
Vibration Feature Fusion for State Evaluation of Machinery
2015-12-20 09:14:12LIKangLINXiliang林习良HUXiangjiang胡湘江CAIZigang蔡自刚
关键词:湘江
LI Kang(李 康),LIN Xiliang(林习良),HU Xiangjiang(胡湘江),CAI Zigang(蔡自刚)
1Joint Lab of Flight Vehicle Ocean-Based Measurement and Control,China Satellite Maritime Tracking and Control Department,Jiangyin 214431,China
2School of Mechanical Engineering,Xi'an Jiaotong University,Xi'an 710049,China
Introduction
In order to inspect states of mechanical equipments,one single feature of vibration signals is usually selected as state parameter.For example,Shao et al.[1]adopted rootmean-square (RMS)value and Kurtosis value as state parameters.Nagi et al.[2]took average amplitude of failure frequency and its six-step harmonic as state parameter.However,further research discovers that single feature is only effective for certain phase and certain failure mode.It means that a given feature behaves differently for different failure modes and different features behave differently at certain condition.An excellent state parameter should capture performance change of machinery in different phases[3-4].To overcome the disadvantages of single feature,state parameter construction based on feature fusion technology was researched[4-6].Because that failure mode and failure vibration are hard to obtain in application,while the self-organizing map(SOM)[7-8]is an unsupervised and emulative algorithm,feature fusion method based on SOM is researched as the emphasis in this paper.
Section 1introduces the principle of the SOM.Feature fusion method based on SOM is presented in section 2.Section 3 designs an experimental flat and analyzes experimental results.Section 4concludes this paper.
1 Principle of SOM
Brain neurology shows that nerve cells at different area in brain have different functions.The cells are sensitive for different information feature,forming different paths.In the brain,the input signals of nerve cell partly come from feeling apparatus and partly come from feedback of cells in the same area.Information exchanges of nerve cells have the characteristics that adjacent cells inspire each other and farther cells restrain each other or inspire faintly.The self-organizing characteristics of the brain can be discovered from the phenomena that response of the nerve cells for certain input is tactic.SOM is presented according to such self-organizing characteristics of brain.The two-dimensional dot-matrix structure of SOM imitates structure of nerve cells in brain.The SOM imitates functions of clustering,self-organizing and selfstudying by reciprocities between different cells.Therefore,the SOM is an unsupervised forward network.It captures important feature or inherent law of data and sorts input vectors to different classes.What's more,the SOM can map arbitrary multidimensional input data to plane or line,beseeming analysis of multidimensional data.
The structure of SOM is shown in Fig.1.The SOM contains input layer and output layer.Number of nerve cells for the input layer is n,and the output layer is the plane dot-matrix with M =m2cells.Topology of the output layer can be hexagon,gridding,and so on.Coefficients connect cells between input and output layers and connect cells in the output layer.We can see that there exist two kinds of coefficients which separately reflect response intensity for input and mutual action between cells of the output layer.
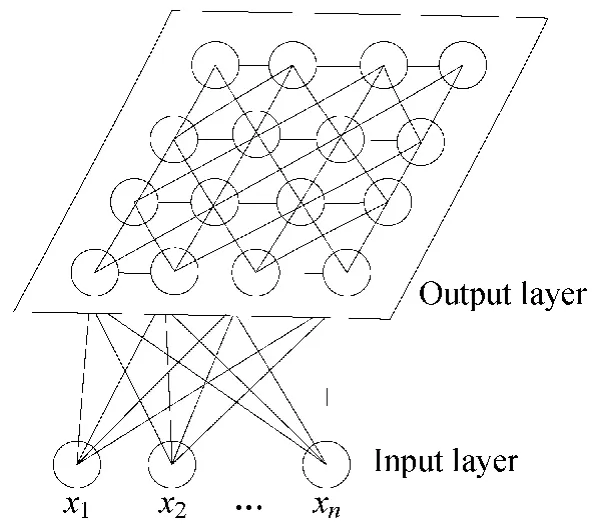
Fig.1 Structure of SOM
The learning algorithm of SOM is shown in Fig.2.

Fig.2 Learning algorithm of SOM
Supposing that the input is n dimensional vector x =(x1,x2,…,xn)Tand the output has M nodes,learning algorithm of SOM is as follows.
(1)Network initialization
Set the coefficients between input layer and output layer as random.
(2)Vector input
Normalize the input vector x =(x1,x2,…,xn)Tand provide the vector to input vector of SOM.

(3)Euclidean distance calculation
Calculate the Euclidean distance between input vector and coefficients in step (1).The distance between input vector and the j-th coefficient can be calculated as follows.

where wijdenotes the coefficient between the i-th input nerve cell and the j-th output nerve cell.
(4)The cell which has the minimum Euclidean distance with input vector is victorious nerve cell.
Mark the victorious nerve cell as j*,j =1,2,…,M and present its neighbor muster.
(5)Update coefficients of the victorious nerve cell and its neighbor muster
Update coefficients of the victorious nerve cell and its neighbor muster using the following formula.

whereηis learning efficiency,and 0<η<1.h(j,j*)is the neighbor muster of victorious nerve cell which usually has Gauss form.

whereσ2reflects neighbor area which deflates along with learning.Therefore,h(j,j*)is wide at beginning and getting narrow along with SOM learning.
(6)Check if the learning satisfy request or not
If the learning process satisfy request,end the learning.Otherwise,return to step(2)and keep on learning.In the SOM,we can see that coefficients of the victorious nerve cell and its neighbor muster are nearby the input vector.At beginning,h(j,j*)is wide and the map is cursory.However,h(j,j*)is narrower along with learning and cells of neighbor muster tail off.Therefore,resolving power of space is enhanced.
2 Vibration Feature Fusion Based on SOM
2.1 Fusion algorithm
The SOM can classify input data according to Euclidean distance between coefficients and input vector.Different classes denote different states of machinery.The state change can be described by moving contrail of victorious nerve cell.In the normal state,the victorious nerve cell clusters in a certain area.When the machine scathes,the victorious nerve cell is out of the area of normal state.Out magnitude depends on failure mode and failure extend.Therefore,the failure extend can be assessed by the minimum quantization error (MQE)[4].The assessing process is as follows.
(1)Normal state features train the SOM,obtaining coefficients of normal state.
(2)Calculate Euclidean distance between features of vibration and all coefficients of normal state.
(3)The best matching unit(BMU)is the cell whose coefficient distance is the shortest.And the shortest distance is the fusion result and a kind of state parameter.
Essentially,the distance between BMU and input vector is the distance between current state and normal state.And the distance is defined as MQEas follows.

where D is the input feature vector,and mBMUis the coefficient of BMU.
2.2 Trend information extract based on wavelet packet
In the process of vibration collection,feature extraction and feature fusion,data disturbing inevitably occurs.Disorder of feature fusion results exists.Some literature adopts the step of denoising for vibration signals[9],but the disorder of results for feature fusion howbeit exists.One of the reasons is that the vibration signals interfuse random noise when working.Another reason is that steps of feature extraction and feature fusion interfuse data noise.Some literature adopts method of slippage average to eliminate disorder[10], but the method easily brings end-point phenomena and state contrail of machinery leads or lags compared with real state contrail.It's very dangerous when sampling alternation is great.
Considering that trend information is signal with low frequency while data disturbing is signal with high frequency.The MQE,seen as a signal and wavelet packet[11-12],is used to separate trend information and data disturbing.The MQE is decomposed by wavelet packet first and the low-frequency band is the trend information of MQE.The trend information of MQE is the final state parameter.
The feature fusion method based on SOM is shown in Fig.3.
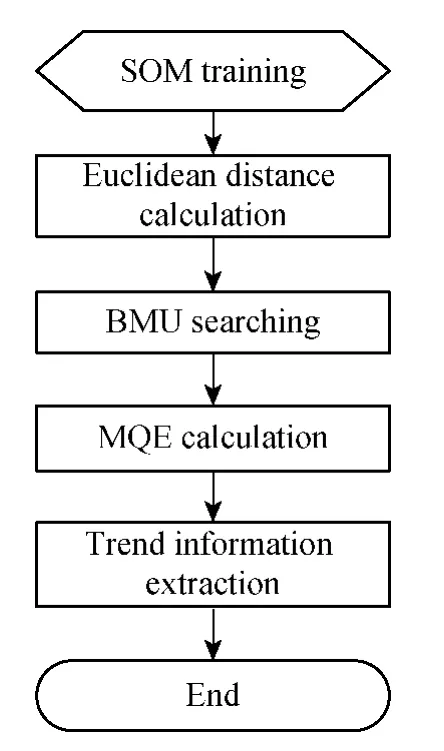
Fig.3 Feature fusion algorithm based on SOM
3 Experimental Results
3.1 Experimental flat construction and vibration signals collection
Experimental flat is designed for bearing accelerating fatigue in this paper.The flat consists of lathe bed,main body,drive system,load system,lubricating system,PID controlling system,wiring controlling system and computer system.The flat is shown in Fig.4.

Fig.4 Experimental flat
The flat uses computer to simulate working condition of bearing,such as load,rotate speed and temperature,fitting failure simulation or accelerating fatigue of bearing whose inner-diameter is 80-150mm.
The main body of the flat includes radial loading,electricity axis,coupler,brace shafting,experimental bearing,axes loading and data collection system.The main body adopts splitting structure to make teardown easy.
The coupler adopts cantilever framework,fixing experimental bearing to cantilever point of brace shafting.Load mode is the hydraulic and proportional loading.The main body is shown in Fig.5.

Fig.5 The main body of the experimental flat
In the experiment,the alternator drives the bearing through the coupler.The rotating speed is 6 000r/min.Radial load is 11kN and axes load is 2kN.Type of the experimental bearing is H7018C.Lance vibration sensors are used to collect radial vibration,the sampling frequency is 20 kHz,the sampling length is 32 786,and the sampling alternation is 5 min.In the 70th hour,the experimental bearing damages lightly.In the 86th hour after the experiment beginning,the experimental bearing invalidates.
3.2 Feature fusion results based on SOM
As we all know,RMS values of vibration and its envelope are not sensitive for forepart damage while their stability is well;however,Kurtosis values of vibration and its envelope are sensitive for pulse-forepart damage but their stability is bad;waveform parameter values of vibration and its envelope are not sensitive for pulse-forepart damage but they reflect the whole intensity of vibration well[13].Therefore,each kind of feature has his strong point while each feature can not reflect state of mechanical equipment in different stage effectively.Thus, RMS, Kurtosis and waveform parameter of vibration signals of 0-25hand their envelopes are used to train the SOM in the experiment.Then,MQE values are continually calculated by inputting the six features of vibration signal in whole life to SOM trained.At last,“db5”wavelet packet is used to decompose MQE curve into five frequency bands,and the first band with the lowest frequency is the final state parameter.The experimental process is shown in Fig.6.The experimental results are shown in Fig.7.

Fig.6 The experimental process
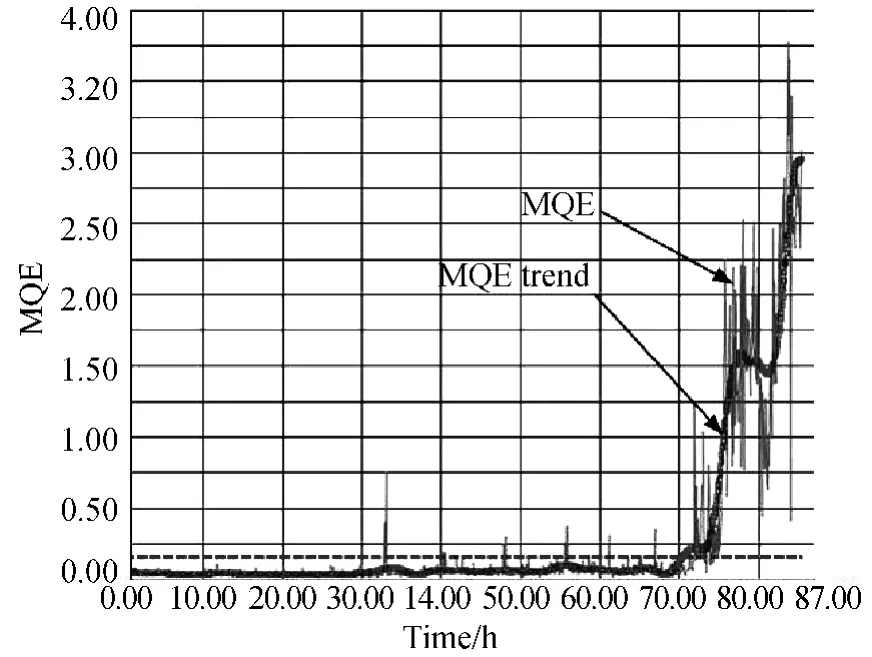
Fig.7 Results of feature fusion based on SOM
We can see from Fig.7that at the time of 70h,MQE rises abruptly,detecting the state change of experimental bearing.After that,MQE rises astatically,implying that desquamating of the bearing is getting serious.
At the time of 82 h, MQE rises rapidly and exponentially,implying that the bearing comes into invalidation stage.MQE is sensitive for both forepart damage and afternoon damage,and the stability is well.Therefore,the MQE reflects state of mechanical equipment in different stages effectively.
4 Conclusions
To overcome the problem that differentkinds of vibration features can not reflect state of machinery in different stages effectively,a vibration feature fusion method based on SOM is presented in this paper.Wavelet packet is used to extract trend information of MQE curve,enhancing state differentiating.Experimental flat is designed for bearing accelerating fatigue.And experimental results are shown to validate the effectiveness of feature fusion based on SOM.
[1]Shao Y,Nezu K.Prognosis of Remaining Bearing Life Using Neural Network [J].Journal of Systerms and Control Engineering,2000,214(3):217-230.
[2]Nagi Z G,Mark L A.Neural Network Degradation Model for Computing and Updating Residual Life Distributions[J].IEEE Transactions on Automation Science and Engineering,2008,5(1):154-163.
[3]Shen Z J,Chen X F,He Z J.Remaining Life Predictions of Rolling Bearing Based on Relative Features and Multivariable Support Vector Machine [J].Journal of Mechanical Engineering,2013,49(2):183-189.
[4]Qiu H,Lee J,Lin J,et al.Robust Performance Degradation Assessment Methods for Enhanced Rolling Element Bearing Prognostics[J].Advanced Engineering Informatics,2003,17(3/4):127-140.
[5]Zhang L J,Liu B,Zhang B,et al.Feature Extraction Method of Bearing Performance Degradation Based on Time-Frequency Image Fusion [J].Journal of Mechanical Engineering,2013,49(22):53-58.
[6]Liao L X,Lee J.A Novel Method for Machine Performance Degradation Assessment Based on Fixed Cycle Features Test[J].Journal of Sound and Vibration,2009,326(3/4/5):894-908.
[7]Bishop C M.Neural Networks for Pattern Recognition[M].UK:Oxford University Press,1995:91-108.
[8]Jiang W J.Fault Diagnosis of Vehicle Rolling Bearing Based on Wavelet Packet and SOM Neural Network[J].Machine Design and Research,2012,28(6):70-73.
[9]Duan C D.Research on Fault Diagnostics Based on Second Generation Wavelet[M].Xi'an:Xi'an Jiaotong University,2005.(in Chinese)
[10]Miao X W.Prognosis of Remaining Life for Aero Engine Main Bearing[M].Beijing:Beihang University,2009.(in Chinese)
[11]Ji Y B.Frequency-Order of Wavelet Packet[J].Journal of Vibration and Shock,2005,24(3):96-110.(in Chinese)
[12]Wu W B,Wu W M.Diagnosis of Flow Control Valve Using Wavelet Packet [J].Journal of Jinggangshan University,2011,32(1):97-99.(in Chinese)
[13]He Z J.Theories and Application of Machinery Fault Diagnostics[M].Beijing:High Education Press,2009:34-36.(in Chinese)
猜你喜欢
心声歌刊(2021年1期)2021-07-22 07:52:18
歌海(2021年2期)2021-06-22 02:25:59
小学生学习指导(高年级)(2020年12期)2021-01-07 01:16:42
音乐教育与创作(2020年11期)2020-11-17 02:43:22
文史春秋(2019年7期)2019-09-10 08:36:50
文史春秋(2019年7期)2019-09-10 08:36:44
音乐教育与创作(2019年9期)2019-05-23 09:01:38
音乐教育与创作(2019年7期)2019-05-19 11:38:38
歌海(2019年6期)2019-02-22 12:23:31
名作欣赏(2017年25期)2017-11-06 01:40:12
 Journal of Donghua University(English Edition)2015年2期
Journal of Donghua University(English Edition)2015年2期
- Journal of Donghua University(English Edition)的其它文章
- Two Types of Adaptive Generalized Synchronization of Chaotic Systems
- Exploring Mobile LearningTools Used in Autonomous Learning:a Perspective from China
- Optimal Packet Size of Underwater Sensor Networks
- A Fast Bayesian Evaluation Algorithm Based on the Second Categoryof Maximum Likelihood
- Dynamic Simulation Analysis of the Flexible SwapDevice
- Design of Control and Monitor System Applied in Artificial Grass Tufting Machine