基于FPGA的电机伺服器设计
2015-12-15 07:47肜瑶张真吕路静
电子设计工程 2015年10期
肜瑶,张真,吕路静
(黄河科技学院 河南 郑州 450063)
基于FPGA的电机伺服器设计
肜瑶,张真,吕路静
(黄河科技学院 河南 郑州 450063)
文中针对传统的8位单片机由于计算功能等条件限制和系统内部体系结构,在实现各种高效的控制算法和先进的电机控制理论时面临的着成本高,系统复杂程度高等问题。该设计采用模糊比例算法,即在大范围内采用模糊控制,以提高系统的动态响应速度,建立系统模型。通过现场可编程门阵列FPGA的数字电子系统对电机进行控制,以硬件电路算法实现算法程序,将原来的电路板级产品集成为芯片级产品,为电动机数字控制提供了一种新的有效方法。该设计的优点:低功耗,可靠性高,低成本。
电机;FPGA;功耗;模糊比例算法
随着工业电气化、自动控制和家电产品领域对电机控制产品的增加,对电机控制技术的要求也不断提高。传统的8位单片机由于计算功能等条件限制和系统内部体系结构,在实现各种高效的控制算法和先进的电机控制理论时遇到了挑战。使用高性能的数字信号处理器(DSP)来解决电机控制器不断增加的速度需求和计算量是目前最为普遍的做法。将一系列外围设备如脉冲调制发生器、数字信号处理器和A/D转换器集成在一起组成复杂的电机控制系统。这种方法有着成本高,系统复杂程度高等缺点。
所以电机控制器经历了从模拟控制器到数字控制器的发展。由于模拟器件的参数受外界影响较大,比如温度,湿度,因此精度比较差。然而数字控制器具有可靠性高、更改控制灵活、控制精度高、参数调整方便、对环境因素不敏感等优点。
随着EDA技术的发展,用基于现场可编程门阵列FPGA的数字电子系统对电机进行控制,这是实现电机数字控制器的一种有效方法。
1 系统的控制原理
1.1 电机调速控制原理
根据他励直流电动机的机械特性:

由公式可知电机的转速与电机的参数有关,可以通过改变电机的外加电压(U)、外串电阻(R)、和磁通(Φ)来改变电机的转速。
1)通过改变电阻R改变转速n的方法,这种方法过于麻烦,而且经济性不好,调速范围太小。
2)通过改变磁通来改变电动机的转速,这种调速方法调速范围过小,不适用于该系统。
3)通过改变电动机电枢外加电压的方法来调节转速。该方法可操作性强,调速范围大便于实现。综上所述,系统采用调压调速的方法。
1.2 PWM控制原理
随着微控制进入控制领域,以及新型的电力电子器件的不断出现,使的采用全控制的开关功率元器件进行脉冲调制PWM控制方式成为主流。这种控制方式很容易在微控制器中实现,从而为直流电动机控制数字化提供了契机[1]。
图1和图2分别为PWM控制原理图和输入/输出电压波形。
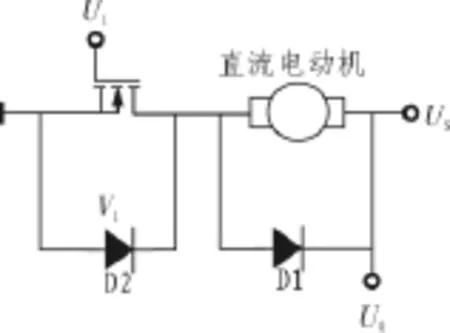
图1 PWM控制原理图Fig.1 PWM control principle diagram

图2 PWM控制电压波形图Fig.2 Voltage PWM control waveform figure
由图可知,当MOSFET的栅极输入电压为高电平时,开关管导通,直流电动机两端有电压Us。t1秒后,栅极输入电压变为低电平,开关管截止,电动机电枢两端电压为0,t2秒后,栅极输入电压重新变为高电平,开关管的动作重复前面的过程,电动机的电枢绕组两端的平均电压Uo为

式中,——α占空比。
由式可知,当电源电压一定时,电枢的端电压的平均值Uo由占空比决定,可以通过改变的大小,达到调速的目的。PWM调速的调整有3种方法:定宽调频法、调宽调频法和定频调宽法。其中,前两种方法需要改变脉冲频率,可能引起系统振荡。目前,在直流电机的控制中,主要是用定频调宽法,即保持频率不变,而同时改变t1和t2[2]。
2 算法设计
本设计采用模糊比例算法,即在大范围内采用模糊控制,以提高系统的动态响应速度;在小范围内采用比例控制,以提高系统的稳态控制精度。通过调整各项系数,使系统达到最优,即响应速度快、控制精度高。
同时引入前馈控制,前馈控制能有效提高系统对输入信号的响应速度,部分消除被控对象的积分滞后影响,从而使系统迅速消除偏差,并提高系统带宽。
2.1 电机模型建立
直流电机中空载转速为4 100 r/min,减速比为1/160,额定电压为56 V,额定电流不大于12 A,功率为500 W。忽略电枢电感及黏性阻尼系数,以电枢电压为输入变量,电机转速为输出变量的直流伺服电动机的传递函数可化简为:

2.2 模糊算法
当误差大于1.2 V时,采用模糊控制。模糊控制采用单输入,单输出结构,即以误差信号为输入信号,控制信号为输出信号。当误差大于1.2 V时,电机全速转动。
2.3 比例算法
比例算法的控制函数为:

式中,Kp—比例系数。
比例算法控制器的作用是成比例的反映控制系统的偏差信号error(t),偏差一旦产生,控制器立即产生控制作用,以减小偏差。
采用微处理器,需引入数字比例控制,即以一系列采样时刻点kT代表连续时间t,其中,T为采样周期,k为采样序号。代入上式后变为:

将T归一化为1后,可将u1(kT)简记为u1(k)。这样得到离散比例表达式:

2.4 系统模型的建立
根据系统模型,验证系统算法,在MATLAB的Simulink中建立系统算法理论模型。
实际算法实现过程中,发现不加人积分项,系统静差也为零,故最后实现方案时未采用PI算法,只采用了比例算法。
对于模糊算法,由于只在大范围内采用,而系统的细调则采用比例算法,因此为提高系统的响应速度,未对模糊控制范围进行分类,而是利用其控制思想,当指令与反馈误差大于一定值时,电机全速运行。实际控制中,也体现了这种算法的优点。引入前馈算法,是为提高响应速度,增加系统带宽,实际控制也证明了这一点。
最后需要说明的是,此仿真只能为实际控制参数的选取提供定性的指导,而不能提供定量的数据,所有最后确定的数据都是通过实验测试得到的。但仿真仍为算法的实现提供了很大的帮助,仿真中对参数的定性分析,最后都在实验中得到了验证。
3 硬件系统设计原理
直流电机伺服器硬件电路主要由FPGA控制器、数据采集电路、过流保护电路、隔离电路、驱动电路等组成。各个模块在中央控制器FPGA的控制下协调工作。
3.1 硬件电路机构图
直流电机伺服器硬件结构图如图3所示。
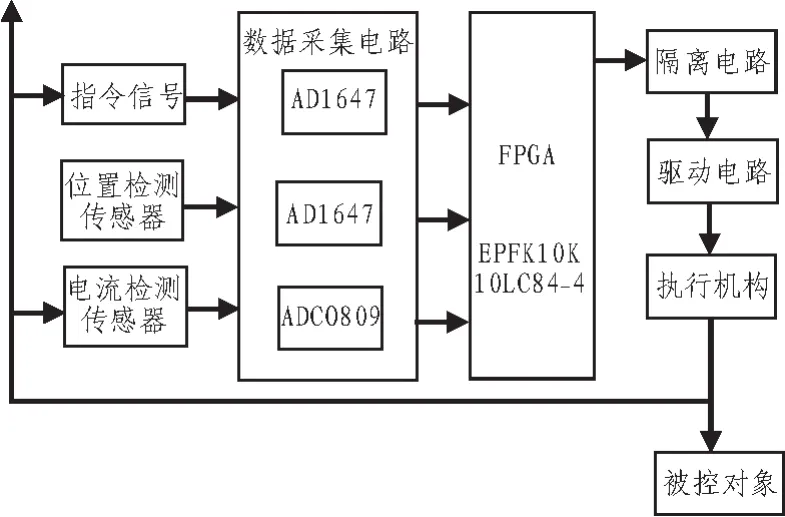
图3 电动机伺服器结构图Fig.3 Motor server structure
3.2 FPGA控制器
现场可编程门阵列 (Field Programmable Gate Array,FPGA)器件集成度高、体积小、具有通过用户编程实现专门应用的功能。使用FPGA器件可以大大缩短系统的研制周期,减小资金投入。更吸引人的是,采用FPGA器件可以将原来的电路板级产品集成为芯片级产品,从而降低了功耗,提高了可靠性,同时还可以很方便地对设计进行在线修改[3-9]。
本设计采用的可编程逻辑芯片为Altera公司的FLEX10K系列的EPF10K10LC84-4芯片,它具有高密度、低成本、低功耗、灵活的内部连接和强大的I/O引脚功能等特点。
4 系统软件设计原理
伺服驱动器系统软件能完成电机的正转、反转、停转、加减速等控制功能。
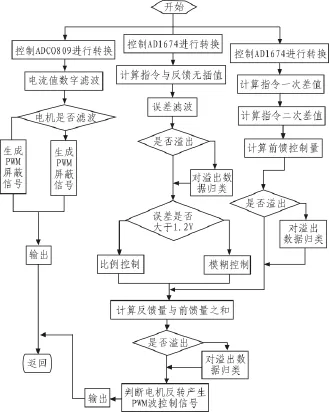
图4 系统图案件流程图Fig.4 System diagram case flow chart
在本系统中采用混合编辑法设计各个模块,采用VHDL语言描述各模块功能,系统软件流程图如图4所示。整个系统软件设计的电路图由AD1674控制模块、ADC0809控制模块、反馈控制模块、前馈控制模块和PWM波生成模块等组成。
5 结论
整个系统由数字电路、模拟电路构成,包含有强电、弱电电路元件,结构比较复杂,在设计过程中采取了不少保护措施,例如增加保护电路等,提高了系统的稳定性。所以,可以说目前硬件电路工作稳定、可靠,系统软件内部设置各种保护措施,控制芯片自身抗干扰能力强,系统在可靠性方面完全达到了设计要求。
采用高集成度芯片,保证了整个电路所采用外围器件较少,同时系统体积也较小,这样既减少了电路出现问题的排错时间,也降低了系统的维护难度,便于维护。
本系统的元器件完全符合国标及相关文件所规定的安全性要求,采用了高稳定、高可靠性的主芯片EPF10K10LC84-4FPGA芯片,安全性能良好。
[1]康华光.电子技术基础(数字部分)[M].北京:高等教育出版社, 2000.
[2]张素文.高频电子线路[M].北京:高等教育出版社,2004.
[3]徐志军.CPLD/FPGA的应用与开发[M].北京:电子工业出版社,2002.
[5]任爱锋,初秀琴,常存.基于FPGA的嵌入式系统设计[M].西安:西安电子科技大学出版社,2004.
[6]任晓东.CPLD/FPGA高级应用与开发指南[M].北京:电子工业出版社,2003.
[7]陈中孝,李艳芳,张立广.感应加热电源逆变控制器的设计[J].陕西电力,2012(8):34-37.CHEN Zhong-xiao,LI Yan-fang,ZHANG Li-guang.Hardware design of induction heating power inverter controller[J].Shaanxi Electric Power,2012(8):34-37.
[8]何小庆,杨训,徐皇清.数字化变电站IRIG-B码对时解码方案研究[J].陕西电力,2013(6):39-42.HE Xiao-qing,YANG Xun,XU Huang-qing.Analysis on clock synchronization of IRIG-B decoder scheme in digital substation[J].Shaanxi Electric Power,2013(6):39-42.
[9]牟树贞,赵海森,刘芹.供电电压不平衡时系统中周期性负荷能耗和温升的试验研究[J].陕西电力,2012(1):4-7.MOU Shu-zhen,ZHAO Hai-sen,LIU Qin.Influence of unbalance power supply on energy comsumption and temperature rising of cyclic load in power system[J].Shaanxi Electric Power,2012(1):4-7.
Design of the servo motor based on the FPGA
TONG Yao,ZHANG Zhen,LV Lu-jing
(Huanghe S&T College,Zhengzhou 450063,China)
This article in view of the traditional 8-bit MCU due to constraints such as computing functions and system architecture,in the implementation of effective control algorithm and the advanced motor control theory in the period of high cost, high system complexity.This design this design adopts the fuzzy proportional algorithm,the fuzzy control in large scale,in order to improve the system dynamic response speed of the system model is established.Through the field programmable gate array FPGA digital electronic system to control the motor,with hardware circuit implementation algorithm program,the original integration for chip-level circuit board level products,digital control for motor provides a new effective method.The design of advantages:low power consumption,high reliability,low cost.
electric machinery;FPGA;power waste;fuzzy proportional algorithm
TN919
A
1674-6236(2015)10-0072-03
2014-08-29 稿件编号:201408182
郑州市无线与移动通信网络应用技术创新团队项目(121PCXTD511)
肜 瑶(1980—),女,河南南阳人,硕士,讲师。研究方向:电子信息工程、仪器仪表科学与技术。
猜你喜欢
弹道学报(2022年3期)2022-10-08
电子设计工程(2022年15期)2022-08-17
火力与指挥控制(2022年5期)2022-07-25
煤气与热力(2021年12期)2022-01-19
弹箭与制导学报(2020年1期)2020-07-09
光通信研究(2020年2期)2020-06-15
弹箭与制导学报(2019年6期)2019-06-24
科技创新与应用(2019年17期)2019-06-09
筑路机械与施工机械化(2014年4期)2014-03-01
自动化博览(2014年9期)2014-02-28