基于雷达及AIS的水上设施自动警戒与保护
2015-12-19 09:18冯爱国吴炜季本山
中国港湾建设 2015年6期
冯爱国,吴炜,季本山
(南通航运职业技术学院,江苏 南通 226010)
0 引言
在海上划定指定区域,通过雷达、AIS等技术手段对意欲进入或已闯入目标进行监控,对保障航行安全、保护重点设施、维护国家海洋权益具有十分重要的意义,“911事件”以后,SOLAS公约及ISPS规则为航行安全、反恐等提出了相应的要求,其中,防止擅自进入重要设施及限制区域,对擅自进入行为进行自动和高效的识别并快速反应等都给相关技术以很大研究空间。
以计算机技术为核心的现代航海雷达集成了船位、航向、航速等基础传感器信息,通过目标捕获、跟踪解算流程可以获得目标方位、距离、真航向与真航速等位置与运动数据,并可以实现雷达视频目标与AIS目标数据融合,使得雷达与AIS目标数据在船用雷达上可以一站式获取[1-3],促进了基于计算机图形学与人工智能的监控系统快速发展。
所以,利用第三方测控参数引导,以MCU、工控计算机与智能传感器为核心的高度自动化集成警戒系统具有较高的研究价值。
近年来,计算机图形算法随着计算机处理能力的大幅提升,在工程中应用越来越广泛,涉及地理信息、机械设计、虚拟现实等多种领域。STCW公约2010马尼拉修正案履新以来,电子海图显示与信息系统强制范围大幅拓展,为航海与海事管理、港湾工程监控提供了更好的平台。
1 与区域警戒相关的几何问题
警戒区设置的基本几何形状一般可体现为直方形、圆形、椭圆形、不规则多边形等,椭圆形不常见,故文中不作讨论。圆形区域的判定算法相对简单,方法与多边形有所不同,直方形隶属于多边形,可以一并讨论。
1.1 警戒区设置基本几何元素
点、线段、射线、直线、圆、简单凸壳多边形、非凸壳复杂多边形为水上平面区域设置的基本几何元素,见图1。
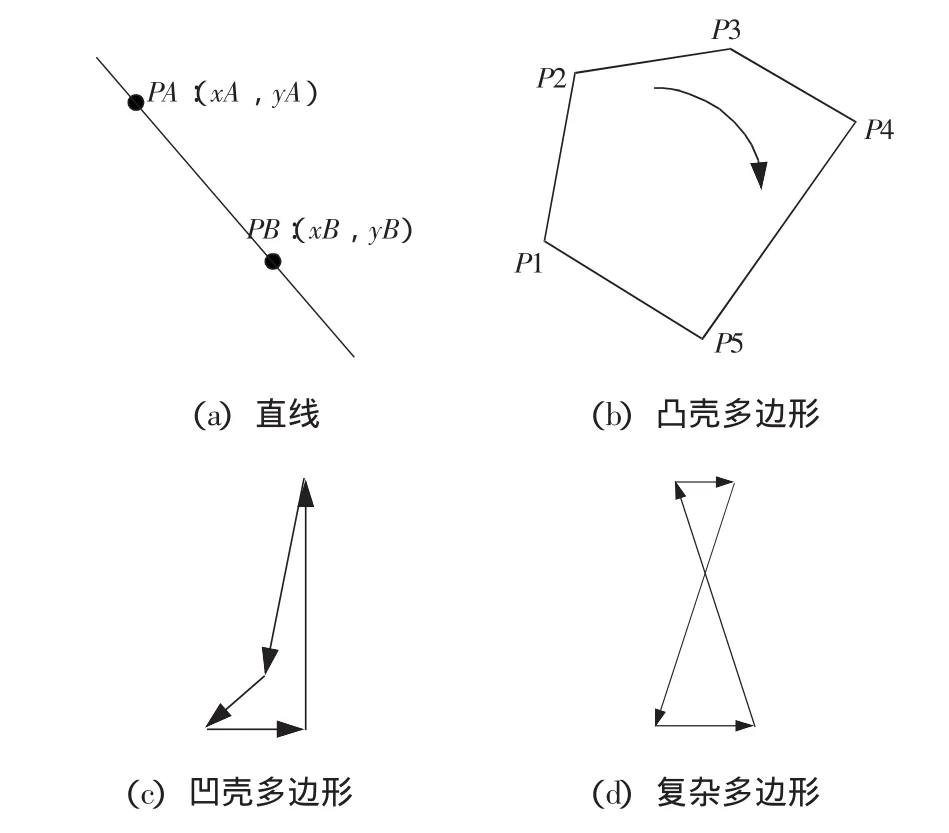
图1 警戒区域Fig.1 Alert region
对于点,描述为:P=(xP,yP),在海图平面内xP用经度(longitude)量化,为与数学计算习惯一致,设西经为负东经为正(-180°~+180°),yP用纬度(latitude)量化,设北纬为负南纬为正(-90°~+90°),判断算法中与墨卡托投影纬度渐长率无关,基于电子海图的警戒结果图形化表达时考虑纬度渐长率。
对于直线,描述为L:Ax+By+C=0,或L:PA-PB,或 L:PA+k(PB-PA),第一种适合用解析法解决问题,便于计算机实现。过已知AB两点的直线如图1(a)。
计算机构建直线L:Ax+By+C=0。A=yA-yB;B=xB-xA;C=xA×yB-yA×xB。
若描述为线段或射线,需对x取值范围约束。
对于多边形,以点描述为:S:(P1,P2,…,PN)
以边描述为:

第二种保持了与直线描述的连续性更利于运用解析法判断,简单凸壳多边形如图1(b),其典型特点为相连封闭,区域内任意两点连线不与边交。凹壳多边形则相反如图1(c)。若封闭多边形的边自交,则为复杂多边形如图1(d),水上警戒区域多不作此设定,不予讨论。
对于圆,考虑墨卡托投影纬度渐长,可近似描述为,S:(x-xA)2+(y-yA)2sec2y=R2,P=(xA,yA)表示圆心,适用于解析法解决存在性问题。
1.2 检测点是否位于设定区域内的判断算法
1.2.1 多边形区域的检测方法
射线法:对于检测点Q,在平面直角坐标系内从Q点向下构建射线,数学描述为L:x=a,(y<b)。在海图平面内,a由经度量化, b由纬度量化。航海学描述为从检测目标地理位置向南构建一条射线。
对于凸壳多边形,检测点Q是否位于区域内可由交点数确定,若Q位于区域内,易见构建射线与凸壳多边形有且仅有1个交点,否则无交点或有2个交点如图2(a)。
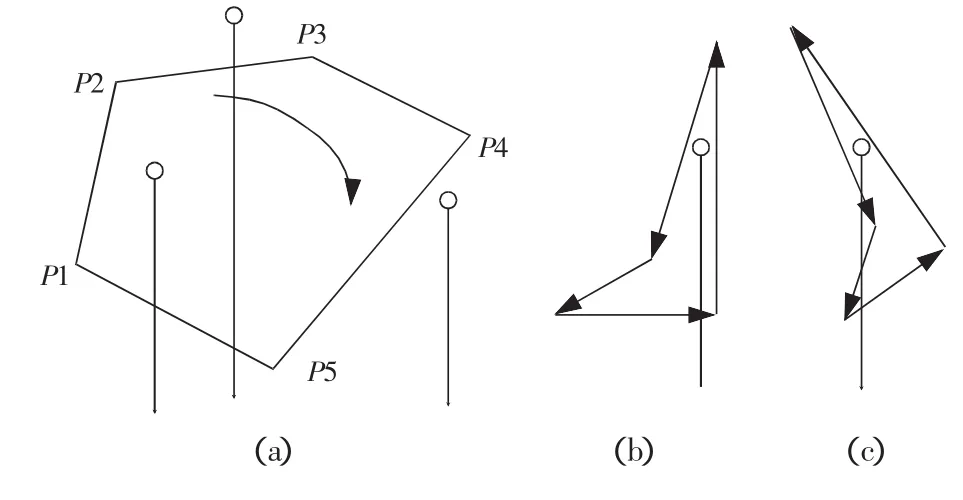
图2 多边形警戒区位置检测示意图Fig.2 Position detection of polygon alert region
进一步得出非凸壳多边形检测点存在性判断算法:若顶点在x轴向无回溯,交点数与判断结论与凸壳多边形检测法一致如图2(b),若顶点在x轴向有回溯如图2(c),若Q位于区域内,图中可见构建射线与多边形有3个交点,若不在区域内,有2或4个交点或无交点。所以,对于不自交多边形警戒区域,若构建射线与多边形交点数为奇数,检测点在区域内,若为0或偶数,检测点不在区域内。
极角法:设顺时针量取为“+”,若Q在内部:∠P1QP2+ ∠P2QP3……+∠PNQP1= ±360°;若Q在外部:∠P1QP2+∠P2QP3……+∠PNQP1=0°。极角法不适合系统采用计算机手段对检测点检测判断[4]。
1.2.2 圆形区域的检测方法
距离法:对于圆形警戒区域,若检测点Q在内部,Q=(xQ,yQ),满足(xQ-xA)2+(yQ-yA)2sec2y≤ R2,否则反之。
2 目标雷达与AIS数据警戒区监测关键技术
2.1 基于雷达与AIS的目标位置及运动参数采集
现代导航雷达具有罗经、计程仪、DGPS、AIS多传感器数据融合、视频量化、目标捕捉、α-β简化卡尔曼滤波跟踪、目标运动参数解算、碰撞危险分析与报警、试操船等多个功能,能够利用回波信息对目标进行精确的方位距离定位,以此为基础对目标按一定的时间步长进行连续跟踪,可以计算出目标相对本船的运动参数并进行碰撞危险分析,结合本船航向航速数据,可解算目标真运动数据。
根据EPFS的本船船位,由下式计算目标地理位置数据:

式中:S为目标距离;TB为目标方位;(Dλ,Dφ)为经、纬度差;(λ0,φ0)为雷达位置;(λT,φT)为目标位置。
符合IEC61162-1标准的雷达数字广播有6种语句,其中包含雷达电子方位线、活动距标圈及雷达操作杆光标。雷达系统信息语句格式为[5]:

目标跟踪语句格式为:

同理,AIS串口输出目标船数据也满足IEC61162协议,按照ITU-RM.1371-1协议解析获得船舶的动静态信息,涵盖了信息类型、重复指示、目标船识别码MMSI码、航行状态、转向速率、对地航速、位置精度、经度、纬度、对地航向、真航向等。
2.2 警戒区域内外评判流程
首先,调用有效覆盖警戒区的一个或多个雷达,若目标为“合作船舶”,雷达处理器同时提供AIS接口的目标自动识别数据,并将目标的雷达跟踪信息和目标的AIS信息进行时空对准,使两种数据处在同一时域和空域上实现航迹关联,关联检测出同一目标的雷达和AIS关联数据;若目标为“非合作船舶”,无AIS数据,身份为“不明船舶”。

遍历完毕,若交点计数cntnum%2==0,则交点总数为偶数,检测目标不在多边形内;否则反之[6]。
对圆形警戒区,求检测目标Q:(λT,φT)与圆心距离,若小于半径,目标在内部,否则反之。
2.3 警戒目标对保护目标危险评判
系统对危险目标的态势智能感知,主要通过对海量的船舶历史数据进行分析和挖掘,将这些有意图的船舶检测出来,一般分为在监控海域出现多次的船舶、滞留超时的船舶、监控海域内往复航行的船舶、异常机动船、对动态及静态保护目标构成威胁的船舶等,重点监测出对保护目标构成威胁的船舶,构成威胁船算法如下。
已知:警戒区内目标地理位置 Q:(λT,φT),保护目标地理位置 P:(λP,φP),计算出监测目标相对保护目标方位、距离(B0,R0);又已知监控目标对地航向、航速(CT,VT)(由雷达或雷达AIS采集),保护目标航向、航速(CP,VP),计算警戒目标危险系数步骤如下[7]:
1) 计算监控目标东西、南北向航速:d VTX=VTsin CT;d VTY=VTcos CT;
2) 同理:计算保护目标东西、南北向航速:d VPX=VPsin CP;d VPY=VPcos CP;
3) 监控目标相对保护目标航向、航速:

若 (d VX< 0,d VY< 0),C=C+360°;
4)监控目标至最近会遇点距离、时间:

5)最近会遇距离:

至最近会遇点所需时间描述了监控目标抵近保护目标的紧迫程度,最近会遇距离描述了监控目标的危险程度,若小于安全阈,系统报警并触发后续措施。
3 仿真验证
利用船舶模拟器设置雷达本船和目标船,监控雷达位置(λR=120°7.6′,φR=30°5.1′),静止,测目标的初始方位距离是(B0=28.63°,R0=6.59 n mile),连续监控得5 min目标航行轨迹如表1。

表1 数值计算结果Table 1 Resultsof numerical calculation
编程解算结果图形显示表达如图3。
设警戒区内重点保护目标位置(λR=120°17.6′,φR=30°5.1′),闯入目标与保护目标危险度图形表达如图4。
4 结语
提出了一种小型水面监控系统,通过对目标
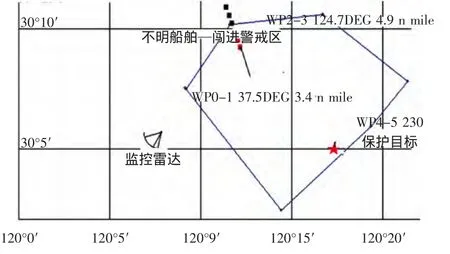
图3 实验解算验证Fig.3 Calculating validation by experiments
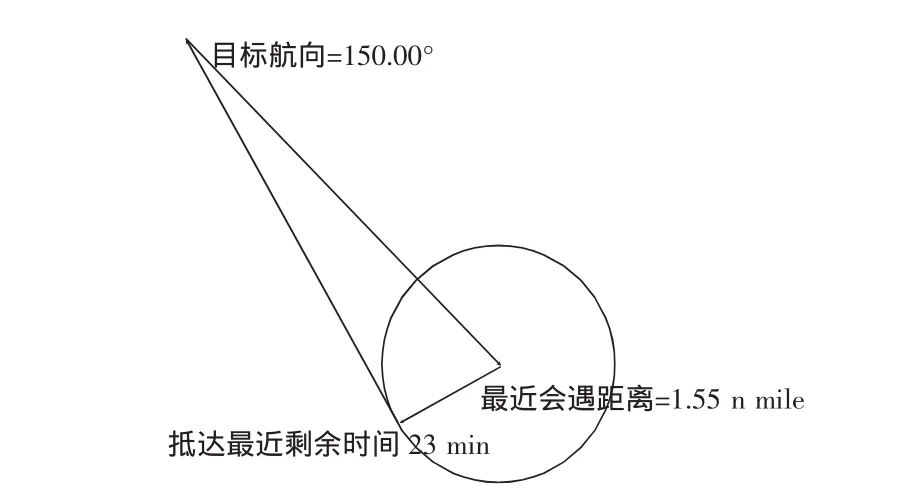
图4 危险目标与保护目标运动态势图Fig.4 Moving situation of risk object and protected object
鼠标处纬经度:30°9.9′,120°18.5′位置与运动状态的实时监测,能探测敏感区域闯入目标,对数据序列挖掘和再分析,可以进一步识别异常目标的危险性,此算法亦可实现摄像头与雷达的自动联动,目标雷达和AIS位置点融合能实现目标身份识别,使系统对目标监控更加精确。监控系统与保护系统联动,可实现对警戒域内危险目标的联动拦截。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
现代苏州(2022年9期)2022-05-26
文萃报·周五版(2022年9期)2022-03-11
河北地质(2021年1期)2021-07-21
新世纪智能(高一语文)(2021年3期)2021-07-16
民用飞机设计与研究(2019年4期)2019-05-21
科技与创新(2016年22期)2017-03-30
电子制作(2017年24期)2017-02-02
求学·理科版(2016年3期)2016-03-23
中国交通信息化(2015年12期)2015-06-06