电动机调压节能控制系统控制策略的研究
2015-12-15 10:45:12梁福波郭文科拜润卿梁琛
电气自动化 2015年1期
梁福波,郭文科,拜润卿,梁琛
(国网甘肃省电力科学研究院,甘肃 兰州 730050)
0 引言
目前,电动机作为机械设备的动力装置应用范围非常广泛。尤其是异步电动机在工矿、油田等行业是必不可少的拖动装置,而这些企业耗能比较严重,为了满足机电设备启动和安全运行的要求,电动机容量选择须留有足够余量,因而不可避免地存在“大马拉小车”的现象,不需要调速的机械设备也比较多[1-4]。鼠笼型异步电机由于起动力矩很大,导致异步电机在许多场合都处于轻负载的状态下工作,从而引起电动机负载率低,功率因数低,浪费电能严重的问题[5-6]。据统计,在电动机系统中存在20% ~40%的情况是空载或轻载运行,大量电能被浪费。随着半导体功率器件性能不断完善、发展,性价比不断提高,大范围推广先进的节能技术的硬件条件已经具备[7-8]。随着国家对于节能问题非常重视,尤其看重工矿、油田等行业的节电。近年来我国油田、工矿等企业的自动化水平在不断提高,应用了许多高新技术,基于电力电子技术的电动机节能控制系统已具备了应用条件。
1 控制装置结构
补偿式交流电压跟踪控制装置简化原理图如图1所示,由主电路和控制电路两部分组成。主电路如图2所示,由EPWM桥式逆变电路、桥式整流电路、输出补偿变压器Tr和输出交流滤波电路L、C组成。

图1 电动机调压节能控制装置简化原理图
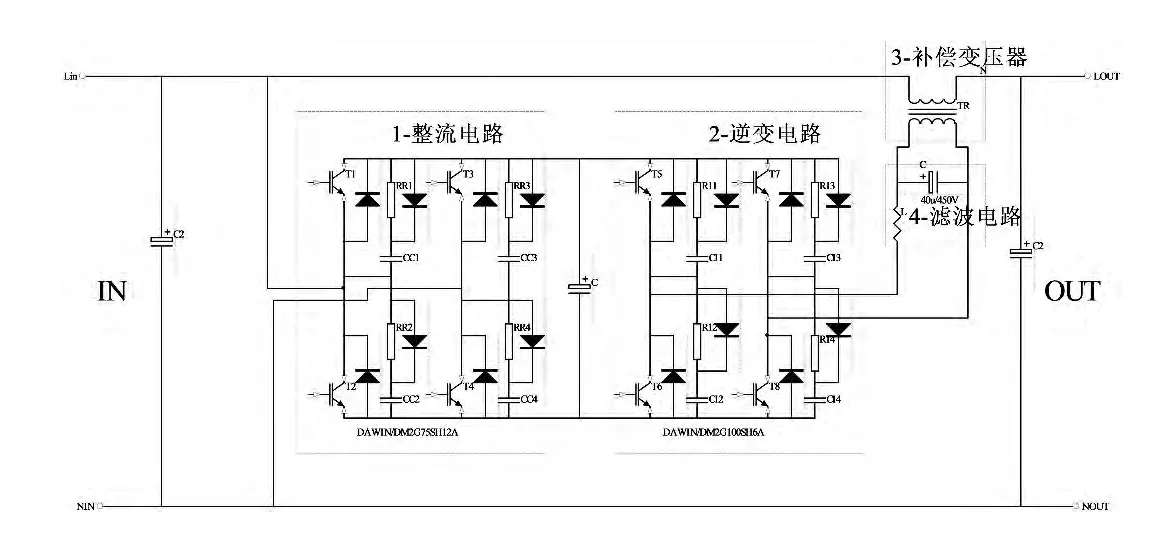
图2 主电路结构图
EPWM桥式2-逆变电路T5~T8工作在桥式斩波器状态。由它的EPWM工作方式、直流电源电压波形和直流电容C值的大小及其功能来区分的。
补偿式交流电压跟踪控制装置的控制电路,是由采样控制保护电路、EPWM波生成电路、整流逆变驱动电路等组成。
2 PWM逆变器控制策略研究
2.1 控制方式选择
当PWM逆变器作为电压跟踪控制装置的主电路应用时,逆变器产生的补偿量,应实时地跟踪其基准指令信号的变化,要求PWM逆变器有很好的实时性,因此装置中采用了跟踪型PWM控制方式,跟踪型的共有特点是属于闭环控制。较实用的跟踪型PWM控制法有两种[9-11],既瞬时值滞环比较方式和三角波比较方式。
三角波比较方式与传统用三角波作为载波的SPWM控制方式不同,它不直接将指令信号与三角波进行比较,而是将指令信号与补偿量信号的误差值,经过放大器之后再与三角波进行比较。放大器往往采用比例放大器或比例积分(PI)放大器。这样组成的控制系统是基于把补偿量的误差值控制到最小来进行设计的。但硬件设计相对复杂[12-14]。
在本控制装置中,因为想要达到无级调节电压跟踪控制、带任意负载跟踪、功率因数高、谐波少、精度高的目标,所以设计采用三角波比较方式,其中放大器设计成PID调节器作用。
2.2 PID调节器设计研究
由于系统设计的是一个纯电子电路单闭环系统,要实现串联校正,电压的无级调节,常用运算放大器组成的PI(或滞后),PD(或领先),PID(或滞后-领先)三类调节。因为要带电机负载,有很大的裕量变化,需要微分控制,所以设计中采用PID闭环控制方式对PWM脉宽进行调节。
2.2.1 设计电路分析
在实际电路设计中,需要考虑信号干扰,脉冲幅度限制等问题,本系统中设计PID调节器如图3所示。
由图3可知,运放反相输入端,即点O,输入给定信号电压Ur和反馈信号Uf两者进行比较,其偏差量ΔU对反馈电容Cn进行充电或放电,电阻R0和电容Cdn组成微分反馈可以防止超调,提高动态抗干扰性。同时反馈微分电路带有滤波环节,防止纯微分引入的干扰。电阻Rdn起到一定的限流作用。基准输入端设计R0/2和C0组成的给定滤波电路。Rb为补偿电阻,以保证集成运放输入级差分放大电路的对称性,其值为Rb的值等于R0与Rn并联后的值。D1、D2为3 V稳压管,作为限幅电路对其输出最大电压进行限幅,保证电器设备和机械设备的安全。

图3 系统PID调节器电路设计
在此电路中由于是负反馈,可以应用“虚短”“虚断”的概念,所以对图3中各支路电流(假定电流方向向右),用拉氏变换表示为:
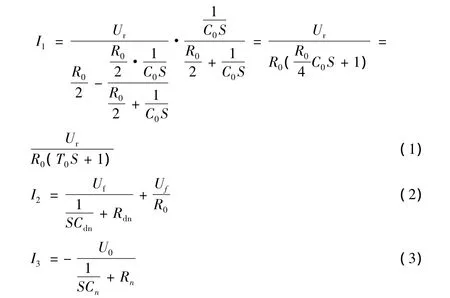
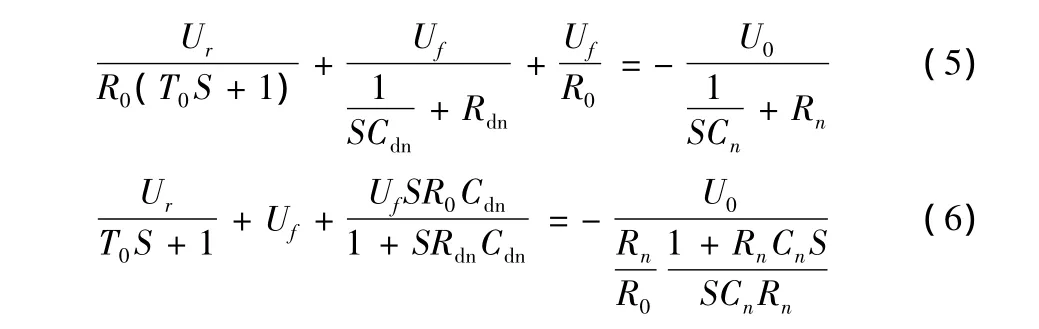
根据基尔霍夫电流定律,虚地点O的电流平衡方程为:

即:
上式中τn=RnCn—PI调节器的领先时间参数;
τdn=R0Cdn—微分时间常数;
Todn=RdnCdn—微分滤波时间常数;
T0=R0C0/4—电流滤波时间常数
则式(6)为:

设系统被控环节传递函数为G(S),则系统动态框图如图4。
图4中当Uf=0时图示为比例积分调节器,其传递函数为

式中Kn=Rn/R0,进一步简化:

图4 系统动态框图

式中 τn=RnCn,Ki=Kn/τn
Kn为比例放大作用,Ki相当于以Kn为积分的增益系数的积分作用,二者合成比例积分控制。
2.2.2 参数整定与仿真
本文设计一个合理的自动控制器,需要对各电阻电容进行合理选择。设计中采用经验数据法确定PID参数,把比例、积分、微分参数确定在一定范围内,然后使用试凑法测出最优参数搭配。
由于采用的是纯电子电路设计方法,使用Multisim电子电路设计仿真软件,在仿真设计中搭建完成全部设计电路进行仿真调试。
参照类似系统,经过一定理论分析与计算,估算出近似值,然后在实际调试中进行必要的修正。以正补偿为例仿真图如图5所示。

图5 PID调节器输出仿真曲线
从图5中可以看出反馈中滤波环节对改变微分作用的强弱有一定的影响。在系统中更看重跟踪电压的稳定性,所以要求超调比较小,在图(c)中上升速度相对缓慢,但其达到稳定时间比较快速约2.2 ms,完全符合设计要求。
在电路仿真输出中,只是获得了一个相对较理想的结果,把数据确定于一定范围内,实际安装焊接的数据可以在实际装置中进行调试。
3 结束语
由于电动机的广泛应用,电动机节能装置的研究已经日趋成熟,本文主要研究了补偿式交流电压跟踪控制系统控制策略,选用三角波比较控制方式,设计了本装置使用的PWM三角波闭环控制方式。控制环节的关键PID调节器设计,设计了PID调节器电路及其S域计算,并通过试凑法和经验法相结合的方法对PID参数进行整定。通过对控制方式及PID调节器设计的研究论证,从电路仿真输出结果看,完全符合设计的要求。
[1]刘春,韩如成,张守玉.无功补偿装置的现状和发展趋势[J].太原重型机械学院学报,2004,25(1):30-33.
[2]李秀卿,盛文利.异步电动机电子节能器[J].华北电力技术,1999,29(8):28-30.
[3]孙向东,任碧莹,钟彦儒.恒定功率因数节能方法在VVVF变频调速器中的应用[J].电气传动,2003,20(2):8-10.
[4]于励鹏,朱荣花,庞元俊.电动机负载调节装置的研究与应用[J].工矿自动化,2006,30(4):9-11.
[5]禹成七,于洪军,阎增奎,等.电动机功率因数控制器的研究与设计[J].华北电力大学学报,1998,25(4):36-41.
[6]王广林,敬淑义,李志杰,等.感应电动机随动功率因数法节电控制的研究[J].节能技术,2003,21(1):5-6.
[7]徐方逸.三相交流异步电动机节电运行的新方法-最小输入功率法[C].第四届中国交流电机调速传动学术会议论文集,1995.
[8]孙云莲,陈允平.不均匀负荷异步电动机最优节能调压研究[J].武汉水利电力大学学报,2000,33(3):73-76.
[9]李东仓,吕振肃,杨磊.串联谐振并联输出IGBT逆变器研究[J].电力电子技术,2000,20(2):16-18.
[10]READ J C.The calculation of rectifier and converter performance characteristics[J].Journal IEF,1945,92(11):495-590.
[11]SUTTICHAI SAETIE,DAVID A,TORREY.Fuzzy logic control of a space-vector PWM current regulator for three-phase power converters[J].IEEE Transactions on Industrial Electronics,1998,13(3):419-426.
[12]马振国,李鹏,赵保利,等.DVR电压波形跟踪无差拍控制方法[J].电力自动化设备学报.2005,35(3):33-36.
[13]KAMPAM FAND HABETLER T G.Combined deadbeat control of a serier-parallel converter combination used as a universal power filter[J].Transactions on Power Electronics,1998,13(1):160-168.
[14]HAMASAKL S and KAWAMURA A.Improvement of current regulation ofline-current-detection-type active filter based on deadbeat control[J].Transactionson Industry Applications,2003,39(2):536-541.
猜你喜欢
防爆电机(2021年4期)2021-07-28 07:42:56
上海大中型电机(2021年2期)2021-07-21 03:01:32
数学物理学报(2021年2期)2021-06-09 08:54:26
数学物理学报(2019年5期)2019-11-29 07:46:34
广东技术师范大学学报(2016年5期)2016-08-22 09:07:22
智能建筑电气技术(2015年5期)2015-12-10 05:52:25
智能建筑电气技术(2015年5期)2015-12-10 05:52:20
电源技术(2015年9期)2015-06-05 09:36:06
哈尔滨师范大学自然科学学报(2015年1期)2015-04-19 06:55:30
电测与仪表(2015年20期)2015-04-09 11:53:48