基于可视化编程的拉伸试验机系统设计
2015-12-17 07:13:02赵彩虹
现代制造技术与装备 2015年6期
万 轶 苏 铭 赵彩虹 陆 炜
(南京航空航天大学金城学院,南京 211156)
基于可视化编程的拉伸试验机系统设计
万 轶 苏 铭 赵彩虹 陆 炜
(南京航空航天大学金城学院,南京 211156)
本文设计了由单片机与PC组成的拉伸试验机的控制系统,介绍了机械本体结构的设计方案,通过机构仿真及有限元静力分析,得到试验机的受力集中位置,阐述了硬件电路的组成、软件设计方法和程序及数据采集和转换的方法。
可视化编程 单片机 数据采集 拉伸试验机
引言
拉伸试验机是用于测量各种(金属、非金属材料)零部件的强度和刚度的检测设备,广泛应用于机械制造、车辆制造、电力工程、金属材料等行业。本文利用传感器采集数据作为反馈进行控制,设计了基于单片机和可视化编程的拉伸试验机的控制系统。
1 总体方案设计
本文所研究的拉伸试验机主要由三部分组成:机械本体结构、数据采集系统和数据处理界面。通过步进电机提供拉力,将试样拉伸至一定伸长率,保持一定时间后消除残余应力,在下位机设计位移参数,其变形量可以转化成对位移的控制。通过PLC对力传感器和位移传感器信号进行控制处理,传给上位机进行分析拟合,可以实现对位移、速度、工作拉力的参数检测,最终求出零件的刚度。
2 机械本体结构设计及运动仿真
2.1 机械本体结构设计
机械本体主要起到配合运动形式和支撑运动空间的作用,其结构样式很大程度上反映和关联试验机的测试功能形式,其综合性能决定了试验机整机测试性能中关键指标的范围。本试验机的主体结构包括步进电机、减速器、丝杠螺母、基座、导轨、机身、位移传感器支撑架、夹具和尾座。具体结构见图1。
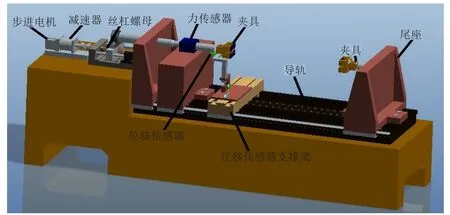
图1 机械本体总体结构
为了消除试样自重的影响,拉伸试验机整体采用卧式结构。动力原件为步进电机,由减速器减速后转换成丝杠的转动,通过丝杠与螺母的配合将转动转换成移动,利用螺纹联接带动前夹具的前后移动,后夹具可以根据零件长度进行调节,并用螺栓固定,以达到控制零件拉伸或压缩的动作。在力的传递过程中,作用在零件一端的力依靠丝杠螺母基座传递至机身,并通过尾座传递至导轨,使测量力的平衡力最终向机身传导。
试验中采用宁波柯力S型DEL力传感器,利用螺纹联接安装于夹具与连接轴之间(见图2);采用日本基恩士GT2-H12数字接触式位移传感器,利用套筒和螺母固定在支架上(见图3)。

图2 力传感器安装示意图

图3 位移传感器安装示意图
2.2 机械本体结构的运动仿真
机械本体结构装配完成后,在Pro/E机构仿真的模块下,利用ANSYS软件对关键零部件在机构中某一时刻的具体位置和受力状况进行分析。对机械结构中关键的受力连接件的应力集中区、位移变化量进行研究,验证其设计结构能否完成其预定的要求。总位移图如图4所示。
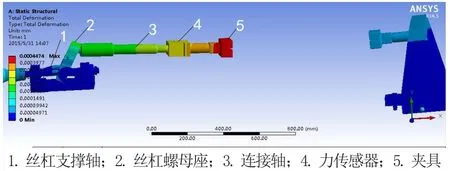
图4 总位移分析云图
试验机在拉伸试件过程中,丝杠螺母座-2由于受到翻转力矩的作用,会使丝杠支撑轴-1向上产生微小形变,且连接轴-3和丝杠螺母座-2之间也会发生微小变形。由于各部分变形量的累积,在夹具-5处的位移变化量达到最大值。而最大位移量为4.474m,大于位移传感器的最小测量值2m,故此次设计的拉伸试验机能满足对实验机拉伸精度方面的要求。
3 数据采集
拉伸试验机基于可编程控制器(PLC)进行数据采集和分析、硬件控制和通讯这三部分功能。采用Advantech型号为USB-4711A的USB数据采集卡,具有16个采集通道,采集速率达150kS/s,单次测量在1~2分钟内完成。
通过控制步进电机实现轴向拉伸,利用力传感器和位移传感器分别获得被测对象在外力作用下所受的拉力和由此产生的位移,PLC通过模拟量输入AIW0和AIW2来分别采集力和位移模拟量经A/D转换后的数字量。转换后的数字量与其对应的物理量间具有线性关系,利用PLC自带的Scale_I_to_R功能块实现模拟量到实际物理量间的转换,然后将转换后的力和位移值分别存储到变量存储区VD0和VD4中,最后同过通讯协议将采集到的数据传送给上位机,完成数据的采集工作。图5为传感器数据转换程序。

图5 数据转换程序
为确保系统运行中安全可靠,程序中必须编写限位保护程序。当设备上的运动件触碰到安装在导轨两端的限位开关时,PLC将会停止脉冲输出,使步进电机停止转动,由电机的旋转运动转换成的轴向拉/压动作也会随之停止,从而保证设备安全。
4 数据分析界面
PC机装载Windows XP操作系统,上位机软件的开发语言为C#,软件主要分为两层:测控应用软件层和通讯层。根据系统的功能,人机界面提供联机、波形设置、参数管理、数据分析、阀口控制、试验数据曲线显示等接口。用户通过这些接口将指令通过windows的消息机制传递给相应模块,同时,系统的运行情况也会经由各模块将相关消息反馈显示,例如:变形量、力值、夹头位置等状态。本设计系统的界面数据采用同步缓冲输入的方式,如图6所示,在一次时常为2分钟的测试中,所采集到的数据点能满足刚度测试的要求。这种方式易于编程实现,同时让采集速率的控制成为可能。
[1]张新杰,赵林,郑中强,等.基于有限元的海洋输油软管疲劳试验机的寿命分析[J].机械设计,2015,(7):61-64.
[2]牛雪娟,杨涛,杜宇,等.变刚度纤维曲线铺放复合材料层合板的有限元建模和拉伸特性分析[J].宇航材料工艺,2014,(4):19-25.
[3]单鸿波,徐方,孙志宏,等.管状复合材料拉伸性能测试及夹具原型系统[J].纺织学报,2013,(9):134-138.
[4]郭洪宝,王波,甄文强,等.2D-C/SiC复合材料开孔件拉伸强度有限元计算[J].复合材料学报,2014,(2):448-455.
[5]李凯,夏国明,左文香,等.材料试验机数据采集及控制系统[J].河北工程技术高等专科学校学报,2012,(4):38-41.
[6]朱江新,阳平,夏天,等.基于PCI-1711数据采集卡的拉力试验机实时控制系统[J].制造技术与机床,2010,(5):81-83.
Design of Tensile Testing Machine System Based on Visual Programming
WAN Yi, SU Ming, ZHAO Caihong, LU Wei
(Department of Mechanical & El ectrical E ngineering, Ji ncheng College,Nanjing University of Aeronautics & Astronautics, NanJing,211156)
In this paper, the control system of tensile testing machine was composed of single chip microcomputer and PC. The design scheme of mechanical s tructure was introduced, and the stress concentration position of the tes ting machine was obtained by means of mechanism simulation and finite elem ent analys is. The hardware circuit, software design method and program, and the method of data acquisition and conversion were described.
visual programming, single chip microcomputer, data collection, tensile testing machine
猜你喜欢
中国设备工程(2024年6期)2024-04-08 07:07:08
装备制造技术(2020年9期)2021-01-26 00:15:24
哈尔滨轴承(2020年2期)2020-11-06 09:22:28
哈尔滨轴承(2020年1期)2020-11-03 09:16:08
有色金属加工(2020年4期)2020-08-20 04:35:04
制造技术与机床(2019年11期)2019-12-04 05:50:26
福建质量管理(2018年20期)2018-11-14 04:42:46
深圳职业技术学院学报(2015年5期)2015-11-30 06:22:25
橡塑技术与装备(2015年7期)2015-07-03 12:17:50
机械制造与自动化(2014年1期)2014-03-01 04:21:45