新型受力可调节肩关节牵引器的设计与应用
2015-12-19 07:15:37苏增生苏秋玲洪范宗
医疗卫生装备 2015年10期
苏增生,苏秋玲,洪范宗,王 伟
新型受力可调节肩关节牵引器的设计与应用
苏增生,苏秋玲,洪范宗,王伟
目的:研制一种新型肩关节牵引器,用于肩关节手术中拉开肩关节间隙,确保牵引力受力方向可调节、大小恒定,从而方便手术操作。方法:依据手术需求设计牵引器的机械结构,包括横架、支撑架、滑轮、安装槽及脚托固定装置等关键部分,采用铝合金和不锈钢材料进行加工组装,以适应承重极限,并根据不同手术床长度和宽度、不同患者身高和双肩宽度,设计合适的牵引器支撑架高度、横架长度等。结果:该牵引器克服了人工操作中牵引间隙不够、放置体位时间较长、术中不便于调节牵引方向、受力不均易引起神经血管损伤等问题,可方便地固定或持续调节患者单侧肩关节的外展或内收。结论:该牵引器使用方便,解决了人工操作带来的人员配备与牵引力度、角度等的持续性与稳定性问题,具有很大的实用价值。
肩关节;牵引;可调节;关节镜手术
0 引言
肩关节由肱骨头及肩盂构成。肩盂小而浅,仅占肱骨头的1/3~1/4[1]。肩关节常因间接暴力导致脱位。目前,肩关节手术中仍多采用传统的足蹬复位法,双手握患肢腕部,足跟顶住腋窝做对抗牵引,做外展、外旋、内收、内旋等动作[2]。人工操作容易出现外展的程度不够,足蹬与手牵互相拮抗;或者外展、外旋与内收、内旋的操纵掌握不恰当,使关节囊及其周围组织处于紧张状态,关节囊破裂处闭锁,加上肩袖组织的箍钳作用,给复位造成困难。出于这个原因,现有技术主要采用搭肩、过肩、外展平肩等牵引的方法克服上述问题[3]。这些牵引方法都需要人工参与,牵引效果受到人为因素影响较不稳定。而合适的体位是关节镜手术成功的基础[4-5]。目前,大多肩关节手术中的体位调节均由手术护士执行,并根据手术需求微调。为降低医务人员的劳动强度,费文勇[6]、马贵芳[7]及常州市第一人民医院等分别研制了合适的肩关节镜手术用牵引装置[8-11],采用机械传动实行牵引,将人体生理学与机械物理力学结合起来,有效解决了人工牵引的不足。但是传统型牵引架仍存在牵引间隙不够、放置体位时间较长、术中不便于调节牵引方向、容易引起神经血管损伤等问题。曾武章等[12]发明了一种肩部牵引架,该牵引架的两端分别设有一滑轮并配有牵引线。在实际使用中,由于位置关系,牵引架上的滑轮和患者的手臂常存在一个角度,导致滑轮难以转动甚至不能转动的情况,此时就需要重新调整患者的位置或者牵引架的装配位置,这很不利于对患者患肢的保护,甚至造成二次伤害。使用该牵引架也较为麻烦,耗时长,不利于及时救治患者。
本文研制了一种新型肩关节牵引器,用于肩关节手术中拉开肩关节间隙,确保牵引力受力方向可调节、大小恒定,并克服现有的肩关节牵引器存在的滑轮与牵引线常存在一个夹角,进而导致滑轮难以滚动,需要多次调整患者或者牵引器位置,使用麻烦,不利于患者安全救治的问题。
1 总体方案设计
采用Auto CAD 2010软件,绘制好图框和标题栏后,通过软件程序中的机械图库选择基本图形元素及图库中的螺母、螺钉等图块依次绘制主视图和关键设计点视图文件。
设计的肩关节牵引器如图1所示,包括横架、支撑架、安装槽及脚托固定装置。其中支撑架高度可调,下端插在手术床沿的脚托固定滑块中;顶部的U形安装槽和螺钉用于固定横架的位置,横架两端各固定一个带槽的定滑轮,牵引绳穿过滑轮槽,一端连接配重水袋,另一端固定在患者手腕部;患者一侧的定滑轮能够以横杆为轴心旋转一定角度,有利于滑轮的顺畅转动,避免手术过程中改变患者位置或者牵引器的位置,使得牵引器在肩关节手术中能够持续牵引使逐渐外展、内收患肢,可克服人工操作产生的问题,也符合肩关节受伤机制,可拉开肩关节间隙,方便手术操作。
2 各部件的结构设计与组装
2.1横架的结构设计
如图2所示,横架由左右2段空心不锈钢方形管对接而成,包括左支杆和右支杆。右支杆的左端侧壁上设有至少3个均匀分布的调节孔,左支杆右端面设有插孔,右支杆左端插设于该插孔内,且在左支杆的侧壁上设固定孔以及适配的固定针,固定针贯穿该固定孔并延伸至其中一个调节孔内。横架中间位置间隔2.5 cm钻有一排螺钉孔,使用时将横架水平放置在支撑架的U形安装槽中,并使安装槽侧面的螺钉孔对准横架中部的某个螺钉孔后,将固定螺钉旋入安装槽的螺钉孔中,即可将横架固定在支撑架顶部。调节安装槽对准横架上不同的螺钉孔即可调节横架左右臂的长度,横架患者侧可调节长度范围为107~130 cm。
图3为对接部位的示意图,左右2段方形管对接处加工成长度为2.8 cm、直径2.37 cm的圆柱,距圆柱顶端0.8 cm处加工一圈凹槽,对接处有一深度3 cm、直径2.5 cm的圆柱孔,距离孔边缘2.08 cm处钻一个螺钉孔。旋紧固定螺钉可以将横架左右2部分对接成一个整体,稍微旋松螺钉后,旋转部分可沿横架的轴心旋转任意角度。
横架两端的上下底面上各开有一个方形孔,如图4所示,安装一个带有滑轮槽的定滑轮,滑轮轴固定在横架侧面的孔中。

图1 肩关节牵引器立体结构图

图2 肩关节牵引器横架结构图
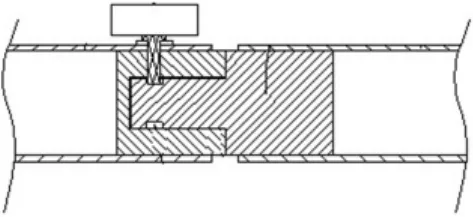
图3 肩关节牵引器横架2段方形管组装示意图

图4 定滑轮位置及安装示意图
2.2支撑架的结构设计
如图5所示,支撑架由上支杆和下支杆构成,分别为2截不同直径的圆形空心铝合金管。上支杆侧壁上设有至少3个均匀分布的调节孔,下支杆上端面设有插孔,上支杆插设于该插孔内。同时,下支杆侧壁上设有固定孔以及相适配的固定针,该固定针贯穿该固定孔并延伸至其中一个调节孔,套接成支撑架。上下支杆对齐不同的螺钉孔位置后旋入固定针,就可以调节支撑杆的高度,其可调高度范围为107~189 cm。
如图6所示,支撑架的底部设计成直径1.35 cm的实心铝合金杆(图5下半部分),使用时插入手术床沿的脚托固定器中间,然后旋紧固定螺钉即可。
2.3牵引绳与挂钩的结构设计
牵引绳采用直径2 mm的钢丝绳,长度280 cm。牵引绳两端各有一个不锈钢材质的挂钩,使用时一端挂适量的配重水袋,另一端钩住患者患肢腕部缠绕的纱布。当患者或手术床位置改变时,旋转部分调节角度即可确保滑轮受力方向与钢丝绳牵拉方向一致。

图5 肩关节牵引器支撑架结构图

图6 支撑架与手术床安装示意图
2.4组装
如图1所示,支撑架的上端设有U形安装槽,横架的底面与安装槽槽底贴合连接,安装槽槽壁上钻有一个贯通两侧的螺钉孔,固定螺钉贯穿该孔以及横架中部的螺钉孔,将横架固定在支撑架的顶端。
3 应用效果
将牵引器用于肩关节手术中固定或持续改变患者单侧肩关节的外展或内收,拉开肩关节间隙,既能方便手术操作,又可避免人工操作带来的人员配备与牵引力度、角度等的持续性与稳定性问题,用于肩关节镜手术,有利于患者位置调节,保证手术的顺利进行。
我们设计的新型受力可调节肩关节牵引器以横架和支撑架组成的T字框架为主体,实物应用如图7所示。与传统牵引器相比,在横架部分至少设置一个旋转端,并于旋转端装配滑轮,使其可绕轴旋转,从而确保牵引器在牵引过程中滑轮的受力方向可调节。不仅有利于滑轮的顺畅转动,避免了手术过程中需要变化患者的位置或者牵引器的位置,使得牵引器在肩关节手术中能够持续牵引使逐渐外展或内收患肢,克服了人工调节的缺陷,也符合肩关节受伤机制,避免了二次伤害。

图7 肩关节牵引器应用效果图
肩关节牵引器组装完成后在我院投入使用1a多以来,成功开展临床应用40例,包括肩关节盂唇损伤8例、肩袖损伤15例、冻结肩7例、肩关节滑囊炎7例和肩峰下撞击症3例,肩关节牵引器质量轻、安装操作方便,在手术过程中能维持患肢良好的外展、前屈体位,保证有效、恒定、合适的牵引力量,获得良好的肩关节腔视野,从而方便手术操作,防止臂丛神经牵拉损伤。
4 结语
本文针对肩关节的特殊结构,研制肩关节镜手术使用的一种有效上肢牵引装置,使侧卧体位患者维持患肢合适的外展、前屈体位,有利于获得良好的手术视野,方便手术操作。研制的肩关节牵引器为T形架构,其结构简单,包括横架、支撑架、安装槽及脚托固定装置等,具有伸缩、旋转及拆卸功能,方便安装、拆卸及收藏,并可灵活、准确地调节牵引力线及控制牵引力量,通过横架上的滑轮维持稳定的牵引力,应用效果较好。
[1]王岩.坎贝尔骨科手术学(中文版)[M].11版.北京:人民军医出版社,2009.
[2]赵鸿声,靖光武,张建军,等.俯位改良Hippocrates法整复肩关节脱位[J].中国骨伤,2012,25(3):256-257.
[3]丛卉,周谋望,杨延砚,等.不同体位肩关节旋转肌群等速肌力评定的重测信度研究[J].中国康复医学杂志,2014,29(1):36-41.
[4]叶育培,张三强,娜日苏,等.沙滩椅体位在肩关节镜手术中的应用[C]//中华护理学会第2届国际手术室护理学术交流会议论文集.西安:中华护理学会,2009:1 193-1 194.
[5]张秀文,俞飞燕,张利元,等.应用普通电动手术床设计肩关节镜沙滩椅体位介绍[J].护士进修杂志,2013,28(8):768,封3.
[6]费文勇.肩关节镜手术沙滩椅体位牵引系统:中国,2013205125 47.0[P].2014-02-12.
[7]马贵芳.一种肩关节牵引架:中国,201320043428.5[P].2013-07-31.
[8]常州市第一人民医院.肩关节镜上肢牵引装置:中国,201320417403.7[P].2013-12-25.
[9]上海市长宁区光华中西医结合医院.肩关节镜手术体位牵引架:中国,201220442363.7[P].2013-02-20.
[10]南京大学医学院附属鼓楼医院.肩关节镜手术用滑轮牵引架:中国,201220115158.X[P].2012-12-05.
[11]吴成.简易肩关节镜手术牵引架:中国,201220644450.0[P].2013-06-05.
[12]曾武章,曾俊华.肩部牵引架:中国,201210105915.X[P].2012-08-01.
(收稿:2015-01-05修回:2015-05-12)
Design and application of new shoulder joint dragger with adjustable pulling force
SU Zeng-sheng,SU Qiu-ling,HONG Fan-zong,WANG Wei
(Department of Medical Engineering,the 180th Hospital of the PLA,Quanzhou 362000,Fujian Province,China)
Objective To develop a new shoulder joint dragger to open the gap in the joint,which has the constant traction force adjustable in all directions.Methods The dragger was composed of the components of crossarm,support frame,pulley,mounting groove,foot-support fixing device and etc,which was made of aluminum alloy and stainless steel material.The support frame height,crossarm length and etc could be adjusted according to the length and width of the operating table as well as the height and shoulder width of the patient.Results The dragger eliminated the deficiencies of artificial operation in unenough gap,direction adjusting,injuries in nerves and vessels due to uneven force and etc,and thus could keep or regulate the states of unilateral shoulder for abduction or endoduction.Conclusion The dragger solves the problems due to artificial operation in the continuity and stability of the dragging force and angle,and thus has great practical values.[Chinese Medical Equipment Journal,2015,36(10):45-47]
shoulder joint;dragging;adjustable;arthroscopic surgery
[中国图书资料分类号]R318.6;TH772.1A
1003-8868(2015)10-0045-03
10.7687/J.ISSN1003-8868.2015.10.045
专利:国家实用新型专利(ZL 201420281512.5)
苏增生(1981—),男,工程师,主要从事医疗设备维修维护方面的研究工作,E-mail:sssuxingxing@163.com。
362000福建泉州,解放军180医院医学工程科(苏增生,苏秋玲,洪范宗,王伟)
苏秋玲,E-mail:suqiuling0818@163.com
猜你喜欢
实验流体力学(2022年6期)2022-02-06 03:14:26
橡塑技术与装备(2022年1期)2022-01-20 08:41:00
建材发展导向(2021年14期)2021-08-23 00:56:56
传媒评论(2019年1期)2019-03-25 13:49:18
橡塑技术与装备(2018年18期)2018-09-22 08:05:12
西南石油大学学报(自然科学版)(2018年1期)2018-02-10 05:23:14
护理实践与研究(2016年12期)2016-10-31 06:33:37
发明与创新(2016年22期)2016-10-13 07:43:14
发明与创新·中学生(2016年6期)2016-05-14 16:08:57
石油管材与仪器(2015年4期)2015-12-24 03:36:36