
大型电动挖掘机提升机构限位调试程序的改进
2015-12-17 14:07刘洋
企业导报 2015年24期
刘洋


摘 要:大型电动挖掘机的提升运行装置、推压运行装置都是通过限位极限来保护电机及机械部件,通过按装在减速机上的编码器的转动来检测传动机械的位置,从而通过电控方式实现对传动机械的减速,停止;以实现自动控制方式保护机械的目的。但是由于现场技术人员调试技能和经验不足,调试大型电动挖掘机的提升、推压运行装置往往会出现偏差,导致设备无法正常运行,而且对现场生产产生极大安全隐患。
关键词:电动挖掘机;提升运行装置;推压运行装置
前言:神华准格尔能源公司下属的两个露天矿共保有6台WK35型电动挖掘机,设备制造厂是太原重型机械设备公司,设备单斗装载土、岩等松散物料能力为35立方米,单台设备年生产能力可以达到700万立方米。[1] 首台WK35型电动挖掘机于2007年组装完毕并投入试运行。试运行初期设备厂家的工程师对提升运行装置的限位极限进行了多次调试、整定,但是一直没有彻底消除提升限位时有时无的故障缺陷,设备长时间不能正常运行。厂家技术人员虽然对提升机构的编码器、信号传输等通讯、电控装置进行了检查、更换,但始终未找出故障点。设备进行采掘生产作业时,完全依靠司机的操作经验来保护设备的提升机构,此问题成为安全生产的潜伏隐患。通过现场维修技术人员完善对提升限位调试程序,彻底解决了此问题,真正实现了通过电控方式对提升机构的保护,消除了设备的不安全运行因素,对设备制造厂有极大的借鉴意义。
一、设置限位的硬件设备简介
采用光电式绝对值编码器,是一种角度检测装置,它将输入轴的角度量,利用光电转换原理转换成相应的电脉冲或数字量,经过CPU程序处理后将角速度传递至逆变器执行单元。
SM338模板连接最多3个绝对值编码器(SSI)、1个数字量输入;提供位置编码器数值;24V(DC)输入电压;与CPU隔离;支持格雷码和二进制数码格式、带25位报文帧长度的编码器。限位设置方式流程图:
图1
二、调试前正确的软件设置及硬件连接
SM338模板通道“0”连接提升编码器,用于提升限位。用PC机通过STEP7软件对SM338POS-INPUT模板进行硬件组态,在“输入”选择对话框,对“0” 通道设置:绝对传感器为25位;代码类型为:二进制;“FREEZE”数字输入选择“关闭”;其它选择默认值。因为硬线连接“0”通道选择为提升限位;以上组态必须与编码器数据格式以及类型相匹配。具体详见图3所示。
图2 SM338模板组态软件设置图 图3 硬件连接线路图
三、调试时校验PLC程序
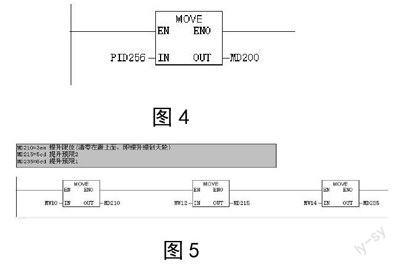
通过PID256读取提升卷筒编码器实际数值,PID256读取的实际数值通过“MOVE”命令传送到MD200。当动提升时,编码器随着提升卷筒转动,通过在线检测,可以读到MD200是一个连续变化的量,说明硬件连接以及编码器都没有问题,可以正常投入作用。
图4
图5
具体设置参数:MD210=3EE(提升限位)、MD215=5CD(提升预限位2)、MD35=6CD(提升预限1),是预设参数值,可根据实际使用情况进行调整。
从梯型图图6中可以看出,MD200的实际值和预设值进行比较,随着编码器转动,当MD200实际值小于设定值MD235,线圈M107.4使能,激活预限 1,提升实际给定值只能达到给定参数值的50%,当MD200实际值小于设定值MD215,线圈M107.1使能,激活预限2,提升实际给定值只能达到给定参数设定值的10%,当MD200实际值小于设定值MD210,线圈M107.0使能,激活限位,提升实际给定值为“0”,从而实现逐级减速,直到限位的目的。
图6 梯型图
四、变频器程序设置
程序的处理与运算最终是要过DP总线将运算结果传送到变频器,由变频器来执行,从而控制电机的转速。因此调试程序也必须对变频器参数进行程序设置。首先激活要使用的自由功能功:U950、U951、U952。其中,U951.59=6功能块被激活在时隙6中被处理;U952.37=6功能块被激活在时隙6中被处理;U951.31=6功能块被激活在时隙6中被处理。
其次要选择给定值。同样要激活自由功能U950功能块,即 U950.35=6、U950.36=6、 U950.37=6自由功能模块。
当U950.35=6自由功能参数U005=50 %,
当U950.36=6、自由功能参数U006=10%
当U950.37=6、自由功能参数U007=0%
U108.1=11实际给定值、U108.2=K0405乘法运算=K0468
U109.1=K0468、U109.2=K0406乘法运算=K0469
U110.1=K0469、U110.2=K0407乘法运算=K0470
主给定P443=K0470
总结:通过以上硬件配置、编程、参数设置,我们实现了对电机速度控制,达到了逐减速到限位的目的,从而可以从电气自动控制方式实现对提升机械进行保护功能,为设备安全运行起到可靠的保护。实现了通过变频器参数设置来执行减速、限位的功能。
参考文献:
[1] WK-35操作手册
[2] WK-35电气维护手册
