基于Hausdorff距离改进的ICP算法
2015-12-20 06:56郑晓璐潘广贞杨小青
计算机工程与设计 2015年9期
郑晓璐,潘广贞,杨 剑,杨小青
(中北大学 计算机与控制工程学院,山西 太原030051)
0 引 言
为了得到被测物体的完整数据模型,需要对多次测量的数据进行一个合适的坐标变换,将不同视角的点云数据变换到统一的坐标系内进行可视化操作,这就是点云的配准[1-4]。
Besl等提出了一种基于自由形态曲面的高层次配准方法[5],即 为 经 典 的 迭 代 最 近 点 (iterative closest point,ICP)算法。首先根据一定的准则确立对应点集P与Q,其中对应点对的个数为n。然后通过最小二乘法迭代计算最优的坐标变换,即旋转矩阵和平移矢量t,使得误差函数最小;随后DAI提出了一种使用曲率特征点和K-D 树寻找最近点的方法[6]。然而该些算法对点云没有进行预处理。之后国内外的许多学者对ICP进行了不同程度的研究和改进。随着三维扫描设备精度的提高,数据规模和配准精度也在提高,经典的ICP算法不能满足实时性的需求,因此本文在对各种ICP算法进行研究后,提出了一种基于Hausdorff距离处理点云的ICP 算法。在获得大量点云数据后,以数据点主曲率和Hausdorff距离[7]为依据,利用正态分布图将点云分为关键点和非关键点,关键点充分保留了点云的几何特征,用来进行配准,而非关键点作为几何特征不明显的点,为提高算法效率不予以配准。采用K-D 树[8]加速查找,利用最小二乘迭代计算最优的坐标变换,完成点云的配准。数据规模巨大的点云配准精度问题由此得到解决。
1 点云预处理
1.1 曲率计算
点云的曲率[9]是描述点云曲面几何特征的主要数学手段,曲率是在连续且二阶可导的曲面上定义的,没有拓扑结构,因此离散的三维点云不能直接计算曲率。在局部坐标系内拟合一张连续曲面来计算各点的曲率,常用到的曲率分别有高斯曲率、平均曲率和主曲率。
设(d)=du:dv 为曲面S:r=r(u:v)在P 点处的主方向,沿主方向的主曲率为Kn,则Kn满足

即Kn是二次方程的根,也就是方程K2n-2 HKn+K =0的根

则曲面S 的高斯曲率为

则曲面S 的平均曲率为

则主曲率

1.2 关键点选取
Hausdorff距离[10]是研究分形空间的一个重要的基本概念,是描述两组点集之间相似程度的一种度量,它是两个点集之间距离的一种定义形式:假设有两组集合A ={a1,a2,…ap},B ={b1,b2,…bq},则A,B 两点集之间Hausdorff距离定义为

其中,d(A,B)和d(B,A)分别表示集合A 到集合B 和集合B 到集合A 的单向Hausdorff距离,分别定义如下
其中, · 表示某种距离范数。
通过计算点与其邻域之内点之间Hausdorff距离作为依据,将点集P 分为关键点P′和非关键点P″(P′∪P″=P且P′∩P″=Φ)。关键点P′指几何特征比较明显,对点云配准起至关重要的点。非关键点P″指几何特征不明显,配准时可以忽略的点。对于任意点M 和它的邻近点N ,其主曲率分别为k1,k2和。点M 和N 之间的曲率差别可以看作是{k1,k2}和{}之间的差别。我们可以通过一个相对度量H 来衡量Hausdorff距离
当分母接近0时,误差较大。于是,我们引进临界值ε。当 ki+<ε 时, ki+应该转换为,用来防止误差较大。
M 点的Hausdorff距离可定义为:HM=max(H1,H2,H3,…,Hk)。其中:H1,H2,H3,…Hk为点M 与其邻域内k个邻近点的Hausdorff距离值。HM可以反映出M 点曲率的变化情况,对曲率变化大的区域保留足够多的特征点,用来突出模型的曲面特征,而在曲率变化小的区域保留少量的点,所有保留的点即为关键点。即当HM较大时,M 处的几何特征比较明显。我们采用HM值的正态分布图来获取点云的关键点。因为正态分布是自然界中一种常见的分布,存在于自然现象、生产、生活及科学技术等领域,我们绘制出点集P 的H 值正态分布图,模型大致如图1所示,横坐标是HM,纵坐标是在值为HM的点云个数n,在正态分布图中找到值H0使得小于H0的点 (图中阴影部分)占点总数的20%,即为非关键点,剩余80%为关键点 (经实验验证,28比例的划分效果比较理想)。关键点非关键点的划分使我们对点集P 进行了预处理,找出了集合特征明显的特征点。然后对几何特征明显的点进行配准,一方面节省了时间,另一方面使配准更具有针对性。我们在接下来的ICP配准时利用的就是这些几何特征明显的关键点,用来调高配准的精确度。
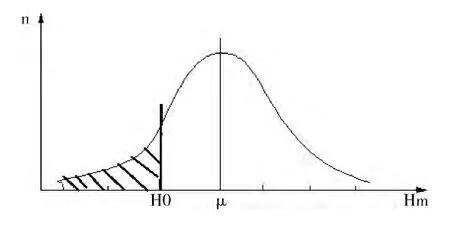
图1 点云正态分布
点集预处理算法流程说明如下:
步骤1 计算出集合P 中所有点的主曲率,利用式(5)计算。
步骤2 计算每个点及其邻域点的Hausdorff距离,并取最大值为该点的Hausdorff值,利用式 (8)计算。
步骤3 将集合P 中所有点的Hausdorff值进行统计,并绘制出HM正态分布图。
步骤4 根据上文介绍的分类方法,利用正态分布图H 值的分布情况将点云分为关键点P′和非关键点P″。
步骤5 完成点云的预处理。
2 改进的ICP算法

对两个三维点集P′和Q 进行ICP配准,步骤如下:
步骤1 利用k-d tree寻找P′中每一个点在Q 点集中对应的最近点。
步骤2 求得上述对应点对平均距离最小的刚体变换,即旋转变换向量qR和平移变换向量qT以及误差。
步骤3 对于P′使用上步求得的变换向量得到新的变换点集。
步骤4 当新的变换点集与参考点集Q 满足式 (9)的目标函数时,停止计算。否则跳转到步骤2 一直迭代,直到达到目标函数的要求。
步骤5 完成点云的配准。
本文采用了基于Hausdorff距离改进的ICP 算法,目的在于解决ICP算法的高精度要求。利用曲率能表示邻域形状变化的特性,引入Hausdorff距离的点集定义,对点云进行预处理,使得点云的配准更具有针对性。高精确度的优势使得该算法可应用于海量数据的逆向工程,本文的算法流程如图2所示。

图2 本文算法流程
3 实验结果与分析
为了验证本文算法的正确性和有效性,以经典算法作为对比,对三维模型进行了仿真实验。本文实验的硬件环境为Intel Xeon 的处理器,6.00G 内存的64位的win7操作系统。软件环境为PCL 点云库、Visual Studio2010、cmake3.0、华硕Xtion Pro Live。实验数据均取自PCL官网提供的pcd格式文件。
3.1 配准结果
点云bunny的点数分别为20480、18566,下面分别给出了经典ICP算法和本文ICP 算法的配准结果。图3 (a)为两片未配准的点云,浅灰色为源点云,深灰色为目标点云。图3 (b)为经典ICP算法的配准图。图3 (c)为本文改进的ICP算法的配准图。图4为经过30次迭代计算后的自由刚体变换。对比图3 (b)和图3 (c),图3 (c)中 浅灰部分深灰部分距离小于图3 (b)对应浅灰深灰点云之间的距离,可以得出图3 (c)的配准精度得到进一步提高。

图3 bunny实验配准

图4 bunny最优刚体变换
点云robot的点数分别为20991、19352,下面图分别给出了经典ICP算法和本文ICP算法的配准结果。图5 (a)为两片未配准的点云,图5 (b)为经典ICP算法的配准图。图5 (c)为本文改进的ICP算法的配准图。图6为经过30次迭代计算后的自由刚体变换。对比图5 (b)和图5 (c),图5 (c)中浅灰部分深灰部分距离小于图5 (b)对应浅灰深灰点云之间的距离,可以得出图5 (c)的配准精度有了很大的提高。
3.2 结果分析
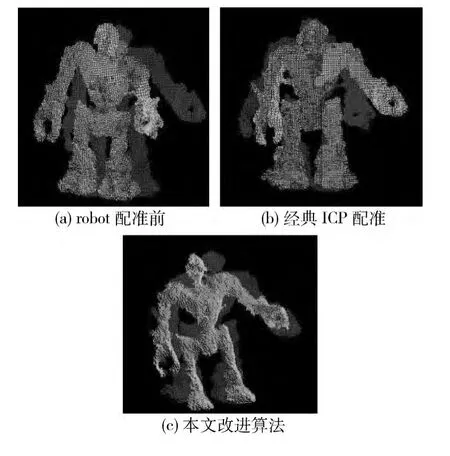
图5 robot实验配准
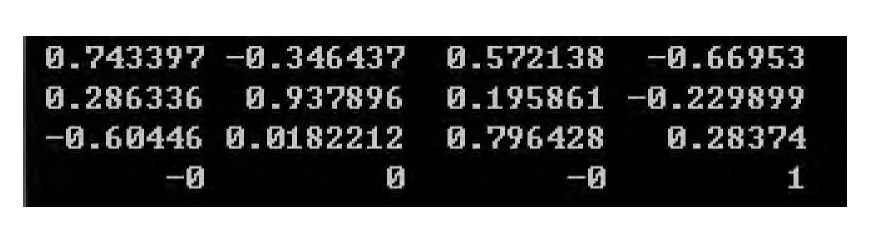
图6 robot最优刚体变换
实验的配准精度我们可以用配准误差来衡量。表1列出了经典ICP算法和本文改进算法的时间和精度,分别对bunny、robot、horse、dragon进行了实验。从表数据分析来看,bunny在时间上由3.842s缩短到了2.957s,配准精度由0.3929mm 提高到了0.1604 mm。我们可以得出,在配准时间几乎相近的情况下利用基于Hausdorff距离的改进算法能有效的找出均匀的关键点,实验精度有了很大的提高,取得了令人满意的效果。

表1 点云配准比较
由图7可以看出本文改进算法的配准误差明显低于经典算法,并且随着数据量的增大配准误差越低。改进算法配准在精度上有明显的优势,并且随着数据量的增大配准精度的优势越明显。因此该配准算法可以应用在对配准精度要求较高,点云凹凸性较明显的物体上。
4 结束语
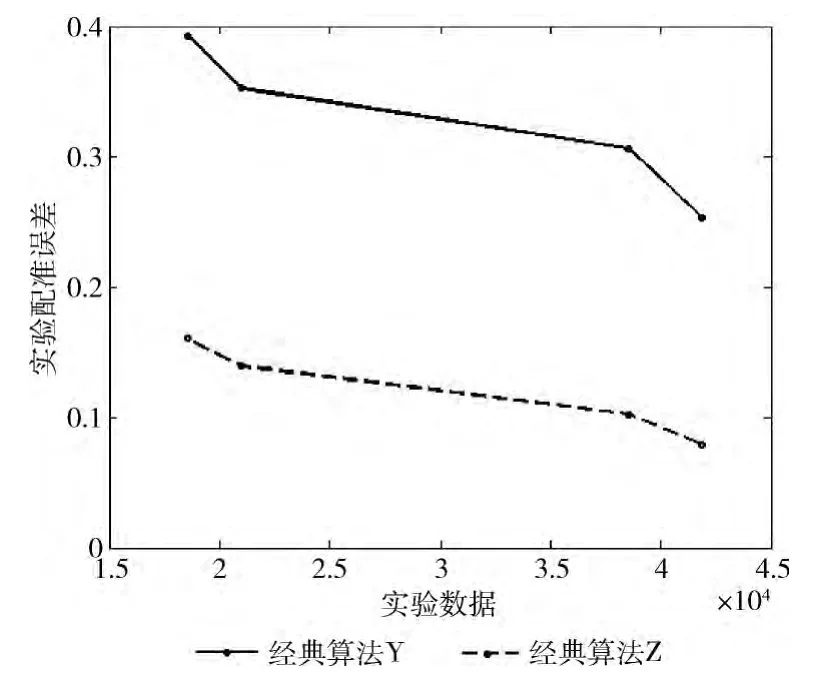
图7 改进算法与经典算法的配准误差比较
本文在研究了各种ICP 算法后,针对点云数据量大、对配准精度要求较高的情况,提出了一种基于Hausdorff距离改进的算法。采用三维点云拟合曲面的主曲率和点邻域内Hausdorff距离相结合的方法,利用正态分布图选择出点云几何特征明显的关键点。然后采用K-D 树加速查找,通过最小二乘迭代进行点云ICP 配准。实验结果表明,本文提出的算法提高了点云配准的精确度。在实际应用中,本算法适合对配准精度要求较高,点云凹凸性比较明显的物体配准上。
[1]DUN WZ,HUN G,HONG LX,et al.The research of optical 3D measuring precision influencing factor in reverse engineering [J].Applied Mechanics and Materials,2010,33:157-162.
[2]Hacene A,Mekki A.Bio-CAD reverse engineering of freeform surfaces by planar contours[J].Computer-Aided Design&Applications,2011,8 (1):37-42.
[3]XU Gang,WANG Chunyan.Based on vitural reality modeling language medical volume data reconstruction [J].Automation and Instrumentation,2012 (4):38-40 (in Chinese). [徐刚,王春燕.基于虚拟现实建模语言的医学体数据三维重建研究[J].自动化与仪器仪表,2012 (4):38-40.]
[4]Karen RS,Alexandra SC.Reliability of photogrammetry in the evaluation of postural aspect of individuals with structural scoliosis[J].Journal of Bodywork and Movement Therapies,2011,16 (2):210-216.
[5]LI Shifei,WANG Ping,SHEN Zhenkang.A survey of iterative closest point algorithm [J].Signal Processing,2009,25(10):1582-1588 (in Chinese).[李世飞,王平,沈振康.迭代最近点算法研究进展 [J].信号处理,2009,25 (10):1582-1588.]
[6]YANG Xianhui,WANG Huinan.Application research of ICP algorithm in 3Dpoint cloud alignment[J].Computer Simulation,2010,27 (8):235-288 (in Chinese). [杨现辉,王惠南.ICP算法在3D点云配准中的应用研究 [J].计算机仿真,2010,27 (8):235-288.]
[7]ZHU Yu,KANG Baosheng,LI Hong’an,et al.An improved method to streamline point cloud [J].Computer Application,2012,32 (2):521-524 (in Chinese). [朱煜,康宝生,李洪安,等.一种改进的点云精简方法 [J].计算机应用,2012,32 (2):521-524.]
[8]YU Xiaogao,YU Xiaopeng.Based on angular similarity K-nearest neighbor search algorithm [J].Application Research of Computers,2009,26 (9):239-256 (in Chinese). [余小高,余小鹏.一种基于角相似性的K-最近邻搜索算法 [J].计算机应用研究,2009,26 (9):239-256.]
[9]Bu Yanlong,Peng Shuangchun,Wangnan,et al.Constriction of mutual information based matching-suitable features for SAR image aided navigation [C]//International Conference on Environmental Science and Information Application Technology,2009.
[10]BAI Yanbing.Free-form surfaces Haudorff diatance approximation calculation to freedom of curves and surfaces[D].Beijing:Tsinghua University,2011 (in Chinese).[白彦冰.自由曲面到自由曲线曲面的Hausdorff距离近似值的计算 [D].北京:清华大学,2011.]
猜你喜欢
中国港湾建设(2022年12期)2022-12-28
数学物理学报(2022年4期)2022-08-22
中学生数理化·中考版(2022年12期)2022-02-16
今日农业(2021年8期)2021-11-28
数学物理学报(2019年5期)2019-11-29
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17
环球市场信息导报(2016年41期)2017-01-19
中学生数理化(高中版.高二数学)(2016年4期)2016-03-01
湖北师范大学学报(自然科学版)(2015年3期)2015-12-05
中国卫生(2014年2期)2014-11-12