
卫星导航系统接收机原理与设计——之一(上)
2015-12-12 01:07:42刘天雄
卫星与网络 2015年7期
+ 刘天雄
卫星导航系统接收机原理与设计——之一(上)
+ 刘天雄

图1 基于到达时间测距原理接收机实现对用户位置的解算
概述 Receiver overview
全球卫星导航系统简称GNSS(Global Navigation Satellite System)系统,由空间段SS(space segment)、地面控制段CS(control segment)以及用户段US(user segment)三个部分组成,其中用户段US就是咱们手里拿的接收机。空间段SS的每颗导航卫星连续播发无线电导航信号,简称为SIS信号(Signals In Space),通常是L频段无线电信号,载波信号调制有周期数字码(periodic digital code)和导航电文(Navigation message),周期数字码又称为伪随机噪声测距码,简称PRN(pseudo-random noise code)码。
卫星导航系统定位的基本原理是单向到达时间测距,简称TOA(Time Of Arrival)原理,接收机通过解调导航信号的电文得到卫星的位置坐标,通过测量导航信号从卫星到接收机的传播时间来测距,以导航卫星为球心,信号传播的距离为半径画球面,用户接收机一定在球面上,当接收机分别测量出与四颗导航卫星之间的距离时,四个球面相交于一个点,即用户接收机的位置坐标,如图1所示。如果是导航仪,接收机根据位置坐标和数字地图的映射关系,可以把定位结果映射到数字地图上,在显示屏上给出地址信息。
根据不同的应用场景,卫星导航接收机可以设计成多种不同状态,从单频(single-frequency)到多频(multi-frequency)、从单系统(single -constellation)到多系统(multi-constellation)、从专业测量型(survey)到一般车载导航型(automotive applications),设计接收机时还需要考虑信号带宽(signal bandwidth)、信号调制(modulation)、伪码速率(code rate)等技术指标,权衡工作性能(performance)、成本(cost)、功耗(power consumption)以及自主性(autonomy)等要求。
虽然导航接收机可以设计成多种状态,但接收机的基本结构是一致的,主要包括接收天线(Antenna)、射频前端(Front End)、基带数字信号处理(Baseband signal processing)、应用处理(Applications Processing)四个模块,典型卫星导航接收机组成结构如图2所示,除了上述四个主要模块,接收机还得有供电模块(power unit)和机箱(enclosure)等辅助模块。

图2 一般卫星导航系统接收机结构组成
卫星导航接收机信号处理的核心内容是捕获(acquisition)、跟踪(tracking)、解调(demodulation)信号,译码卫星的星历、时钟偏差校正、电离层误差改正等导航导航电文数据,用户接收机才能够利用PRN码测量出卫星与用户机之间的距离,代入定位方程后才能给出位置P(Positioning)、速度V(Velocity)和时间T(Timing)等导航解(navigation solution),简称PVT结果,其中位置解算结果分别以导航卫星信号发射天线的接相位中心(antenna phase center)和用户机的收天线相位中心为参考点。
1 接收机功能
卫星导航接收机的任务是捕获按一定卫星仰角要求所选择的导航卫星的信号,跟踪这些导航卫星信号,对所接收到的导航信号进行放大、变换和处理,测量出导航信号从卫星到用户接收机的传播时间,解调、译码出导航卫星播发的导航电文数据,并根据导航电文给出的星历参数和时间信息,解算出用户的位置坐标,接收机是卫星导航系统的用户接口(user interface)。
卫星导航接收机完成导航信号的相关接收,所谓相关接收是指接收机在接收卫星导航系统卫星信号时,通过改变本地伪随机码生成器的相位,使其与相应卫星信号的伪随机码的相位对齐,从而完成对该卫星信号的跟踪和锁定的过程。接收机利用捕获环路和跟踪环路实现导航信号同步(帧同步和码同步),确定导航信号在空间的传播时间,用信号传播时间乘以无线电信号的传播速度,即可得到卫星与接收机之间的距离,代入导航定位方程,解算出用户所在位置的PVT导航解。
1.1接收 信号
接收机首先要捕获(acquisition)可见范围内的导航信号,识别出接收到的信号是那颗导航卫星播发的,然后才能开展进一步的跟踪、解调和伪距测量。GPS、Galileo和北斗卫星导航系统均采用CDMA码分多址(Code Division Multiple Access)信号技术,星座中所有导航卫星的同类信号多路复用在同一个载波频率上,而每颗卫星对应一个唯一的该类信号伪随机噪声码,伪随机噪声码信号具有高度自相关性(auto correlation),0延迟时,自相关函数取得最大值(峰值),而信号之间的互相关性(cross-correlation)极低,不同伪随机噪声序列(码)之间几乎是正交(orthogonal)的。
伪随机噪声码先对导航电文进行扩频调制处理,再将扩频信号调制在载波信号中。各大卫星导航系统为了推广民用导航信号的应用,以空间信号接口控制文件形式公开发布其导航信号的结构、伪随机噪声码设计以及导航电文等信息,空间信号接口控制文件简称SIS ICDs(Signal In Space Interface Control Document)。用户接收机在搜索导航信号前可以预先获取每颗卫星的伪随机噪声码,因此,通过本地复制PRN码(伪码)信号与接收到的导航PRN码信号进行相关处理(signal correlation)结果,就可以快捷地判断出这颗卫星(信号)是否在可见范围内。
1.2计算伪距及其变化
根据导航信号的播发时刻(卫星星载原子时钟标记)和接收时刻(接收机机时钟标记),卫星与接收机完成时间“同步”处理后,导航接收机可以计算出导航信号在空间的传播时间dt,乘以无线电信号的传播速度c,就可以得到卫星与用户机之间的距离R,即,通过测量本地时钟与恢复的卫星时钟之间的时延来测量从接收天线到卫星的距离,这是导航接收机定位的数学基础。接收机的位置一定在以卫星为圆心,以卫星与用户机之间的距离为半径的球面上,以平面定位为例,接收机的位置一定在以卫星为圆心,以卫星与用户机之间的距离为半径的两个圆的交点上,如图3所示。
定位原理假设接收机测量出与导航卫星之间的几何距离,但现实情况是用户接收机时钟、卫星时钟和系统时钟三者不可能严格时间同步,其实也没有必要同步,必然会存在接收机钟差、卫星钟差,同时导航信号在空间传播过程中还会产生对流层延迟和对流层延迟,以及有电文卫星星历参数得到的卫星轨道位置、信号多路径及接收机热噪声等误差源,由导航信号传播时间乘以传播速度得到的卫星与用户机之间的距离也存在较大的误差,一般称为“伪距”,英文翻译为"pseudorange",在代入导航方程求解用户位置前,需要进一步修正处理。
1.3计算位置、速度和时间
根据伪距观测量以及导航电文等信息,接收机应用处理模块(application processing)可以解算出接收机所在的位置(经度、纬度、高度)、速度和时间,实现系统的时间传递(time transfer),即授时功能,也可以将数据收集整理在地面站后期处理(postprocessed in the ground stations)。
2 接收机组成
GNSS用户接收机由天线(Antenna)、射频前端(RF Front-End)、数字信号处理(Digital signal processing)通道和应用处理(application processing)模块组成,GNSS接收机结构组成如图4所示。

图3 通过计算信号传播时间确定用户位置
天线将接收到的导航信号传输给射频前端,射频前端通常也称为前置放大器,射频前端滤除噪声并放大导航信号,完成射频信号下变频、滤波以及模数转换处理,生成包括实部(real)和虚部(complex)两部分组成的的数字基带中频信号,又称为I支路同相(In-Phase)分量和Q支路正交(Quadrature)分量。I支路和Q支路分量分别与由本地数控振荡器产生两路正交映射载波相乘,进行载波混频剥离,载波混频剥离后的两支路分别再与超前、即时和滞后三路本地复制测距码相乘,进行扩频码剥离,当通过调整载波频率和伪码相位使得两个跟踪环路稳定跟踪后,即可测得伪距观测量,同时译码出导航电文数据。解算出卫星与用户机之间的测距值,根据三角测量原理,解算出用户的位置坐标。
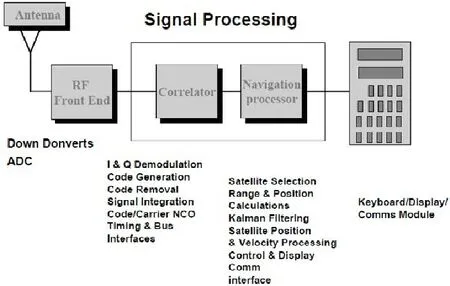
图4 GNSS接收机结构组成
需要进一步指出的是,导航卫星在轨道空间上高速运动,为了获得连续的定位解算结果,导航接收机必须连续地搜索(search)、捕获(acquire)、跟踪(track)可见范围(in view)内的导航卫星播发的无线电导航信号,并与导航信号保持同步。
2.1天线
导航接收机的天线负责接收来自空间导航卫星播发的L频段(1.2~1.6 GHz)射频电磁波信号,并将电磁波信号转换为微波电信号,并将该模拟导航信号输入到射频前端。有时接收天线还需要配置放大器和滤波器,从用户角度来说天线是地面接收机和空间导航卫星星座之间的接口。
导航接收机天线设计的主要目标是在给定仰角(elevation angle)、在导航信号播发方向获得最大天线增益(antenna gain),同时抑制多径干扰信号。天线的技术要求包括增益与接收仰角、多径和抗干扰、相位中心稳定性以及体积、功耗、便携性和环境条件约束条件。
鉴于卫星导航信号强度极其微弱且易受到干扰,可以采用阵列天线(antenna arrays)修改天线的辐射方向图(radiation pattern),以抑制干扰信号方向的接收。此外,天线波束调整技术(beam steering techniques)可以最大天线增益跟踪并接收给定卫星的导航信号。
因此,GPS接收机天线的性能决定了接收机获取导航信号的能力。接收机天线的性能指标有方向图增益(Gain)、轴比(Axial ratio)、驻波比(VSWR)、噪声系数(Noise figure)、相位中心(Phase Centre)、极化(Polarization)方式、相位中心的稳定性和重复性(phase stability and repeatability)等参数,其中相位中心的稳定性和重复性对于载波相位测距来说十分关键。
卫星导航接收机天线一般包括辐射单元(radiating element)、功率放大器(amplifier)和天线罩(radome)三部分,其中辐射单元安装在金属的“地平面”上。辐射单元决定了天线的带宽和辐射特性,“地平面”影响天线的辐射方向图形状,特别是低仰角下的接收特性;放大器决定了接收机噪声系数;天线罩影响天线的相位中心。
猜你喜欢
电子与信息学报(2021年2期)2021-03-17 09:45:42
中学生数理化·八年级物理人教版(2020年11期)2020-12-14 06:58:24
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
中学生数理化·八年级物理人教版(2018年4期)2018-06-27 08:08:02
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
百科探秘·航空航天(2016年9期)2016-12-01 03:04:14
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
导航定位学报(2015年2期)2015-06-05 09:27:31
