踝关节运动辅助矫正机构的结构设计
2015-12-15 08:32:22李高卫,梅瑛,尹姣姣
徐州工程学院学报(自然科学版) 2015年2期
通讯作者:梅瑛(1964-),女,山西太原人,教授,硕士生导师,主要从事机械设计与优化研究.
踝关节运动辅助矫正机构的结构设计
李高卫,梅瑛,尹姣姣
(中北大学 机械与动力工程学院,山西 太原030051)
摘要:文章以剖析人体下肢解剖学理论为依据,设计了一种基于空间并联机构原理的新型下肢踝关节运动矫正机构.按照正常人体下肢基本尺寸范围,对下肢运动矫正机构的结构进行数学建模并做了运动学仿真分析,验证了该并联机构可以有效辅助运动障碍者恢复健康.该机构结构简单、工作空间较大、刚度大,可以适用不同群体.
关键词:运动矫正机构;工作空间;位置正解;位置逆解
收稿日期:2015-01-05
基金项目:国家自然科学
作者简介:李高卫(1987-),男,河北邯郸人,硕士研究生,主要从事机械机构及机器人设计与研究.
中图分类号:TH112文献标志码:A
中国已经进入老龄化社会,有肢体运动障碍的人也在增加,将机器人学应用于运动矫正医学领域已经被国内外专家学者所认同[1].下肢运动障碍者不能正常行走的一个重要原因是肢体承重能力下降[2],有的患者使用减重带悬吊减重,或利用跑步机带动下肢被动式运动[3].临床应用效果不错的可调式运动矫正练习机器人,被专家学者普遍认可[4].利用重心轨迹自动控制平衡掉人体一部分重力,也可以减轻患者行走过程中体质量带来的负担[5].东北大学研发的异构双腿行走机器人,可用于研究人腿与智能腿之间的协调问题[6].德国自由大学采用双曲柄摇杆机构研发的下肢运动矫正机构,结构简单,但对盆骨运动得不到有效控制[7].
虽然以上康复机构的研究成果给患者的运动矫正带来了良好效果,但仍然存在一些不足之处:功能单一,根本无法实现复杂运动;功能练习比较被动,工作空间相对较小,刚度不足等.
为此,本文设计出了一种新机构,它一方面能做刚性练习,另一方面还能做柔性练习,从而使患者下肢能得到更有效的训练.
1 人体运动学基础
设计下肢运动矫正机构,前提是要使其符合人体运动学的自然规律.人体行走分为单脚阶段支持、双脚阶段支持和有一脚处于冗余状态的双脚支持.经过如此的简化,在机械结构设计上更能实现人体正常步态.
人体下肢骨骼主要由趾骨、跗骨构架、腓骨、胫骨、髌骨和股骨等构成.下肢有7个自由度,3个枢纽关节,包括2个球副枢纽关节,1个扭转副枢纽关节.最为复杂的是踝关节,由腓骨、胫骨、跗骨构架等组成,胫骨和腓骨组成3自由度旋转的自由端,实现足部侧翻、翻转、旋转、倾斜和后弓的运动.
2 踝关节运动矫正机构的设计及运动学分析
2.1并联机构构造与自由度分析
2.1.1并联机构结构

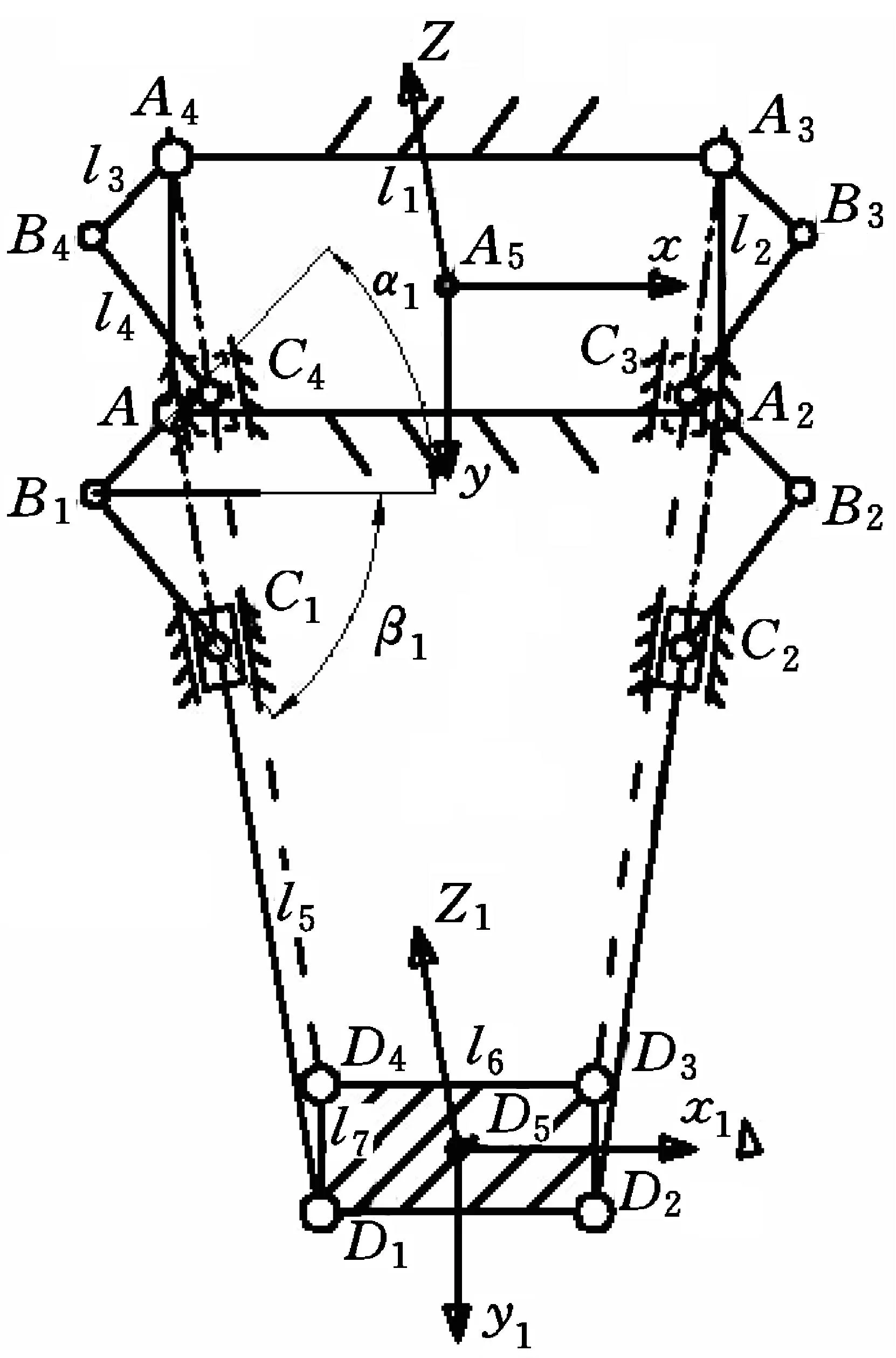
图1 踝关节康复机构原理图
A1=(-l1/2,l2/2,0),
A2=(l1/2,l2/2,0),
A3=(l1/2,-l2/2,0),
A4=(-l1/2,-l2/2,0),
O=(0,0,0).
动支点在O—XYZ坐标系中的坐标分别为
D1=(-l6/2,-l7/2,-l3sinα1-l4sinβ1-l5),
D2=(l6/2,l7/2,-l3sinα2-l4sinβ2-l5),
D3=(l6/2,-l7/2,-l3sinα3-l4sinβ3-l5),
D4=(-l6/2,-l7/2,-l3sinα4-l4sinβ4-l5).
2.1.2并联机构自由度
空间并联机构自由度计算公式为
(1)
式中:F为自由度,F0为冗余自由度,fi为第i个运动副的自由度,g为运动副,k为活动构件.
空间并联机构(图1)有13个活动构件,16个球面副,4个移动副,没有冗余自由度数.可计算出并联机构有4个自由度,动平台(D1、D2、D3、D4)可实现绕X、Y、Z轴的旋转,可沿着Z轴移动.
2.2位置逆解分析
4自由度并联机构动平台在空间的位置参数给定,求出4个曲柄滑块机构的输出角度,即求位置逆解.在图1中,A1、D1两点之间的间隔记为h1,A2、D2两点之间的间隔记为h2,A3、D3两点之间的间隔记为h3,A4、D4两点之间的间隔记为h4.设h1、h2、h3、h4中最小值为基值h,D1、D2、D3、D4所构成的平面分别与3坐标平面XOY、YOZ、ZOX的夹角为φ1、φ2、φ3.
按照图1中杆长约束条件可得
(2)
图2为曲柄滑块机构的平面几何图,根据余弦定理在三角形AiBiCi中
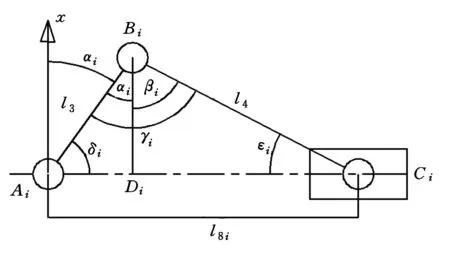
图2 曲柄滑块机构简图

(3)

(4)
2.3位置正解
并联机构运动学正解的输出角是已知4根曲柄的输出为αi角,解决了动平台的位置参数.求解过程采用解析法,由于篇幅所限,本文不给出详细过程.
由求根公式可得

(5)
hi=l8i+l5.
设h1≤h2≤h3≤h4,则h1=h,
(6)
3 并联机构建模
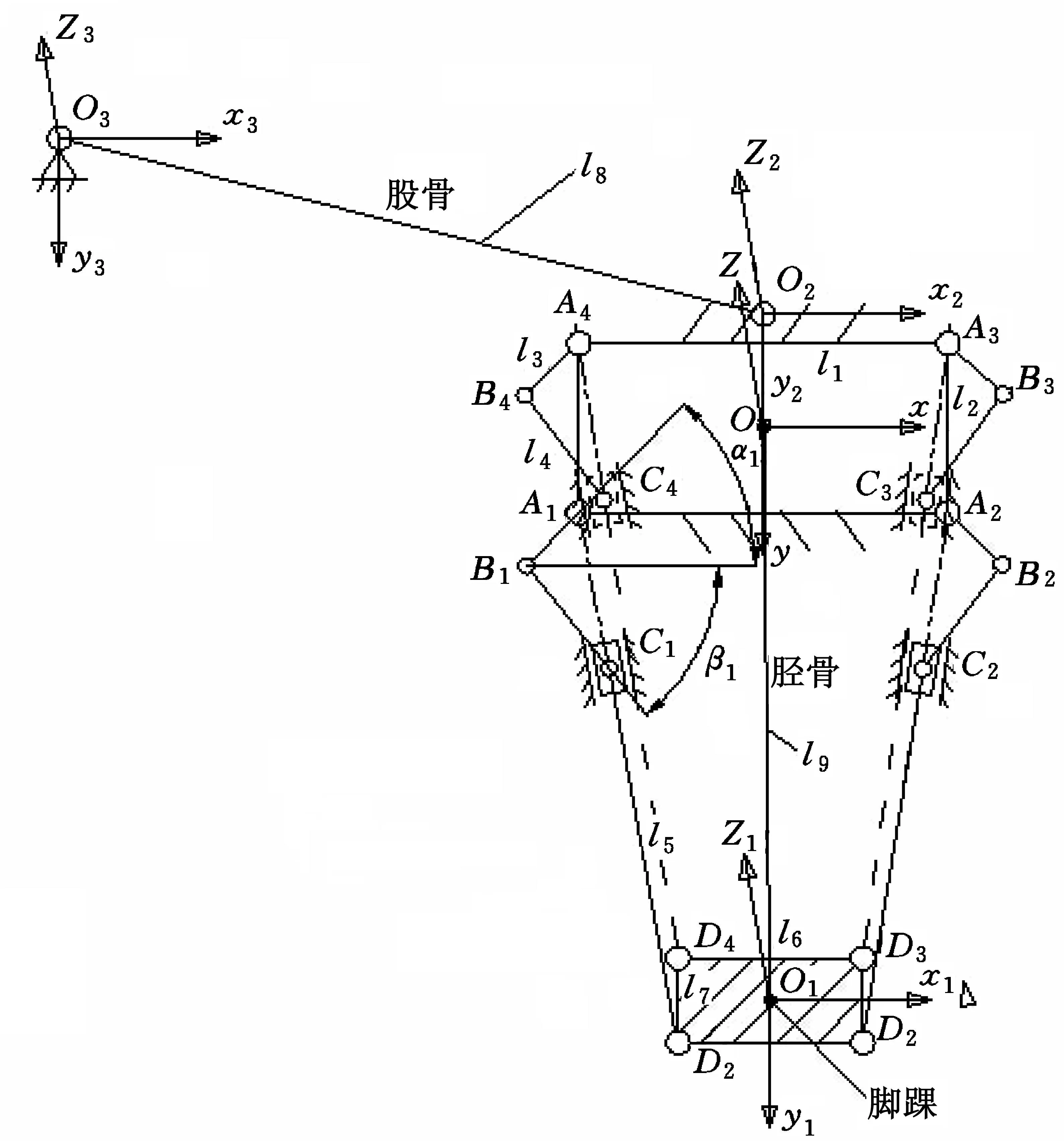
图3 并联机构建筑
当并联机构动平台的位置确定,腿部的空间位置得到控制,就可确定踝关节的空间参数.膝关节和髋关节做一定的往复运动时,腿部的运动轨迹可以看作由绕髋关节竖直方向的转动和膝关节竖直方向转动的合成,且轨迹唯一.因此,只需节制曲柄的驱动参数便可,分别在踝关节、膝关节、髋关节建立坐标系O1、O2、O3,其中O为固定坐标系原点,如图3所示.当并联平台位置确定时,因为并联机构是完全对称的布局.则


由此,O1在O—XYZ坐标系下的位置可以求出,而坐标系O2-X2Y2Z2与O-XYZ之间只存在坐标平移变换关系,坐标转换矩阵R可由O2在O-XYZ坐标系中的坐标唯一确定.
从而O1在坐标系O2-X2Y2Z2中的坐标表示为


4 结语
依据人体运动学规律,设计了一种新型踝关节运动矫正机构.该机构有4个自由度,可以实现脚部的侧翻、扭转和翘起,是一种转动副驱动的4自由度并联机构,具有布局合理、刚度大、结构简单等优点.采用解析法得到机构的位置正、逆解,为进一步的研究提供了理论参考,同时也为空间转动副驱动并联机构提供了一种解决方法.
参考文献:
[1]吕广明,孙立宁,彭龙刚.康复机器人技术发展现状及关键技术分析[J].哈尔滨工业大学学报,2004,36(9):1225|1227.
[2]励建安.减重训练的研究进展[J].中华物理医学与康复杂志,2002,24(12):759|760.
[3]程方,王人成,贾晓红,等.减重步行康复训练机器人研究进展[J].中国康复医学杂志,2008,23(4):366|368.
[4]张立勋,赵凌燕,胡明茂.下肢康复训练机器人的重心轨迹控制研究[J].应用科技,2005,32(4):54|56.
[5]程军.异构双腿行走机器人联合仿真分析及人工腿的设计[D].沈阳:东北大学,2006.
[6]StaufferY,ReynardF,AllemandY,eta1.PelvicmotionimplementationontheWalkTrainer[C].IEEEInternationalConferenceonRoboticsandBiomimetics,2007:133|138
[7]罗二娟,牟德君,刘晓.耦合型3自由度并联稳定平台机构及其运动特征[J].机器人,2010,32(5):681|687.
The Structural Design of the Ankle Motion Auxiliary Correctional Mechanism
LI Gaowei,MEI Ying,YIN Jiaojiao
(School of Mechanical and Power Engineering, North University of China, Taiyuan 030051,China)
Abstract:Based on the principle of spatial parallel mechanism and human lower extremity anatomy,this paper designs a new leg ankle rehabilitation facility in accordance with the normal basic size range of human's lower limb.Then the mathematical model of it is established and the kinematics simulation analysis is carried out to validate that this parallel mechanism, which is simple but with larger workspace and higher stiffness,could effectively improve dyskinesia and is suitable for various groups.
Key words:sports rehabilitation facilities; workspace; positive solution; inverse solution
(编辑武峰)