
掩体式防拖潜标探测装置的设计与研究
2015-12-15 03:35:18徐如彦杨青军王俊勤李家刚刘在科吴海京周杨锐任世炎
海洋科学 2015年3期
徐如彦, 沈 宁, 杨青军, 王俊勤, 李家刚, 刘在科, 吴海京, 张 杰,周杨锐, 任世炎
(1.中国科学院海洋研究所, 山东 青岛 266071; 2.中海石油(中国)有限公司研究总院, 北京 100027; 3.中海油服物探事业部工程勘察中心, 天津 300451)
随着海洋科学研究、海洋资源开发和国防事业不断发展的需要, 潜标系统的应用日益广泛。如何改进潜标的测量技术和方法, 已成为广大海洋科技工作者的共识[1-2]。
多年来, 海洋渔业、海洋运输、海洋开发等各种海洋活动, 是影响海洋环境连续观测与质量的最主要因素,是观测仪器设备受到损坏的祸首之一, 又是影响海上潜标测量质量以及导致海洋观测仪器丢失的主要根源, 特别是在浅海水域, 更是防不胜防、束手无策。
预防和解决海洋环境连续观测的防拖问题, 是世界各国海洋科学家共同面临的世纪难题。针对浅海区海上潜标、观测仪器的损失与破坏, 各国海洋科学工作者进行了长期不懈的努力与探讨。到目前为止还没有一种有效可行的方法。
本研究于2012年, 在世界各国各种结构潜标探测技术的基础上 , 完成最初样本, 后经不断改进和完善, 从更深层次的角度, 设计出了掩体式防拖潜标探测装置, 该装置是目前预防和解决防拖的一种可行方法。有望解决科学家共同面对的海洋观测防拖疑难问题[3-4]。
1 掩体式防拖潜标探测装置设计原理
掩体式防拖框架内可容纳放置整个潜标测量系统。将仪器设备、释放器预置到连载浮体内。首先将仪器设备的高度改造为不超过40 cm, 然后将连体潜标的总体高度设计为40 cm。875D型释放器高度不超过50 cm; 865A型释放器需要改造, 它的高度为65 cm, 根据需要可去除它上端7 cm高的把手, 下端的拖钩部分, 设计为15 cm高的、一头带尖的防泥及保护脱钩的钢管, 该钢管靠掩体的自重沉入海床以下15 cm。因此, 掩体重量视海底地质结构条件而定。该保护脱钩的钢管已在中国大部分海域靠自重完成入泥深度至海床下15 cm。
对仪器外型及框架整体改造后, 防拖仪器、释放器、整体框架的高度为 40 cm, 潜标上面离海底的高度只有40 cm, 从而使潜标探测装置起到了理想的防拖效果。
该装置将整套集成潜标的测量系统全部密封在掩体内, 构成掩体式防拖体, 该探测装置的浮体内可合成美国产ADCP600型与ADCP300型多谱勒剖面海流计、水位计、水温仪、盐度仪······等水文测量仪器。可进行浅海区剖面海流、水位、底层水温, 盐度等诸多水文要素的测量。
该装置中防拖弧形架子的中间可放置仪器设备,以达到尽可能地避免和防止渔船拖网。掩体式防拖潜标探测装置示意图见图1。文献[5-6]虽然通过表面浮标实时传输测量数据, 但它是采用有缆浮标锚定测量方式。而本文最大的不同是无缆绳观测, 从有缆到无缆观测从根本上改变了测量方式与方法。
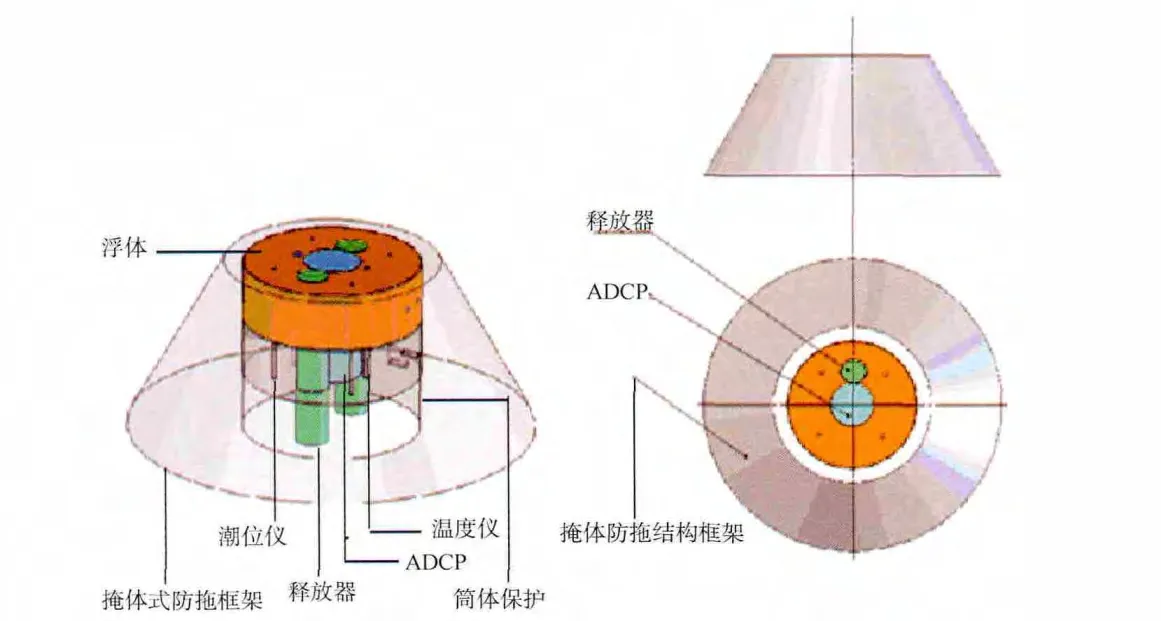
图1 掩体式防拖潜标探测装置示意图Fig.1 Diagram of the anti-dragging blockhouse submerged buoy
2 掩体式防拖潜标探测装置的结构
掩体式防拖潜标探测装置由掩体式防拖框架、筒体保护装置、浮体组件三部分组成(见图1)。
2.1 掩体式防拖框架
防拖框架分为水泥混凝土与钢结构 2种, 圆形与方棱形2种。
掩体形状为弧形, 整个掩体表层为光滑的, 弧形坡度的角度至少应在 40°范围内, 最理想效果是35°, 其高度均为40 cm。
2.1.1 掩体式混凝土框架
掩体式混凝土框架由钢筋混凝土浇注而成。混凝土构造框架结构内的预留空间, 需要根据浮体的体积而定, 预留空间可足以容纳整套潜标测量系统。按以上设计再浇注水泥、沙子、石子合成混凝土构筑而成。
混凝土框架构造由基座与掩体二部分组成, 为了运输和装载方便, 使用时再用螺栓组成一体。该框架重量视海区底质条件而定, 分别为100, 200, 300 kg, 直至 1 t···不等。
2.1.2 掩体式钢结构框架
掩体结构构造框架可选用各种不同金属材料制作, 不锈钢材料为最佳选择。不锈钢结构框架外形为弧形, 掩体形状表面光滑。框架内部可容纳整套测量连体潜标加载的测量仪器设备。钢结构底部需加配重块, 用预制的水泥条块或预先预制好的条形或其他材料作为配重, 固定在框架的底部或周围。重量可视水深和海床硬度而定。配重为100, 200, 300 kg, 直至 1 t···不等。
2.2 筒体保护装置
因掩体式防拖潜标探测装置中钢结构框架的配重水泥条块或水泥板, 基本是处在架子的底部和周围, 钢结构掩体框架与混凝土掩体框架内的剩余空间大于潜标浮体外径, 因此掩体式防拖潜标装置内同样需要采用筒体保护装置 。文献[7-9]使用的是有缆绳锚定浮标观测、绷紧形单点锚定潜标系统测量方法, 本文是无缆绳观测, 从有缆到无缆观测是从根本上改变了测量方式与方法。
筒体保护是由不锈钢板或塑料板制作成的圆柱体、方形体。上端端口是敞开式的, 下端端口视地质条件而定, 多为半封闭式或封闭式的。根据测量潜标系统外径大小预做一个大于浮体潜标外径的不锈钢圆柱体或方形柱体, 以保证仪器设备处在正常工作状态及顺利释放浮出水面。
筒体保护装置, 可防止外力对浮标的作用; 避免潜标因海区海床软泥地质而沉降、浮体进入软泥而不能顺利升浮; 使仪器设备测量系统释放装置顺利升浮; 避免潜标受掩体式防拖框架内壁的阻力及避免释放器吊钩挂在钢结构上面; 因潜标受底流、台风流、内波流等的影响, 造成潜标测量装置倾斜、摇摆、不稳定, 以致影响测量质量, 而筒体保护装置解决了这些难题。
2.3 浮体组件
2.3.1 浮体组件构造
浮体采用玻璃维珠材料制作而成。制作浮体时,首先根据仪器设备大小、重量在浮体内预留放置仪器的空间, 然后在浮体内加载仪器设备, 组合成为潜标测量单元。每块浮体预制成浮力重为20, 30, 或40 kg···不等的圆柱体或其他柱状体。使用时, 浮体的数量视仪器设备的重量而定。将仪器固定在预先做好的潜标预留孔内, 构成潜标测量浮体。浮体放置在掩体式混凝土框架或钢结构框架内, 见图2。
2.3.2 潜标浮力计算
潜标浮力计算[10-11]:
r1=255 mm,r2=105 mm;r3=68 mm;r4=7.5 mm;H=190 mm

图2 浮体组件构造图Fig.2 Structure of the floating components
H表示浮体高度。
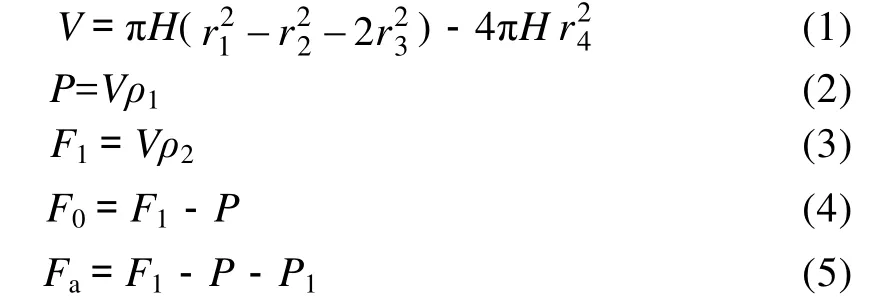
V表示浮体体积, 单位为kg/m3;P表示潜标重量, 单位为 kg;ρ1表示浮体密度,ρ2表示海水密度,ρ1=500 kg/m3,ρ2=1 025 kg/m3;F1表示潜标浮力, 单位为kg;F0表示浮体的净浮力;P1表示仪器重量;Fa为浮体减去仪器重量的净浮力。
由公式(1)至(5)计算得出, 预留孔为单释放器时潜标的净浮力为29.7 kg。单孔潜标系统净浮力为10 kg。
2.3.3 潜标升浮时间及受力计算
潜标在上浮过程中, 会受到重力、浮力、水流作用力。浮力大于重力, 即净浮力大于0, 则潜标上浮;浮力小于重力, 即净浮力小于 0, 则潜标下沉。在潜标上浮初期, 在净浮力作用下潜标加速上浮, 为防止潜标向上运动, 在潜标上必须有一个力与流体质点所施的力大小相等, 方向相反, 这个力就是上升阻力。随着速度的增加, 其上升阻力也增加, 最后与净浮力大小相等, 方向相反, 作用在浮体上的力达到平衡, 这时, 潜标以恒定的速度上升, 直到水面[11]。
潜标外形为半球体和圆柱体组合而成, 在上升过程中, 潜标姿态保持不变, 可认为迎流面为近似半球体, 迎流投影面积为球体截面积[11-13],A=πr2,r为潜标半径。
根据现有潜标尺寸及表面材质, 得知潜标的阻力系数C=0.4。
上升阻力大小为
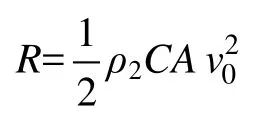
ν0表示上升速度(m/s);R表示上升阻力(kPa)。极限速度计算:
当潜标以恒定速度上升时, 作用力平衡为
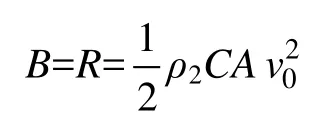
B表示浮球浮力。
潜标上升极限速度为
根据本试验, 可以计算出浮球上升的极限速度为0.67 m/s, 即浮球稳定上升速度为0.67 m/s。
根据上述条件, 可以计算出潜标上升时间,

t表示潜标上升时间;h表示水深。
由上述公式计算出表1的结果。
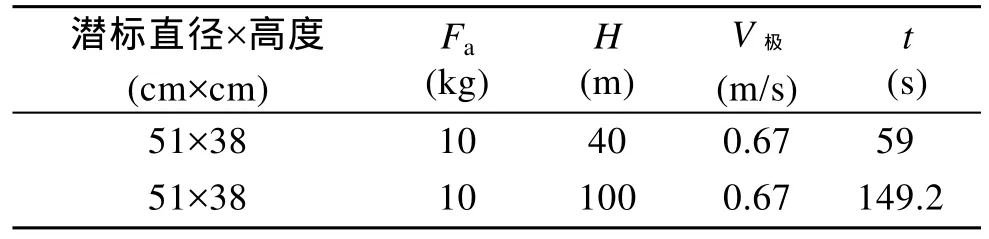
表1 潜标不同布放深度的升浮时间Tab.1 The timing of release of submersible buoy at different depths
3 掩体式防拖潜标探测装置海上投放与回收
于2014年3~7月在南海(水深100 m), 2014年6~9月在渤海曹妃甸、蓬莱油田开发区(水深20~40 m)进行投放与回收, 本装置适用于浅海海区水深230 m且底质不是软泥的、较为平坦的海域。投放与回收是在恶劣的海洋环境条件下, 无人值守, 长期、连续、自动地监测下进行的。
3.1 投放
掩体式防拖潜标探测装置在海上的投放, 可以在渔船、工程船、拖船等上进行。先把掩体式防拖潜标探测装置吊挂在船舷外, 然后让该装置自由落体沉入海底。该装置搭载了释放器、美国产 300k ADCP、日本产 ELC单点海流计、水位计、水温仪等。也可加配其他测量仪器。海上投放示意图见图3。
3.2 回收
用渔船对该装置进行回收, 已多次成功回收,有效预防和解决了测量仪器受各类船只航行作业干扰、破坏等难题, 获取了大量的实测剖面海流资料,水位资料, 温度、盐度资料。实验结果良好。
平流回收时, 潜标测量系统回收升浮时间约为1 min。在涨、落潮时, 回收升浮时间约为不超过2 min。由此看出涨、落潮对上升时间和平移距离影响很小,平移距离为20 m左右。

图3 掩体式防拖潜标探测装置海上投放示意图Fig.3 Diagram of deployment of the blockhouse anti-dragging submerged buoy measurement device
该装置在海上的投放与回收, 均不带系留绳,是目前国内外潜标防拖的一种最佳装置。该装置应用在中国海域的浅水区, 在平流、平潮期间回收更为理想。
4 小结
于2012年完成最初样本, 后经不断改进和完善,从更深层次的角度, 设计出了掩体式防拖潜标探测装置, 到目前为止, 本设计是比较理想的。本装置于 2014年 3~7月在南海(水深 100 m),2014年6~9月在渤海曹妃甸、蓬莱油田开发区(水深20~40 m)进行投放与回收。实验结果良好。本装置能够避免被渔网、流网拖走, 可长期隐蔽在水中, 防拖潜标系统可以在恶劣的海洋环境条件下, 无人值守, 长期、连续、自动地对海洋环境进行监测。具有其他调查方法无法代替的作用。本装置有望解决多年来海流、潮位、水温、盐度测量剖面悬而未决的难题, 为今后海洋水文环境观测开辟了一个崭新的途径。
[1]倪佐涛, 姜静波, 徐永平, 等.一种用于石油平台的有缆潜标系统的设计与布放方法[J].海洋科学, 2012,36(12): 81-83.
[2]刘素花, 李思忍, 徐永平.基于单片机和模糊控制的潜标自动防碰撞系统[J].海洋科学, 2010, 34(10):57-61.
[3]兰志刚.平台基有缆潜标实时内波监测系统[J].海洋科学, 2012, 36(12): 76-80.
[4]王士榜, 孙寿昌.测流潜标系统中仪器架的改进[J].海洋科学, 1985, 9(5): 50.
[5]兰志刚, 龚德俊, 刘育丰, 等.一种简易的潜标辅助寻标定位系统[J].海洋科学, 2006, 30(12): 1-4.
[6]赵忠生, 袁志伟, 黄磊, 等.深海潜标ADCP的实时数据传输[J].海洋科学, 2012, 36(8): 94-97.
[7]王婷.国外海洋潜标系统的发展[J].声学技术, 2011,30(3): 324-326.
[8]李飞权, 张先明, 张鹏, 等.海洋潜标系统的设计和应用[J].海洋技术, 2004, 23(1): 19-21.
[9]杨坤汉, 王明午.绷紧型单点锚定潜标系统布放回收操作方法[J].海洋技术, 1989, 8(1): 52-53.
[10]王明午.海洋潜标系统的静力分析和姿态计算[J].海洋技术, 2001, 20(4): 42-43.
[11]徐如彦, 沈宁, 倪佐涛, 等.自升式连体潜标测量系统的设计与实施[J].海洋科学, 2014, 38(12): 93-97.
[12]朱刚, 杜月中.波浪作用下潜标拖缆动力学分析[J].海洋工程, 2007, 25(4): 15-20.
[13]郭飞, 盛岩峰, 何红辉, 等.浅海环境观测专用潜标和潜标锚泊系统的研究[J].海洋技术, 2000, 19(2): 7-12.
猜你喜欢
科教新报(2024年2期)2024-03-17 09:48:23
人民长江(2023年6期)2023-07-25 12:24:14
军事文摘(2023年12期)2023-06-12 07:51:06
地质装备(2021年2期)2021-04-23 07:33:52
舰船科学技术(2021年12期)2021-03-29 01:28:12
水利与建筑工程学报(2018年4期)2018-08-21 07:47:54
东西南北(2018年8期)2018-06-02 02:56:02
环球时报(2017-12-11)2017-12-11 05:11:35
海洋科学(2014年12期)2014-12-15 03:35:04
声学技术(2014年2期)2014-06-21 06:59:04
