
对虾去头柔顺机械手的设计与研究
2015-12-20 06:27张秀花王泽河弋景刚河北农业大学机电工程学院河北保定071001
食品与机械 2015年5期
韩 翠 张秀花 李 娜 王泽河 弋景刚(河北农业大学机电工程学院,河北 保定 071001)
目前中国水产品加工水平远远落后于发达国家,深加工设备少,尤其是对虾去头的相关设备[1-4]。对虾的虾头主要包括内脏、消化系统及可食部分,并且虾头含有重金属,食用后对人体伤害较大,同时在贮藏过程中对虾虾头容易破裂污染虾仁,使其变质,造成巨大的经济损失。每到虾汛期,鲜虾集中捕捞,为保证对虾虾仁的品质和后续加工的顺利进行,必须迅速进行对虾去头处理[5]。目前国内外均有相关的对虾去头专利,Edwin B.Mitchell等[6]设计了利用剪切块的形式去除虾头的去头装置;里德·P·阿兰[7]设计了利用掐断指片进行去头的去头装置;安玉平[8]设计了推卡阻切式对虾去头装置。这些去头装置都能完成对虾的去头动作,但是由于其机械结构复杂、成本高,使其应用受到了限制。目前中国在对虾去头方面仍以人工为主,效率低、加工环境恶劣、制品品质较低。
本试验在研究以往对虾去头设备[6-8]的基础上拟设计一种对虾去头柔顺机械手,通过去头试验确定机械手末端的形式,在确保完成对虾去头动作的前提下,不增加装置的复杂性,利用柔顺材料的变形实现所要求运动轨迹以提高无头虾得率。
1 材料与方法
1.1 试验材料与仪器
1.1.1 试验材料
鲜活南美白对虾:2014年8月份在河北保定市水产市场采购,体型呈长筒形,左右侧扁,头胸部、腹部和尾部均完整,虾仁饱满,虾头与虾身连接正常。
1.1.2 仪器与设备
游标卡尺:MNT-150型,上海迎特贸易有限公司;
电子秤:CX-688型,东莞南城长协电子制品厂;
图显式推拉力计:SPJ-B型,温州山度仪器厂。
1.2 试验方法
根据 SC/T 3016—2004《水产品抽样方法》和 SC/T 1102—2008《虾类性状测定》的要求,在同一批次中随机选取140只,平均分为7组进行去头试验。综合考虑去头方法的可行性和效果,选取的刀具形式为有刃刀和无刃刀,对虾去头的施力点分为背部、腹部、侧面(见图1),进行有刃刀背部去头、有刃刀腹部去头、有刃刀侧面去头、无刃刀背部去头、无刃刀腹部去头、无刃刀侧面去头6组试验。测量去头前的质量、去头后的质量、全长和头长,分析无头虾的得率与去头前质量、全长、头长的相关性[9,10]。通过6组去头试验确定最佳的施力位置和刀具形式。用剩余一组进行去头轨迹的优化。
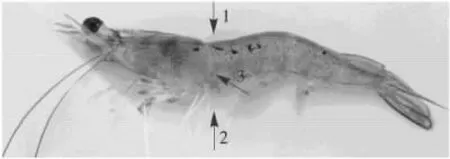
图1 对虾去头的施力点Figure 1 Point of shrimp head
1.3 试验指标
1.3.1 无头虾得率 按式(1)计算:

1.3.2 感官评定 组织5名试验人员成立感官评定小组,依据感官评定标准(见表1),对虾体的切断面质量进行感官评定。每组设计20次独立重复试验,为了增加试验的可靠性,减小误差,每组试验采用均值作为评定结果。
1.4 数据处理
相关分析(correlation analysis)就是通过分析采集来的实际数据,研究各变量之间的关系,确定关系的紧密程度和性质。相关性分析的任务就是对数据变量之间的关系进行计算和描述。本试验采用SPSS 17.0将统计的数据进行相关性分析,得出去头前质量、全长、头长、得率之间的相关系数,确定这几个变量间的类型和紧密程度,由于数据都是等距变量,所以采用相关性分析中的Pearson相关分析。

表1 感官评定标准Table 1 Sensory evaluation standards
2 结果与分析
2.1 对虾去头相关性分析
综合6组试验结果分析无头虾得率与去头前质量、全长、头长生物结构的相关性见表2。
表2 得率与生物结构的相关性Table 2 Correlation rate and biological structure

表2 得率与生物结构的相关性Table 2 Correlation rate and biological structure
**在0.01水平(双侧)上显著相关;*在0.05水平(双侧)上显著相关。
相关量 去头前质量 全长 头长 得率去头前质量1.000全长 0.803** 1.000头长 0.571** 0.972** 1.000得率 0.710**0.255 0.109 1.000
由表2可知:无头虾得率与去头前质量的相关程度为0.710,与全长的相关程度为0.255,与头长的相关程度为0.109。一般来说,反映相关性的相关系数若在0.40以下时反映变量之间低相关;在0.40~0.70时反映变量间较显著相关;在0.70~0.90时反映变量间显著相关;在0.90~1.00时则反映变量间最高相关[11,12]。分析结果表明去头得率与头长、全长均不是显著相关,与去头前质量为显著性相关,所以后期试验需要排除对虾去头前质量对得率的影响,后期试验将对虾的质量进行小范围固定。
2.2 对虾去头试验结果分析
由表3可知:同种去头方式中背部去头得率最高,施力点位置相同时有刃刀去头得率要大于无刃刀去头得率。由图2可知:对虾去头有刃刀背部的感官质量评分较高。所以可以确定对虾去头柔顺机械手末端为有刃刀在背部去头效果最佳。

表3 各种去头方式的平均得率Table 3 Average yield to head various ways%
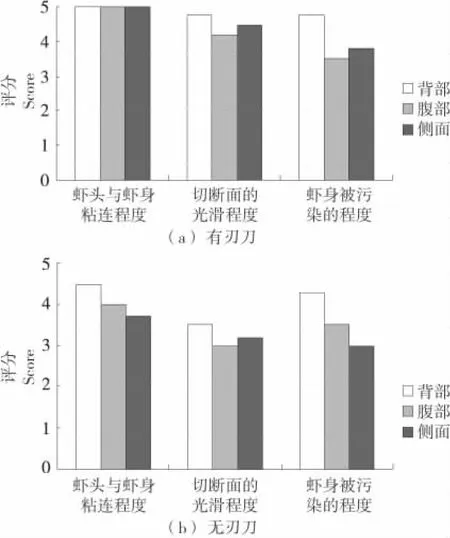
图2 去头后感官质量评分Figure 2 Head the sensory quality score
具体原因分析:进行去头时,若施力点在对虾腹部,头部与虾身没有明显界限容易导致去头位置不准确影响得率,同时腹部去头使对虾的头部组织受压迫严重,极易导致头部的脏器破裂,污染虾仁;若施力点在侧面,需选在对虾头胸甲的边缘,但头胸甲覆盖的一小部分虾肉又会被去除,导致无头虾的得率降低;若施力点在背部,去头时先把头部组织与虾身分离,使得虾仁不易被污染,同时保证无头虾得率,所以最优施力点为对虾的背部。有刃刀所得无头虾得率和感官质量评分明显优于无刃刀,这是由于对虾的肌肉组织比较细嫩,若采用无刃刀则切断面的虾肉组织容易被撕裂和扯断,感官质量很差,更不用考虑有齿刀具等。
2.3 对虾去头轨迹的确定
观察去除的虾头并进行解剖发现,虾头的头肉部分占有一定比例,因此设计一种去头轨迹,尽可能多地保留对虾的头肉部分,提高无头虾的得率,减少虾肉的浪费。用1组对虾进行去头轨迹的优化见图3,采用盘状刀进行弧线状轨迹去头,保留头肉部分,测量去头前后质量,弧线状去头分析结果见表4。
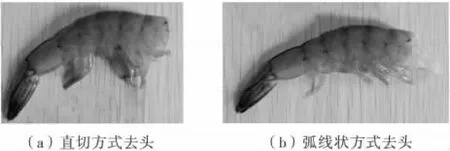
图3 无头虾的形状Figure 3 Headless shrimp shape

表4 弧线状去头分析结果Table 4 Arc shaped head analysis results
由表4可知:采用弧线状去头轨迹所得无头虾的得率明显高于直切方式的得率。原因是弧线状去头保留了对虾头部的头肉部分,减少了虾肉的损失,感官质量评分与直切方式相差不大。所以柔顺机构末端应能实现弧线状轨迹,才可以提高无头虾的得率。
3 装置设计仿真和试制试验
3.1 总体结构
根据以上试验确定的对虾去头柔顺机械手末端的最优结果,为了解决弧线状的轨迹,又不增加装置的复杂性,采用柔顺材料变形来实现该运动轨迹。柔顺机构具有构件数量少,运动和力的传递是利用其组成的构件变形来实现,可以避免长期工作的机械磨损等优点[13]。因此设计了一种对虾去头柔顺机械手,该装置包括柔顺机械手、固定装置、气缸3个部分,整体结构见图4。柔顺机械手部分通过滑块部分与侧挡板形成移动副,以达到定位的作用,侧挡板与顶板为一个整体固定在机架上,气缸为柔顺机械手提供动力。
柔顺机械手为柔性材料制成的等截面的全柔顺构件,呈轴对称,通过柔性材料的变形来实现末端的弧线轨迹,两个柔顺机械手末端可以同时对两条生产线上的对虾进行去头。同时通过柔性材料的弹性储能,能自动恢复到原来的形状,柔顺机械手内部结构见图5。
3.2 运动原理
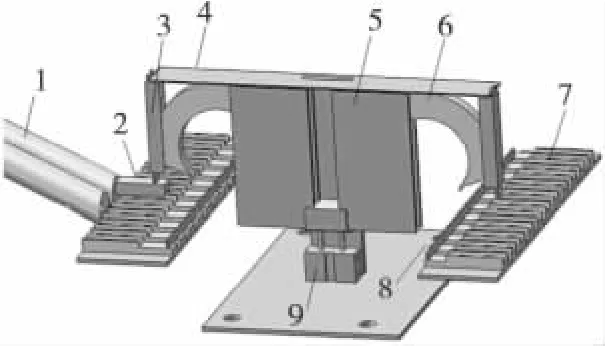
图4 柔顺机械手整体结构Figure 4 Overall structure of compliant manipulator

图5 柔顺机械手内部结构Figure 5 Internal structure of compliant manipulator
柔顺机械手与侧挡板之间的移动副限制了柔顺机械手只能做平面上的运动,在柔顺机械手的对称轴部分作为动力的输入部分,动力输入采用直线气缸。当气缸作用时,柔顺机械手受力向上运动,但由于有顶板的限制,使得动力由直线转为绕点的旋转,柔顺机械手圆弧部分在等效铰链的作用下做圆弧运动,使得末端也做圆弧运动,完成去头动作,去头完成后气缸撤去外力后,由于柔性材料的弹性储能,自动恢复到原来的形状,从而实现了直线的输入,圆弧轨迹的输出。
3.3 柔顺机械手虚拟样机设计
本装置利用Solidworks软件的零件设计模块进行三维建模并进行装配,运动ADAMS软件进行运动的仿真。把基本模型从Solidworks软件导入到ADAMS软件中。利用ADAMS软件对整个机构添加约束,除了对部件添加力、固定等约束以外,若要形成理想的轨迹还要添加2个接触约束,通过接触约束限制其自由度。如图6所示为柔顺机械手变形前、后的形状。仿真结果显示该装置可以实现预期的运动效果,仿真的运动轨迹线符合对虾去头的弧线状轨迹,结构和驱动简单方便。

图6 柔顺机械手变形前、后的形状Figure 6 Compliant manipulator deformation,shape
3.4 柔顺机械手样件试制与实验验证
3.4.1 柔顺机械手样件试制 根据仿真确定的模型参数及材料特性,本装置采用厚度为15mm的聚氨酯材料进行样件的试制,模型的函数图像见图7。
各段函数解释式为:

柔顺机械手试制样件见图8,选择水产品市场采购的鲜活对虾,质量分布范围为17~19g,整体结构完整,虾仁饱满,对虾头部与虾身连接正常,进行对比实验验证。
3.4.2 试验数据与结果分析 由表5可知,用柔顺机械手装置去头比刀具直切式去头,无头虾的得率由65.18%提高到了70.78%,该方法虽然在效率上有待验证,但为对虾去头设备的研制提供了一种新的方法和思路,可为后期对虾去头装置的研究提供参考。
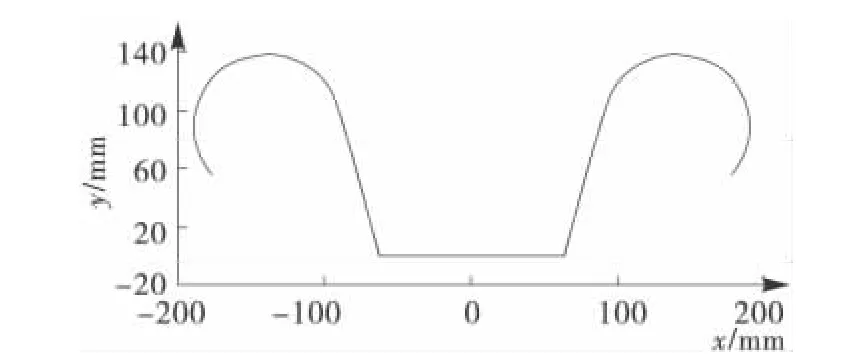
图7 柔顺机械手函数图像Figure 7 Function image of compliant manipulator

图8 柔顺机械手样件Figure 8 Compliant manipulator

表5 去头试验数据Table 5 Test data to the head
4 结论
本试验在研究以往对虾的去头方式的基础上,设计了一种对虾去头柔顺机械手装置,并结合试验确定了机械手末端为有刃刀、背部为施力点;根据试验确定的参数进行柔顺机械手整体结构的设计并进行了仿真分析,发现该结构可以实现所要求的轨迹,并进行了后期的试制及试验,通过试制和实验验证了该方法可以使无头虾的得率提高到70.78%,提高了虾仁的利用率和经济价值,但本试验只制成了第一代样件,样件在结构上仍可以进行优化,以进一步提高效率。
1 崔禾.纵观全球养殖对虾产业现状分析我国对虾产业发展趋势(一)[J].中国水产,2006(4):14~17.
2 王东石,高锦宇.中国对虾养殖现状与持续发展的途径[J].渔业现代化,2003(3):3~5.
3 陈文汉,宁陵.中国对虾产业现状及相关研究综述[J].理论研究,2008(2):21~27.
4 张丽丽,王泽河,张秀花,等.对虾开背工艺方案的设计与研究[J].食品与机械,2013,29(5):127~130.
5 刘洪亮,陈丽娇.对虾虾头、虾壳副产品综合利用的研究概况[J].福建水产,2011,33(2):65~69.
6 Edwin B Mitchell,Beaufort.Apparatus for sizing and deheading shrimp:United States Patent,4016625[P].1976—07—19.
7 里德P阿兰.用于加工对虾的方法和设备:中国,90107762.3[P].1991—04—17.
8 安玉平.机械加工虾类的方法和设备:中国,92103822.4[P].1993—12—15.
9 陈庆余,沈建,傅润泽,等.典型海产小杂鱼机械去头方法研究[J].渔业现代化,2012,39(5):38~42.
10 李小强,王芬娥,郭维俊,等.橄榄根茎切割力影响因素分析[J].农业工程学报,2013,29(10):42~48.
11 张苏江,陈庆波.数据统计分析软件SPSS的应用—相关分析与回归分析[J].畜牧与兽医,2003(9):96.
12 姜启源,谢金星,叶俊.数学模型[M].北京:高等教育出版社,2003.
13 余跃庆.柔顺机构学[M].北京:高等教育出版社,2007.
猜你喜欢
当代水产(2022年8期)2022-09-20
当代水产(2022年5期)2022-06-05
当代水产(2021年8期)2021-11-04
当代水产(2021年4期)2021-07-20
制造技术与机床(2018年11期)2018-11-23
文理导航·科普童话(2017年4期)2018-02-10
河北农机(2017年12期)2018-01-20
制造技术与机床(2017年4期)2017-06-22
文理导航·科普童话(2017年2期)2017-05-31
通信电源技术(2016年1期)2016-04-16
