基于改进D-S决策融合的航电设备故障诊断
2015-12-20 06:58牛强军黄家成胡秀洁宋家友
计算机工程与设计 2015年8期
牛强军,黄家成,胡秀洁,宋家友
(1.空军第一航空学院 航空电子工程系,河南 信阳464000;2.郑州大学 信息工程学院,河南 郑州450001)
0 引 言
随着科技的发展,航电设备变得越来越复杂,其故障诊断不能仅靠单一特征量和诊断方法。信息融合可以将来自不同的测量信息进行融合处理,判定故障,其诊断识别能力优于单一模型[1]。D-S证据理论[2]作为信息融合的主要方法,其基本概率赋值的获取是难点[3]。本文将模糊神经网络 (fuzzy-neural network,FNN)[4]诊断方法作为信息融合的局部方法,利用其诊断结果进行概率赋值的转化。针对D-S证据组合规则无法解决高冲突证据现象的问题,同时考虑不同来源证据判断故障模式的可靠性差异,在分析现有的规则方法基础之上[5-7],提出一种两级修改证据源方法,并与传统证据理论方法、文献 [6]方法进行比较,以提高诊断的准确率和精确度。
1 信息融合故障诊断模型
图1所示是信息融合故障诊断框架。采用基于模糊神经网络和D-S证据信息融合故障模型。
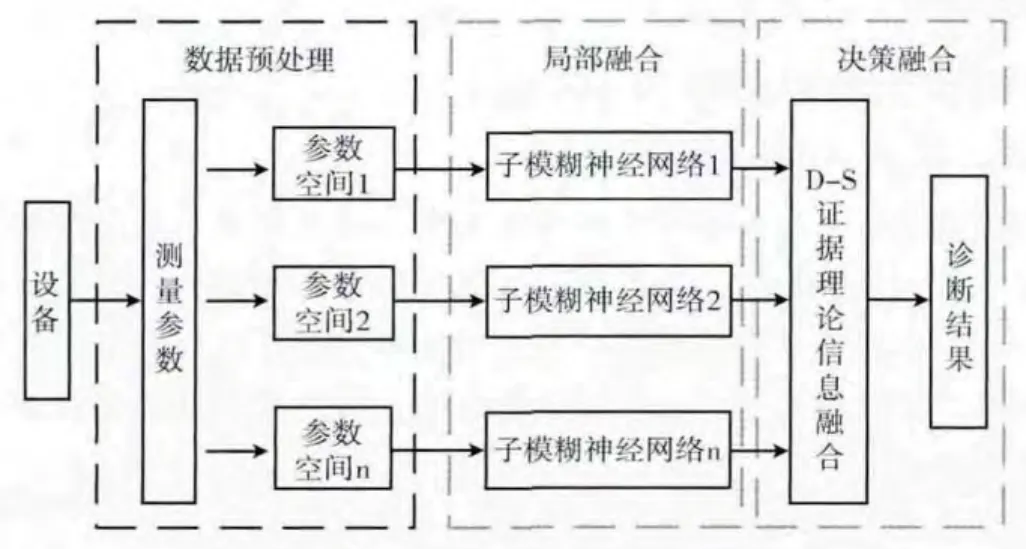
图1 信息融合故障诊断框架
由数据采集层和检测设备测量设备中诸如频率、功率、电压、波形等电量信号,并将其分为若干个测量参数子空间作为局部融合的输入。局部融合采用并行子模糊神经网络结构,对设备不同故障模式进行初步诊断[8]。

2 D-S证据理论改进方法
证据理论适合处理低冲突数据情况,但在证据高冲突时,组合结果会发生与常理不符的情况,例如文献 [9]中的实例,结果判定与直觉相违背。这是因为K →1,冲突系数过高,一个证据对m(a)和m(c)的否定抹杀了另一个证据对其高的支持度。
在故障诊断中,不同特征子级对同一故障的诊断结果往往差异较大,因此,对证据融合之前需要充分考虑每个证据的重要程度,即加权系数。通过加权系数的调整,对引起冲突的干扰证据使其作用减小。
由此,本文提出了一种两级修改证据源的方法。第一级针对证据源的获取,将局部诊断产生的正确度作为加权系数引入证据基本概率赋值获取。第二级修改针对于冲突证据的处理,引入贴近度加权系数修改证据源。
(1)正确度—加权系数
设故障识别框架为Θ= {A1,A2,…An},即设备的n种系统模式,融合的关键在于各证据体对每种模式的可信度分配,即基本概率赋值。
由模式识别知识可知,若模式x 和y 相似,就说它们的特征相近。设x,y 包含的特征有m 个,定义下式表示两个模式的欧氏距离[10],即

设outij为第i个分类器第j 个故障模式的识别输出,Aj为识别框架中元素所对应证据体的标准特征向量,则第i个网络的第j 个模式与识别框架中标准模式的欧式距离为

由于各FNN 样本输入不同以及不同故障在系统的不同部位体现程度强弱的差异,因此每个FNN 分类器对不同故障模式的识别能力也不同。为了提高融合效率,将此信息加入融合中非常重要。采用各网路识别阶段样本正确率衡量可靠性系数,设第i个网络对第k 个已知故障模式为βik,从距离函数到基本概率赋值函数的映射R →[0,1]是一个非线性映射过程。则证据i对故障j 的基本概率赋值及不确定性分别由以下两式获得

式中:N 表示故障模式数目。对基本概率赋值进行归一化处理,以满足定义的要求。
(2)贴近度—加权系数
贴近度用来度量两个证据之间的相关性,如果证据间贴近度越大,则表示两个证据相关性越大,对同一命题的支持度越相近,那么证据之间的冲突较低;反之两个证据间的冲突较大。常用的贴近度法有格贴近度法、海明贴近度法、欧几里得贴近度法、最大最小贴近度法,算术平均贴近度法。经实验验证,最大最小贴近度法可以使融合后有更高精度的概率赋值。
设一识别框架U= {U1,U2,…,Uk,…Un},有N个证据E1,E2,EN,对应的基本概率赋值函数为m1,m2,…mN,对于Uk,两条证据之间的基本概率指派为mi(uk),mj(uk)。
最大最小贴近度
但t(Ei,Ej)只表示两个证据间的贴近度,不能反映证据Ei与其它所有证据的贴近度。证据Ei与其它证据的真实贴近程度应由t(Ei,E1)…t(Ei,EN)共同体现,即


式中:S(Ei)值越大,表示此条证据真实性越高,反之,则越低,很可能为干扰证据。
将融合系统中各个证据的S(Ei)进行排序,可以得到每个证据在融合系统的重要程度,若满足

则称EC为融合系统中最关键的证据,其它证据称为非关键证据。
定义各证据相对于最关键证据的证据权为各个证据在融合系统中所占有的权重系数,用ωi表示

(3)加权后的证据合成
式(8)得到的各证据的权值系数组成证据源的权值向量W,W = (w1,w2,…,wn)。它反映出证据在合成的过程中的重要程度及对合成结果影响的程度。重新分配的基本概率赋值为

将调整的概率函数代入合成公式,计算融合结果
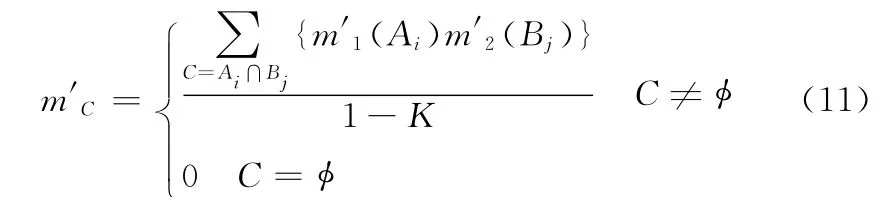
其中

改进后算法见图2。δ表示冲突判断的阈值,选择0.65。
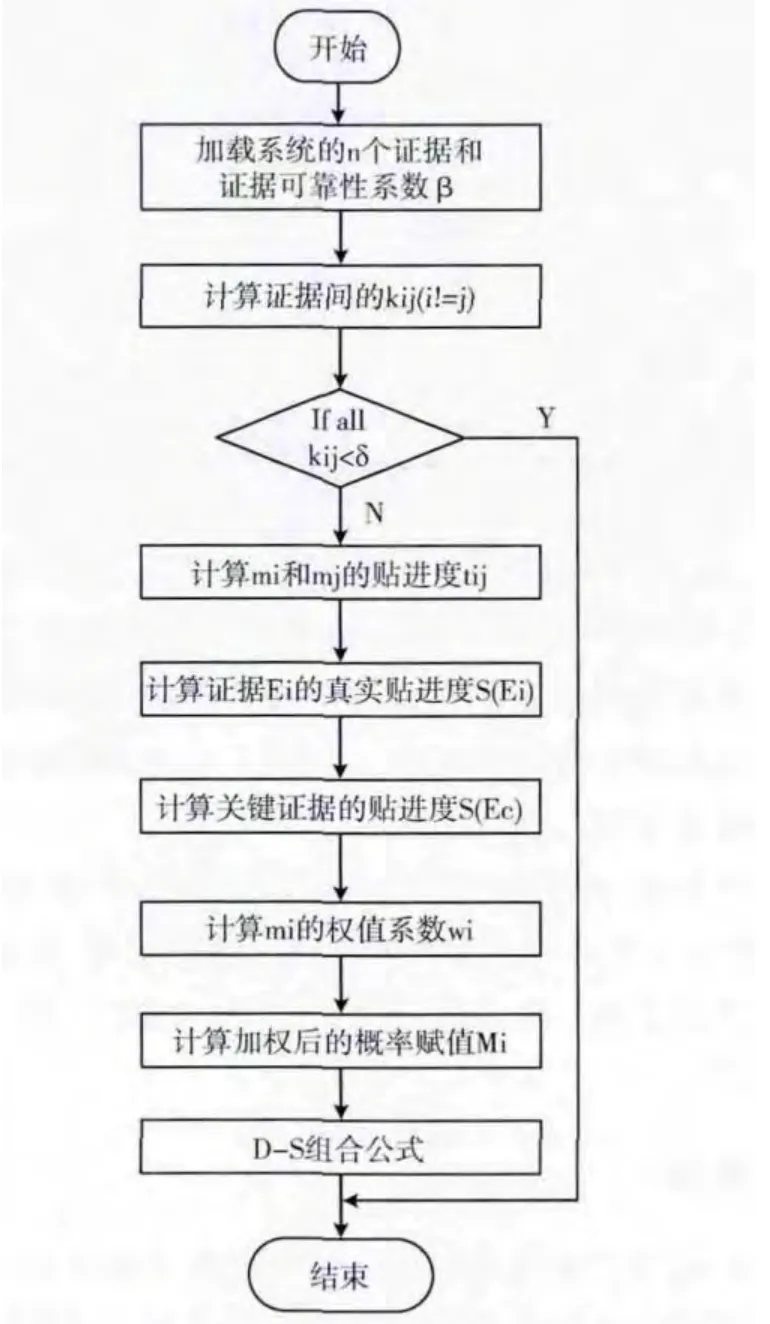
图2 改进融合方法流程
3 实验分析
以电台模块级诊断为例,机载超短波电台电路模块包括主接收机、救生接收机、频率合成器、发射机和电源。电源模块诊断单独进行,在电源无故障情况下,再对其它模块进行诊断。工作模式有4 种,即主收、双收、定向和救生。以 “主收”工作方式为例,此时救生接收机不工作。
融合诊断系统决策结果的评价指标有两个,即结果的准确率和结果的精确度。
3.1 局部故障诊断
系统模式分为正常模式F1和故障模式。故障模式包括接收机故障F2、发射机故障F3、频率合成器故障F4。根据技术要求和专家经验,采用9个指标作为故障特征参数,建立3个子模糊神经网络分类器。射频接收幅度、主收灵敏度和发射功率为分类器1的输入;静燥灵敏度、发射调制度、射频发射幅度为分类器2 的输入;主收额定输出、发射自听信号、失锁信号为分类器3的输入。通过查阅收集的有关该型电台使用过程中的性能测试数据、故障数据,在各种模式下分别整理出50个样本,用于建立和测试各子模糊神经网络分类器,测试阶段每个分类器对各个故障的正确识别率及分类器的总体识别率见表1。
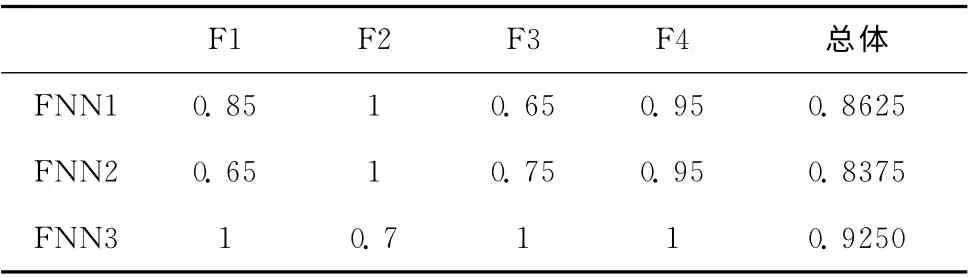
表1 分类器正确识别率
3.2 决策融合诊断
(1)诊断准确率对比
由表1中每个分类器对各个故障的正确识别率以及每个分类器输出结果按照两级修改证据源方法进行融合后的基本概率赋值计算,利用传统证据理论方法、文献 [6]方法以及本文方法进行仿真。表2列出3种方法的准确率对比。

表2 3种方法融合准确率对比
(2)诊断精确度对比
根据冲突系数的设定,正常证据和冲突证据使用不同的方法。下面从两种数据分析融合后的精确度。
1)正常证据的融合:正常证据融合采用传统证据理论方法,图3是故障模式2状态下单个正确体以及融合后的基本概率赋值。对比可知,经过融合,诊断的可信度增加,且融合证据多,可信度大。表3给出任意两组测试样本在单个证据体,即网络分类器下输出的基本概率赋值以及融合后的概率赋值。E1、E2、E3分别表示特征级子网络分类器。从表3中可以看出,仅利用单个证据体对故障进行识别时,得出的信任测度较低。
对于样本1数据,E1和E2融合后,F1状态的概率赋值变大,同时其它状态的概率赋值变小,不确定度降低。3个证据集融合后,F1的概率赋值继续增高,其它状态的概率赋值继续降低,不确定度由原来最高0.1056 降为0.0012。证明融合后故障诊断的可信度增加,状态间的不确定性降低,且证据集越多,故障诊断的确定性越大。
对于样本2数据,实际状态应为F3 模式,E2 判定错误。单独根据证据集,无法判定输出模式。经过E1 和E2融合,状态为F3,纠正了E2带来的错误诊断,但状态间的不确定性较大。经过3个证据集融合,F2的概率赋值继续增加,不确定性降低至0.001,判断状态为F3,与实际 相符。证明经过信息融合后,可修正一些证据体的错误判断,有效地解决了局部诊断出现的误判现象。
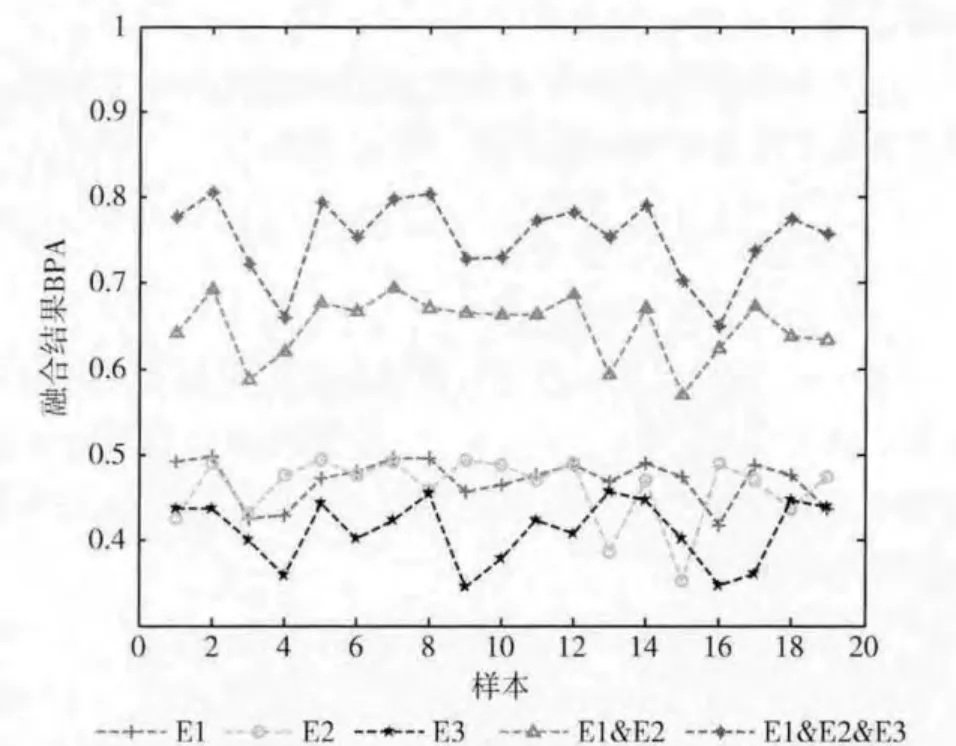
图3 单个证据体及融合后的BPA
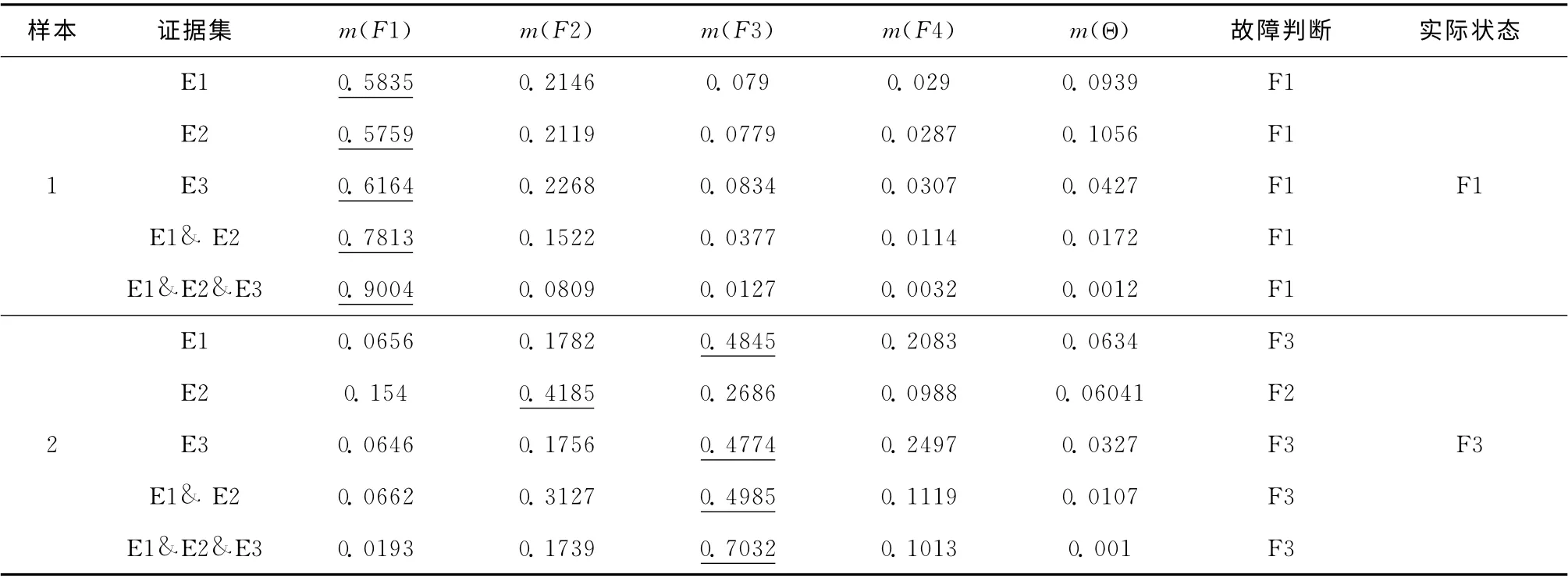
表3 单个证据体及融合后的基本概率分配
2)冲突证据的融合:冲突证据融合采用两级修改证据源方法,抽取一些测试样本,如图4绘出3种方法下融合后的基本概率赋值。
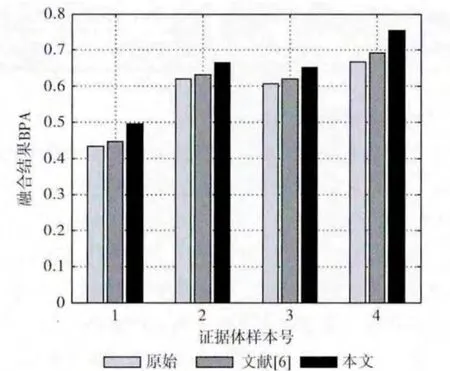
图4 3种方法融合结果BPA
表4为两个冲突样本在3种方法下融合后的基本概率分配。
对于样本1数据,传统证据理论方法和文献 [6]方法融合后故障判断为F2,与实际不符,判断出错。本文方法在3个证据融合后判断正确。证明了本文的两级证据理论方法的准确性高。
对于样本2 数据,传统证据理论在两个证据融合时,判断出错,3个证据融合判断正确,文献 [6]方法和本文方法都判断正确。且本文的判定结果精确度比其它两种方法的都高。
4 结束语
(1)将信息融合用于航电设备故障诊断研究中,提出基于模糊神经网络和证据理论的诊断模型,实验验证经融合后的故障识别能力优于单一FNN 分类器,表明信息融合故障诊断方法可以提高诊断的可靠性和准确性。
(2)针对冲突证据,提出一种两级修改证据源方法,能够充分利用各个证据信息,避免单一诊断模型带来的结果不一致以及误诊的现象;有效解决传统方法对冲突证据 失效问题,且诊断正确率和精确度均优于其它两种方法。
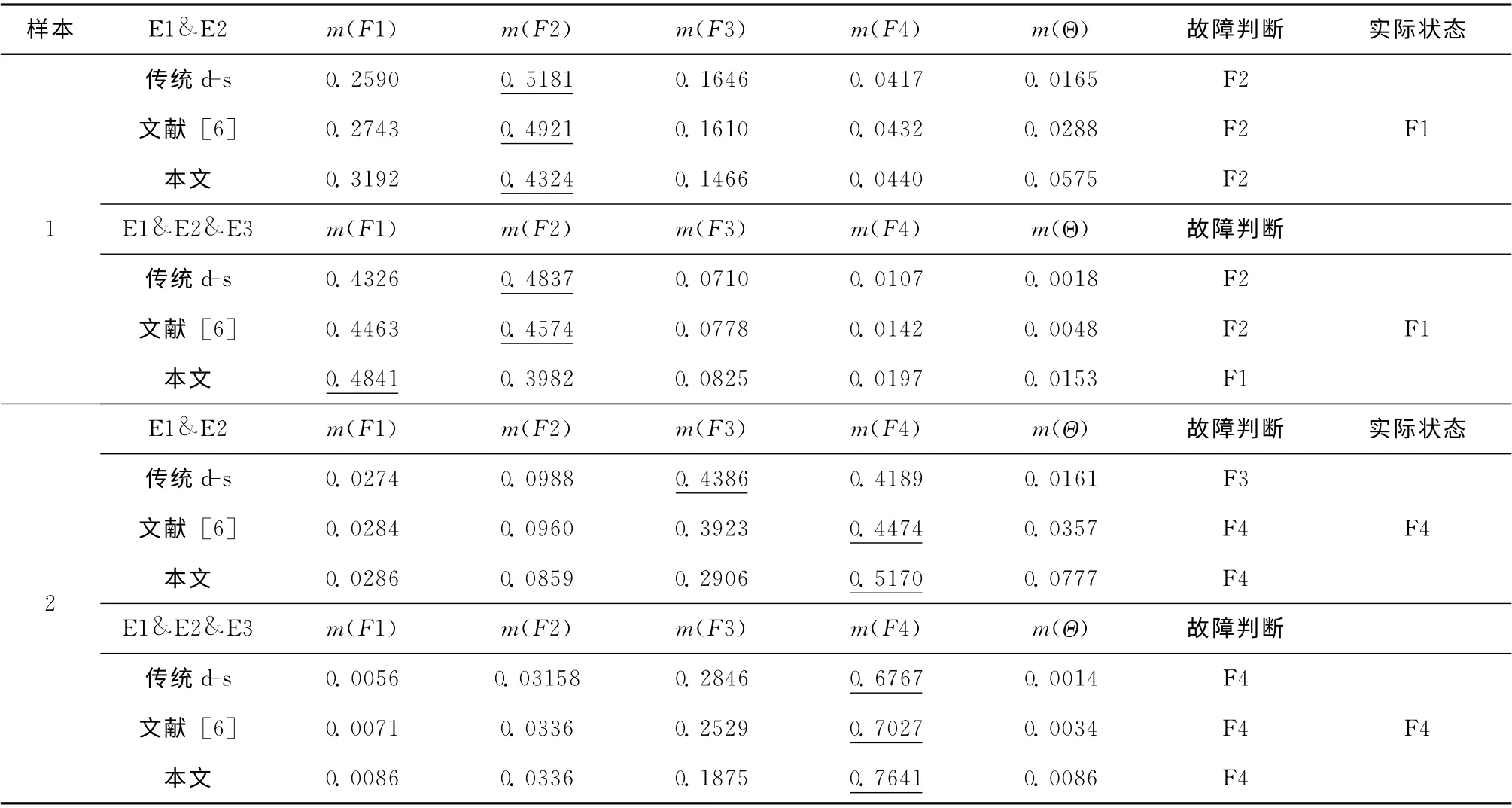
表4 3种方法下融合后的基本概率分配
[1]Han Minye,Zun Dingxiao.Applied scientific research and engineering developments for industry [J].Applied Mechanics and Materials,2013,385-386:601-604.
[2]Luo He,Yan Shanlin,Hu Xiaojia.Agent oriented intelligent fault diagnosis system using evidence theory [J].Expert Systems with Applications,2012,39 (3):2524-2531.
[3]Xu Chunmei,Zhang Hao.Study of fault diagnosis of D-S evidence theory based on neural network for turbine[J].Energy Procedia,2012,16:2027-2032.
[4]ZHOU Runjing.Fuzzy neural network design based on MATLAB and fuzzyTECH [M].Beijing:Publishing House of Electronics Industry,2010 (in Chinese). [周润景.基于MATLAB与fuzzyTECH 的模糊与神经网络设计 [M].北京:电子工业出版社,2010.]
[5]CHEN Weijun,JING Zhanrong,YUAN Fangfei,et al.Shortcoming of D-S evidence theory and its mathematic modification[J].Journal of North University of China (Natural Science Edition),2010,31 (2):161-168(in Chinese).[陈炜军,景占荣,袁芳菲,等.D-S证据理论的不足及其数学修正[J].中北大学学报(自然科学版),2010,31 (2):161-168.]
[6]LIU Haiyan,ZHAO Zonggui,LIU Xi.Combination of conflict evidences in D-S theory [J].Journal of University of Electronic Science and Technology of China,2008,37 (5):701-704 (in Chinese).[刘海燕,赵宗贵,刘熹.D-S证据理论中冲突证据的合成方法 [J].电子科技大学学报,2008,37(5):701-704.]
[7]JIANG Wen,PENG Jinye,DENG Yong.New representation method of evidential conflict [J].Systems Engineering and Electronics,2010,32 (3):562-565 (in Chinese).[蒋雯,彭进业,邓勇.一种新的证据冲突表示方法 [J].系统工程与电子技术,2010,32 (3):562-565.]
[8]HE Jianjun,ZHAO Rui.Hydroelectric generating sets fault diagnosis based on information fusion technology [J].Journal of Central South University,2007,38 (2):333-338 (in Chinese).[贺建军,赵蕊.基于信息融合技术的大型水轮发电机故障诊断 [J].中南大学学报,2007,38 (2):333-338.]
[9]SHI Chao,CHENG Yongmei.Combination method of conflict information from multi-sensor based on evidence conflict degree[J].Application Research of Computers,2011,28 (3):865-868 (in Chinese).[史超,程咏梅.基于证据冲突度的多传感器冲突信息组合方法 [J].计算机应用研究,2011,28 (3):865-868.]
[10]WU Yubin,ZHANG Hexin,LV Yongjia.Research of certain aircraft ground power fault diagnosis based on D-S evidence theory [J].Aerospace Control,2011,29 (6):79-83 (in Chinese).[吴玉彬,张合新,吕永佳.基于D-S证据理论的某飞行器地面电源故障诊断研究 [J].航天控制,2011,29(6):79-83.]
猜你喜欢
榆林学院学报(2022年4期)2022-08-02
一重技术(2021年5期)2022-01-18
计算机与生活(2018年8期)2018-08-15
光学精密工程(2016年4期)2016-11-07
光学精密工程(2016年3期)2016-11-07
理科考试研究·高中(2016年9期)2016-05-14
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28
电测与仪表(2014年15期)2014-04-04
振动、测试与诊断(2014年5期)2014-03-01
河南科技(2014年3期)2014-02-27