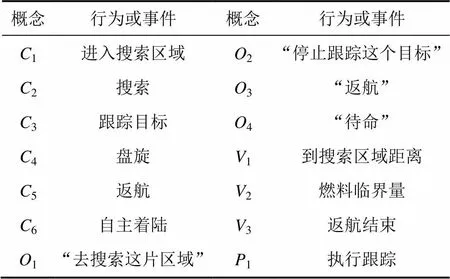
表1 UAV搜索和跟踪FCMs模型的概念
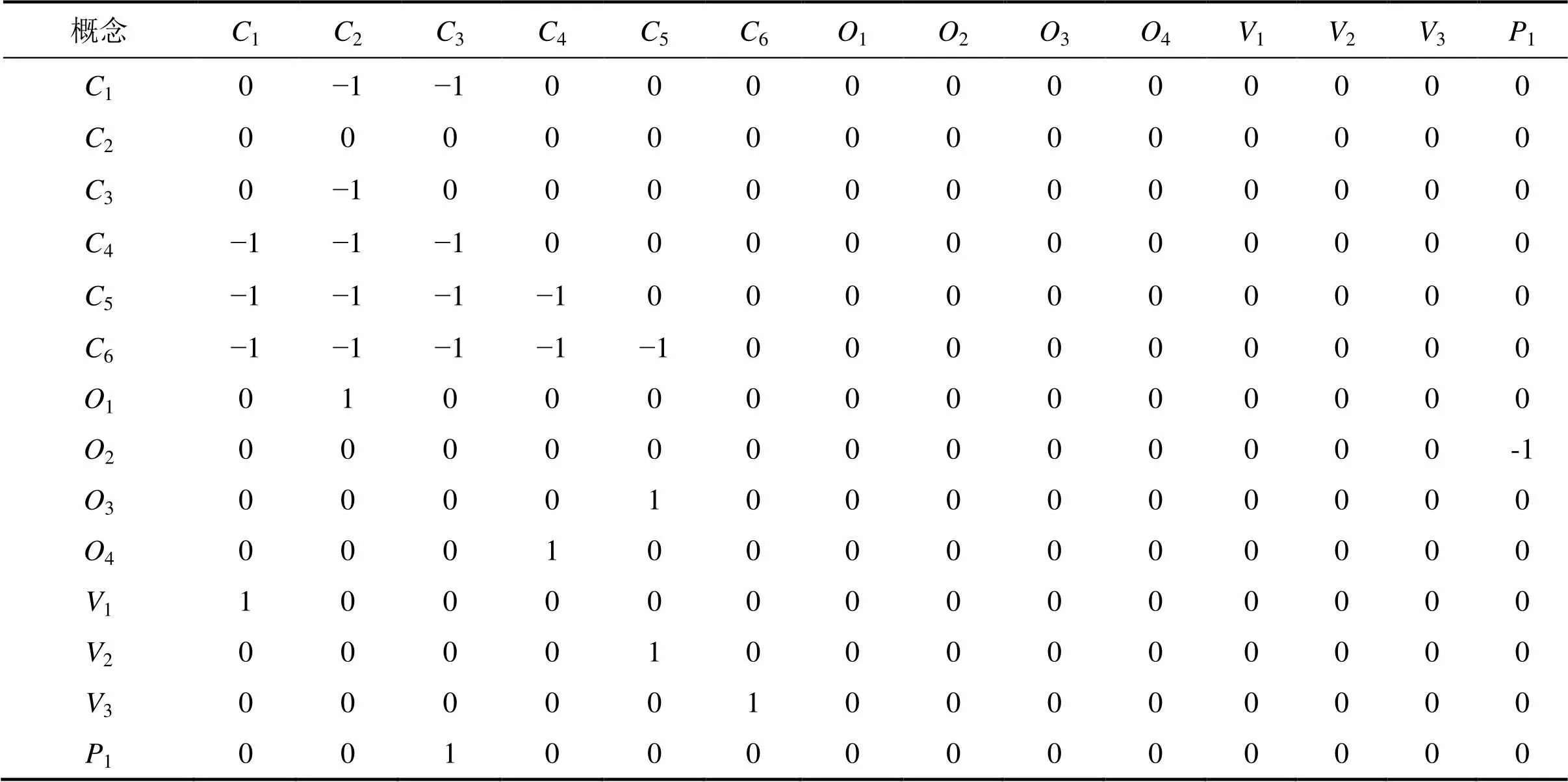
表2 UAV搜索和跟踪FCMs模型的邻接矩阵
在UAV执行搜索和跟踪任务之前,所有节点都未被激活,状态向量的所有元素取值为0。当任务开始时,地面操作员向UAV发出“去搜索”指定区域命令,这时节点1=1被激活,由于此时UAV距搜索区域有一定距离,因此,在地面操作员下达该命令的同时,节点1也相应被激活,于是,初始状态向量为
根据式(4),选择一个可以将状态值映射到[0,1]内的激活函数进行迭代,直到状态向量收敛到固定点,每一步的迭代结果如下:
经过3次迭代,状态向量收敛到了固定点,此时,UAV动作行为的结果为1(进入搜索区域),这也是执行完“去搜索某个区域”指令所期望的结果。
3 UAV搜索和跟踪的FCCs设计
3.1 FCCs设计的原理
UAV搜索和跟踪的FCMs模型提供了如何根据基本行为设计智能控制器的思想。首先,通过采用FCMs强大的建模能力对UAV搜索和跟踪全过程的动作行为建模,并将与这些行为有内在联系的操作员的指令、UAV自身高度、位置、燃料情况以及有效载荷的输入等事件包含在模型当中。其次,由于在该模型中,UAV的每个行为都对应着不同的航线,一般来说,“进入搜索区域”行为1对应的航线是1条固定高度的预先规定好航路点的运动轨迹;“搜索”行为2对应的航线是以固定高度、固定半径绕搜索中心的圆形轨道;“跟踪目标”行为3对应的航线也是圆形运动轨迹,只是UAV的飞行高度和半径等参数与2对应的航线有所不同;相应的,“盘旋”行为4、“返航”行为5以及“自主着陆”行为6都分别对应着不同航线。FCCs的设计原理是通过基本事件的内在驱动来处理和协同UAV搜索和跟踪中的行为节点,从而使一个行为到下一个行为能够稳定而平滑的过渡和切换。
3.2 行为过渡的平滑机制
为了使行为之间能够平滑过渡,采用等级限制的机制,在UAV搜索和跟踪的FCMs模型中加入1个虚拟的门限节点,图2中方框所代表的节点。以从“进入搜索区域”行为1到“搜索”行为2的过渡进行说明。当UAV到达指定的搜索区域中心后,任务剖面需要由行为1向2过渡,UAV在这个过程中的航线要从1个近似线性的运动轨迹过渡到1个圆形的轨迹,相应地,1由1变为0;而2则由0变为1。为了保证过渡航线的平滑,采用如图3所示的函数来控制和调节1从1到0切换,其计算公式为
采用这种等级限制机制对基本节点1进行处理,随着时间的推移,1的衰减将使行为节点1和2的状态值发生改变,从而使系统的状态向量不断变化。假设节点1在UAV进入搜索区域后按照式(10)衰减到比1稍小的1个值,取1=0.95,这时系统的状态向量也相应的变为
通过式(4)迭代推理,直到状态向量收敛,此时有
从图3可见:基本事件节点1状态值的微小变化,通过FCCs的处理可以使行为节点1产生微小的衰减,同时也使行为节点2增加1个很小的值,这一过程通过式(10)连续的过渡转化,直到线性地进入搜索区域航线与圆形的搜索航线完全融合。搜索行为2到跟踪目标行为3也采用类似的行为过渡平滑机制,通过FCCs处理将2个不同的圆形航线完全融合。
3.3 UAV运动轨迹和行为的协同
假设有效载荷传感器固联在UAV的机体中心,搜索和跟踪目标对应的圆形轨道的高度和半径是由机载图像传感器的视野和所能探测到的范围确定的,若不考虑图像传感器随云台运动的情况,则可以认为搜索和跟踪航线是1个高度为、搜索(跟踪)半径为的圆形投影,如图4所示。不同的UAV运动轨迹的切换过程可以认为是FCCs对其行为的协同处理过程。
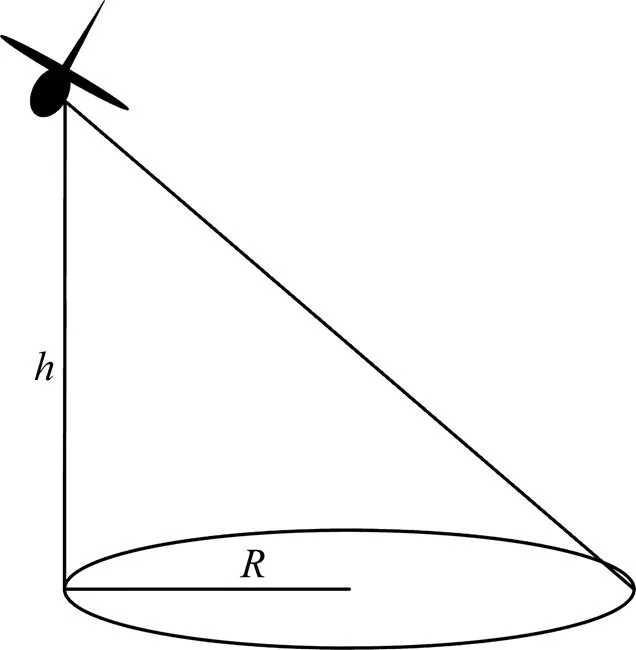
图4 搜索和跟踪航线在地面投影示意图
根据UAV的空速、转弯半径、转弯速率和转弯中心点定义1个无显著特点的UAV运动轨迹,一组特定的参数对应着1个行为模态的运动轨迹,要使2个行为模态的运动轨迹稳定而平滑的过渡,就需要对其运动轨迹所对应的这些参数进行平滑融合。在计算融合轨迹参数时,FCCs将被激活行为节点的状态值作为其轨迹参数的权重,通过向量加法对2个运动轨迹的参数进行加权求和,最终计算得到的加权值即为2个轨迹融合后的运动参数。
根据几何投影知识,UAV运动轨迹在地面投影的一般方程可以表示为
其中:参数,,和由图5所示定义;为UAV的空速;为航向角;为投影圆的中心点位置。
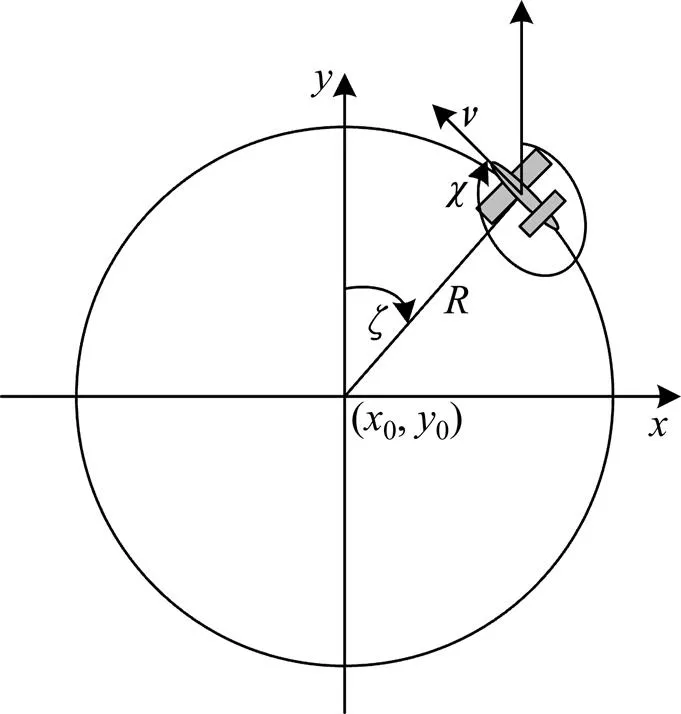
图5 飞行器一般运动轨迹在水平面的投影
若UAV的运动轨迹是线性的,即=0,轨迹切换的开始瞬间令,则可以根据下式计算得到
将式(13)对时间求导代入式(16),从而有

(17)
对式(17)进行求解,有
其中:

从而,
而从“搜索”到“跟踪目标”行为的航线是按从一个圆形轨道到另一个圆形轨道以切线过渡的方式切换的。这时,以及0和0的变化按照FCCs进行控制和调节的,而参数则需要FCCs协同被激活的行为节点2和3,根据式(13)~(16)联合求解。期望角速率可以根据上述求的方法求得,本文只给出最终结果:
需要说明的是:在“搜索”到“跟踪目标”行为过渡过程中,行为节点2和3状态值的激活程度是由节点1根据等级限制机制由多普勒雷达对目标的探测进行控制和调节。这些状态值又分别通过式(23)~(25)来决定行为过渡过程中轨迹参数的变化速率。
4 仿真与分析
通过1个搜索和跟踪任务场景的仿真来验证本文所设计的模糊认知控制器的性能。任务开始时,地面操作员向UAV发出“去搜索东北方向大约1 km的区域”,UAV按照预定的航路点进入搜索区域,进入搜索区域后,UAV保持在700 m的高度对该区域进行搜索。当在某个位置发现移动目标时,UAV就从该点降低高度和速度切换到跟踪目标轨道,在大约400 m的高度对该目标跟踪一段时间后,地面操作员“命令”UAV返回搜索轨道高度,沿着新的搜索轨道继续搜索下一个目标,直到燃料到达临界值,UAV自动终止搜索和跟踪任务,自动返回并着陆。
图6所示为UAV在执行该任务过程所历经航线。从图6可以看出:不同动作行为所对应的航线之间的切换是连续而且光滑的。
图7所示为从“进入搜索区域”行为向“搜索”行为过渡时UAV的航向和转弯角之间的关系。从图7可知:虽然UAV的朝向和转弯角相同,但当UAV开始向搜索行为过渡时,其朝向比转弯角有90°的相位超前。这个结果也是所期望的,因为UAV在刚开始向搜索行为过渡时,其轨迹过渡点的转弯角0°,而此时机头的朝向正好指向西,即270°,因此,两者之间刚好会产生90°的相位差。
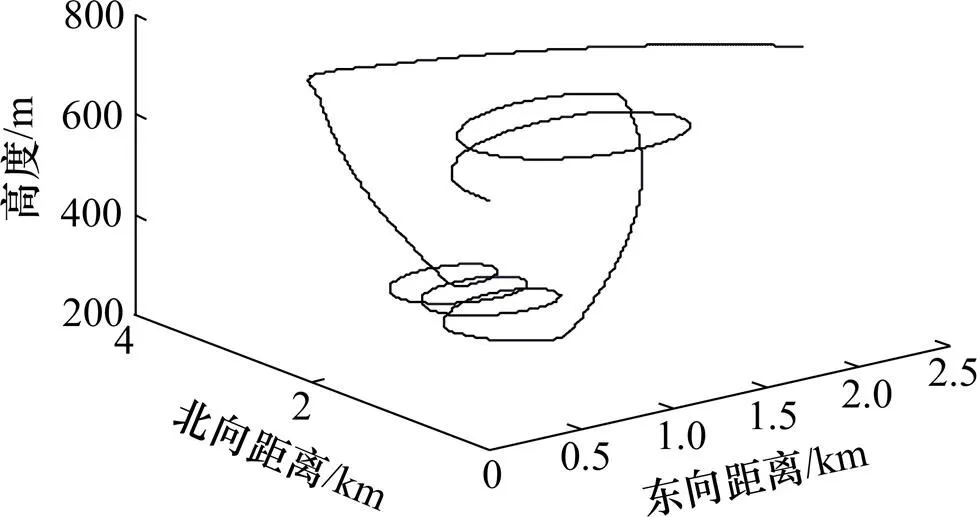
图6 搜索和跟踪任务的航线
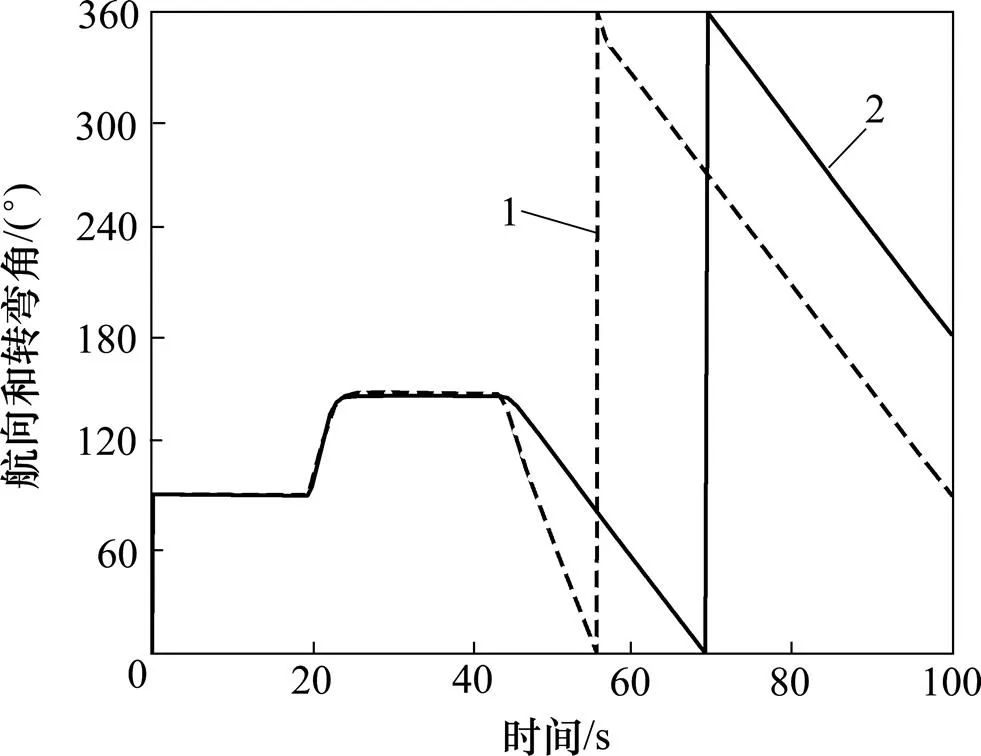
1—航向角;2—转弯角
图8所示为FCMs在整个仿真过程中UAV行为类节点状态值的迭代结果。从图8可以明显看到:各行为节点状态值的变化过程符合无人机的搜索和跟踪任务场景。需要指出的是在整个搜索和跟踪的过程中,地面操作员只需下达“去搜索这片区域”命令,或者当UAV完成跟踪某个目标后下达“停止跟踪这个目标”命令,其他所有动作和行为均通过FCCs处理由UAV自动完成,因此,可以极大减少地面操作员的控制操作。
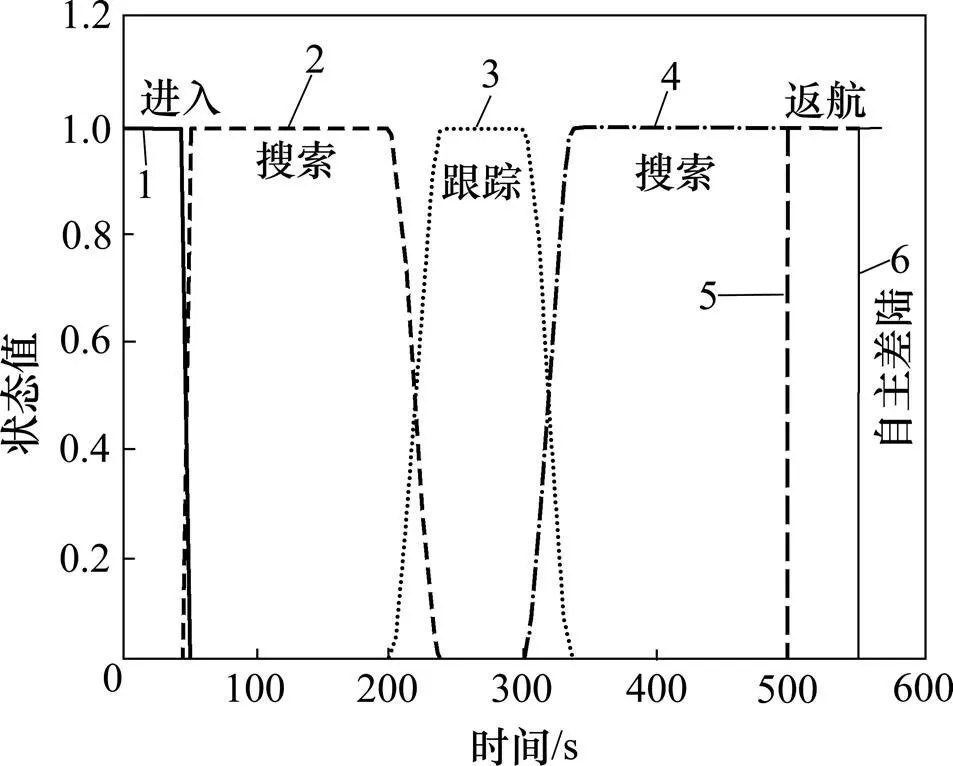
1—C1;2—C2;3—C3;4—C4;5—C5;6—C6
5 结论
1) 采用模糊认知图方法针对无人机的搜索和跟踪问题中提出了模糊认知控制器的设计思想,FCMs为智能控制器的设计提供了一个很好的框架结构,给出了一种类似人类用于决策和处理问题的具有很大弹性的概念获取方法。
2) 结合专家知识给出了无人机搜索和跟踪的FCMs模型,根据FCMs的推理机制设计了用于协调和处理无人机执行搜索和跟踪任务的模糊认知控制器,通过模糊认知控制器对搜索和跟踪行为节点的协同和处理,从而可以使不同任务航线稳定而平滑地切换。当采用基本事件节点控制和调节行为的过渡时,模糊认知控制器起到了本质的行为协同作用,通过理论分析和仿真,基本事件节点或者外部事件的改变可以使UAV产生一系列实实在在、可以感觉到行为和动作的变化。
3) 本文提出的模糊认知控制器的设计方法应该也可以用于多无人机协同、无人机协同攻击甚至无人机安全等更复杂的无人机应用场景,这有待进一步研究和验证。
[1] Office of the Secretary of Defense. Unmanned aircraft systems roadmap 2005-2030[R]. Washington DC: Office of the Secretary of Defense, Department of Defense, 2005: 1−31.
[2] Per S, Jonas N, Rickard B, et al. Path and sensor planning framework applicable to UAV surveillance with EO/IR sensors[R]. Stockholm: FOI-Swedish Defence Research Agency, 2005: 16−28.
[3] Magnus L. Survey of search and secure algorithms for surveillance UGVs[R]. Stockholm: FOI-Swedish Defence Research Agency, 2007: 21−35.
[4] LI Xia, WEI Ruixuan, WANG Zhike. Three-dimension path planning for UAV using improved A* algorithm in complicated threat environment[J]. High Technology Letters, 2011, 17(1): 13−18.
[5] Dirafzoon A, Salehizadeh S, Emrani S, et al. Coverage control for mobile sensing robots in unknown environments using neural network[C]// Proceedings of the IEEE International Symposium on Intelligent Control. Yokohama: International Academic Publishers, 2010: 1482−1487.
[6] ZHU Qingbao, HU Jun, CAI Wenbin, et al. A new robot navigation algorithm for dynamic unknown environments based on dynamic path re-computation and an improved scout ant algorithm[J]. Applied Soft Computing, 2011, 11(8): 4667−4676.
[7] 彭辉, 沈林成, 朱华勇. 基于分布式模型预测控制的多UAV协同区域搜索[J]. 航空学报, 2010, 31(3): 593−601. PENG Hui, SHEN Lincheng, ZHU Huayong. Multiple UAV cooperative area search based on distributed model predictive control[J]. Acta Aeronautica et Astronautica Sinica, 2010, 31(3): 593−601.
[8] Elpiniki I P, Jose L S, A review of fuzzy cognitive maps research during the last decade[J]. IEEE Transactions on Fuzzy Systems, 2013, 21(1): 66−78.
[9] Seyed K G, Ali A G. Action selection in robots based on learning fuzzy cognitive map[C]// Proceedings of the 2006 IEEE International Conference on Industrial Informatics. Singapore: International Academic Publishers, 2006: 731−736.
[10] Vaščák J. Approaches in adaptation of fuzzy cognitive maps for navigation purposes[C]// Proceedings of the SAMI 2010-8th IEEE International Symposium on Applied Machine Intelligence and Informatics. Slovakia:International Academic Publishers, 2010: 28−30.
[11] Pozna C, Troester F, Precup R E, et al. On the design of an obstacle avoiding trajectory: Method and simulation[J]. Mathematics and Computers in Simulation, Elsevier Science, 2009, 79(7): 2211−2226.
[12] 陈军, 高晓光, 丁琳. 模糊认知图在预警机燃油管理中的应用[J]. 系统工程与电子技术, 2008, 30(9): 1717−1720. CHEN Jun, GAO Xiaoguang, DING Lin. Application of fuzzy cognitive maps in fuel management of airborne warning and control systems[J]. Systems Engineering and Electronics, 2008, 30(9): 1717−1720.
[13] Kosko B. Fuzzy cognitive maps[J]. International Journal of Man-Machine Studies, 1986, 24(1): 65−75.
[14] Zadeh L A. Fuzzy sets[J]. Information and Control, 1965, 8(3): 338−353.
[15] Axelrad R. Structure of decision: The congnitive maps of political elites[M]. Princeton: Princeton University Press, 1976: 16−22.
[16] Hanafizadeh P, Aliehyaei R. The application of fuzzy cognitive map in soft system methodology[J]. Systemic Practice and Action Research, 2011, 24(4): 325−354.
[17] Zhou S, Liu Z Q. Fuzzy causal networks: general model, inference, and convergence[J]. IEEE Transactions on Fuzzy Systems, 2006, 14(3): 412−420.
[18] Wojciech S, Witold P, Lukasz A K. Learning of fuzzy cognitive maps using density estimate[J]. IEEE Transactions on Systems, Man, and Cybernetics-Part B: Cybernetics, 2012, 42(3): 900−912.
(编辑 罗金花)
Design of fuzzy cognitive controllers for unmanned aerial vehicle searching and tracking purposes
CUI Junhui1, 2, WEI Ruixuan1, ZHANG Xiaoqian3, QI Xiaoming1
(1. College of Aeronautics and Astronautics Engineering, Air Force Engineering University, Xi’an 710038, China;2. 69220 PLA Troops, Aksu 842000, China;3. Staffroom 402, Second Artillery Engineering University, Xi’an 710025, China)
Searching and target-tracking is a very important problem for unmanned aerial vehicle application. A kind of fuzzy cognitive controller based on fuzzy cognitive map theory was designed. The fuzzy cognitive controller governed and managed behavior coordination when pacing nodes were used to regulate behavior transitions. Meanwhile, transitions of the unmanned aerial vehicle flying trajectories were continuous and smooth from one behavior mode to another, and just by using a simple instruction, an operator was able to make upper semantic based interaction between man and UAV. As soon as the instruction was issued all the other actions taken by the UAV were autonomous, and managed by the fuzzy cognitive controllers. The results show that the designed fuzzy cognitive controllers may coordinate the behaviors of the mission scenario automatically and release the ground operator from complicated workload.
unmanned aerial vehicle; searching; target following; fuzzy cognitive maps; motion trajectory
10.11817/j.issn.1672-7207.2015.09.017
V249
A
1672−7207(2015)09−3279−08
2014−12−06;
2015−02−10
国家自然科学基金资助项目(61105012);航空科学基金资助项目(20135896027);中国博士后科学基金资助项目 (2012M512149) (Project(61105012) supported by the National Natural Science Foundation of China; Project(20135896027) supported by the Aeronautical Science Foundation of China; Project(2012M512149) supported by China Postdoctoral Science Foundation)
魏瑞轩,教授,博士生导师,从事无人机自主控制研究;E-mail: rxwei369@sohu.com
猜你喜欢
质量与标准化(2022年2期)2023-01-09
军事文摘(2022年13期)2022-08-27
小哥白尼(神奇星球)(2021年12期)2021-03-08
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
当代旅游(2019年3期)2019-09-19
现代装饰(2018年5期)2018-05-26
科学与财富(2017年24期)2017-09-06
中国三峡(2017年2期)2017-06-09
太空探索(2016年5期)2016-07-12
