中海达ZNetVRS解算软件在北斗地基增强系统中的应用分析
2015-12-11 05:57冯世光潘国富
测绘通报 2015年2期
邹 盛,冯世光,潘国富
(广州中海达卫星导航技术股份有限公司,广东广州511400)
一、引 言
增强系统可以提高全球导航系统的导航定位性能,能满足高精度的应用。自北斗卫星导航系统正式提供服务以来,地基增强系统的建设在我国陆续展开。而实现地基增强系统的主流算法为虚拟参考站(VRS)技术。
中海达CORS经过多年的实际项目锤炼,形成了北斗地基增强系统平台建设的完整解决方案,系统的主要特点有:①国产自主品牌北斗接收机(支持B3信号/数据流加密);②具有自主知识产权的ZNetVRS解算软件;③支持大型CORS系统建设(支持分布式运行);④支持在线坐标转换系统;⑤参数加密、似大地水准精化成果运用;⑥可限制用户作业区域;⑦及时短信报警机制。
中海达北斗地基增强系统方案可为每个基站配置智能插座,如图1(a)所示。当接收机出现网络或其他异常情况时,管理员可通过发送短信将接收机断电再重启。软件则监控基站数据流,当出现数据中断3 min的情况时,软件会通过短信猫发送报警信息给管理员,以提醒管理员检查维护系统,短信猫如图1(b)所示。
二、ZNetVRS解算软件架构
ZNetVRS解算软件设计为一个多用户、可扩展的空间位置信息服务平台,能分别为DGPS用户和RTK用户提供实时分米级和厘米级定位服务,能为用户实时提供厘米级大地高程数据服务(在加入精化大地水准面数据库前提下,也能为后处理用户提供毫米级定位服务)。
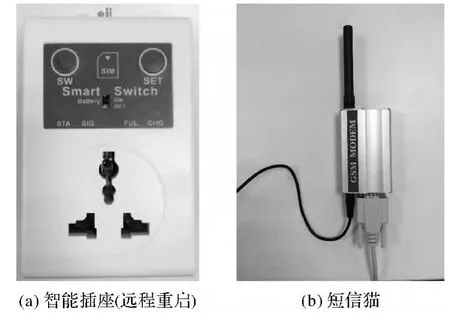
图1
使用该软件,用户可以稳定地接入多个站点的三星数据,并进行测站和站网的监控,可以解算测站所构成的基线并能生成VRS数据。用户可配置数据播发的格式,包括 CMR、RTCM 2.3、RTCM3.1、RTCM3.2及国内北斗差分格式。软件可以根据当前基站数据给出当前区域的电离层活跃指数I95,指导外业工作。软件设计的总体结构如图2所示。
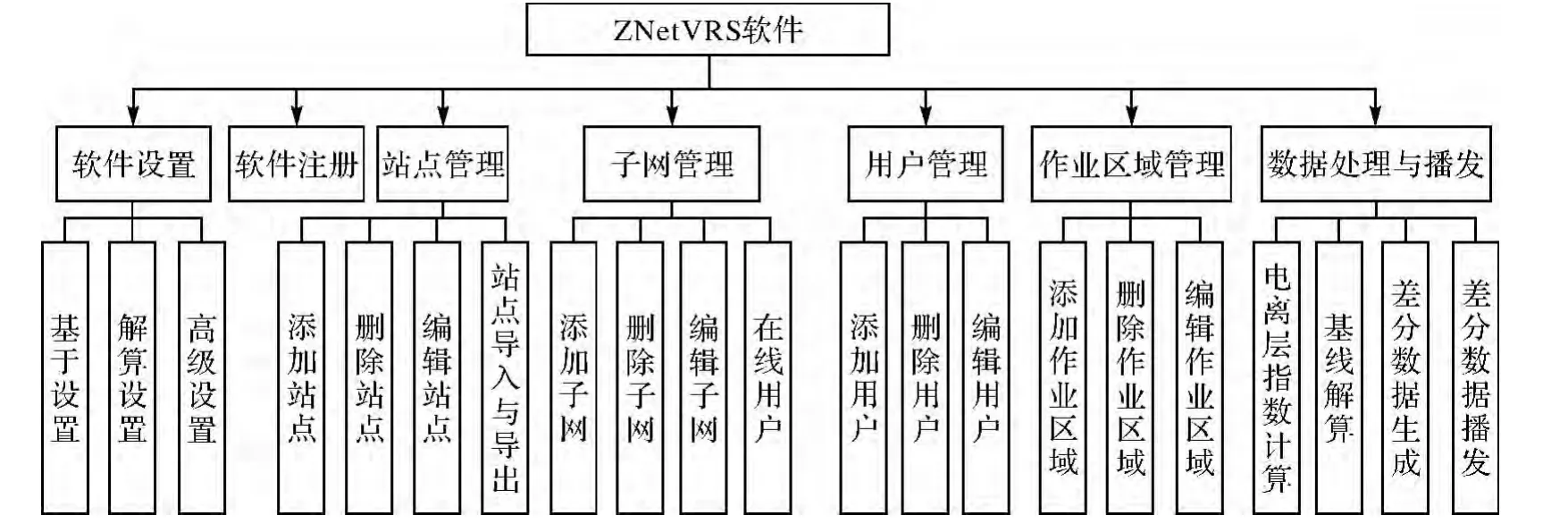
图2 ZNetVRS软件总体结构
三、ZNetVRS解算软件的项目应用
ZNetVRS软件已在多个北斗地基增强系统中得到应用。本文以由中海达公司承建的云南保山市新建北斗地基增强系统为例,详细介绍软件的应用。
保山市地基增强系统方案设计为11个基站的CORS网,包括新建9个中海达的VNet6(天宝主板的三星接收机)基站及2个原有国家站(一个是天宝三星接收机,一个是天宝双星接收机)。
1.支持各类型基站解算
ZNetVRS解算软件可以对不同品牌不同类型的CORS基站进行数据解算,并实现构网。兼容的国外厂商主板有 Trimble、Novatel、TOPCON、Leica、CSI等,国内厂商主板有和芯星通、和协航电等,并支持RTCM3.0及RTCM3.2格式的数据接入。针对目前大部分升级型CORS项目而言,可以将旧基站数据接入到ZNetVRS软件,软件可以以旧基站和新的北斗基站分别组网解算,既实现了对原有设备的利用,又达到了系统升级的效果。
管理员根据接收机选择相对应的主板类型项进行基站定义,即可达到不同类型接收机成功组合为一个子网提供服务的效果。在保山项目中所有基站都选择为VNet-T(天宝主板)类型进行基站解算。对于中海达自主品牌接收机,可以对基站数据进行加密。当基站数据加密后需要将数据流加密勾选框勾选,软件会自动进行数据解密并解算。
2.支持北斗B3信号的解析
北斗卫星导航系统具备短报文通信、差分服务和完好性服务特色,在 L、S频段发播导航信号,L频段B1、B2和B3三个频点上发射开放和授权服务信号。
ZNetVRS解算软件可以解算包括GPS的L1、L2,GLONASS 的 L1、L2,以及 BDS 的 B1、B2 和 B3频段的数据。全方位的频段数据解算可以大大提高基线的固定准确率和精度,使系统可用性达到95%以上。软件包括了对基站星空图的展示模块,可以实时显示基站接收到卫星的星空图。
3.用户管理
ZNetVRS解算软件可以同时支持超过1000个测量或导航用户的接入。软件管理员可以根据用户移动站的性能和使用权限为其分配账号。账号信息包括用户名、密码、用户到期时间、用户可用金额等。测量人员根据管理员提供的账户信息进行登录获取差分数据,以达到高精度的定位数据实施测量工作。管理员还可以随时进行用户充值、修改密码及查看所有在线用户信息等操作。
4.基站组网及RTK精度测试分析
保山市北斗地基增强系统新建9个基站,并接入2个国家(板桥和施甸)站联合组网,其中板桥站为天宝三星主机,施甸站为天宝双星主机,整个系统组成11个站的中型CORS网。
该网中最长的基线64 km,最短基线长33 km。
为了检测软件算法的精度及伪距差分的定位服务的稳定性,对保山CORS系统测试采取实测方式进行如下试验:①在CORS网作用范围内选择8个CGCS2000控制点(固东 M006、福禄地 M025、潞江M034、柯街 M043、施甸 M045、昌宁 M047、黄草坝M051、勐糯M054),8个点分布在网内的不同区域;②在每个已知点用中海达V30静止开机后接收RTCM30和RTCM32差分数据分别定位,按1 s的采样频率连续记录定位结果;③事后统计精度计算。
本文对8个已知点进行了基于RTCM30和RTCM32定位的精度对比测试,采集数据时间分别为24 h。对采集数据的解状态进行统计,达到固定解的时间率超过全天95%,对精度统计结果见表1、表2。
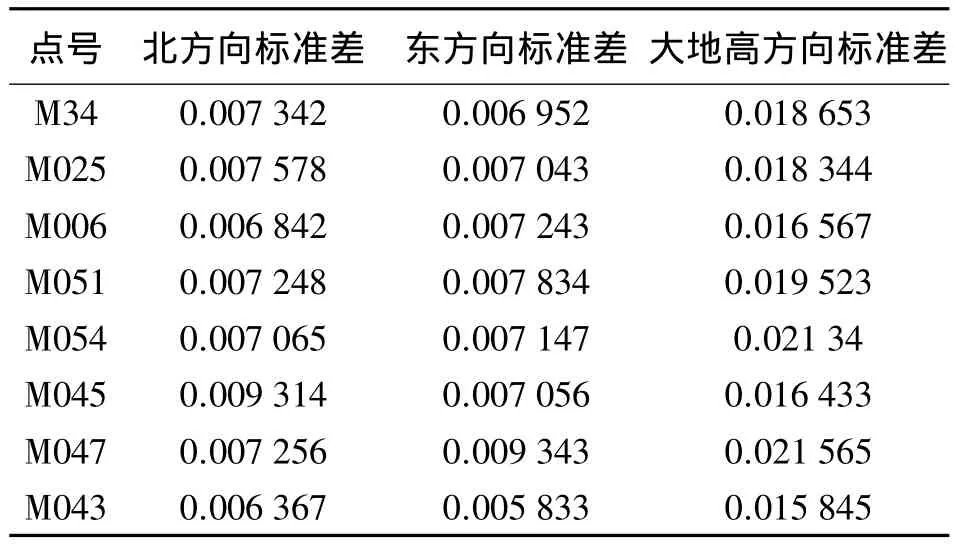
表1 RTCM30定位中误差统计 m
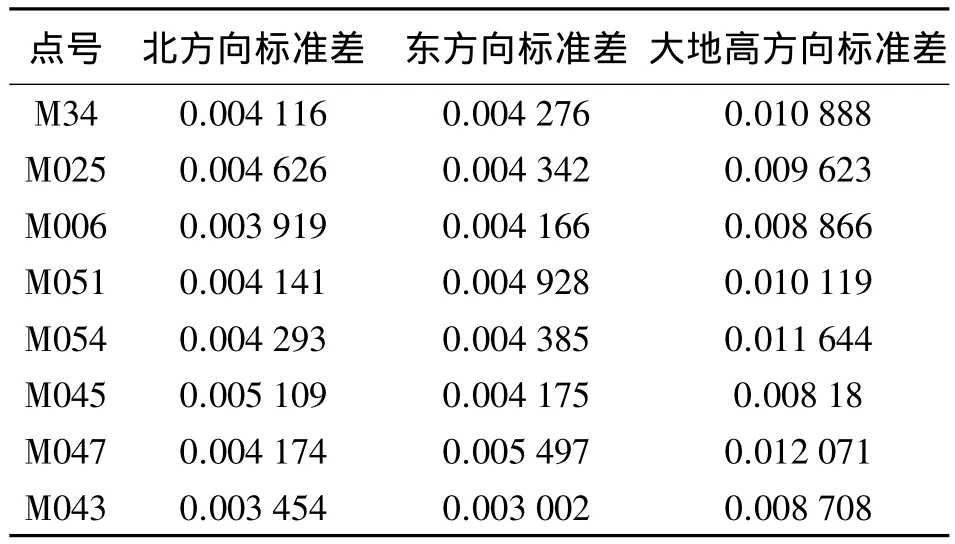
表2 RTCM32定位中误差统计 m
从对比测试结果可以看出:
1)CORS网服务范围内各个地方精度差异小,移动站工作不受与基站距离的影响。
2)采用 RTCM32(GPS+GLONASS+BDS)的RTK比RTCM30(GPS+GLONASS)定位精度要更高,高程方向有明显提升,满足常规测量精度要求。
3)本文系统能够连续进行RTK差分定位服务,满足不同时间段测量要求。
四、结束语
本文系统在多个北斗地基增强系统中实践多年,可以无缝接入各类基站接收机,支持GPS、BDS、GLONASS全星座全频段长基线解算,支持国际通用的兼容北斗的差分电文标准(RTCM3.2),兼容所有国内外品牌接收机的终端接入。测试表明,中海达ZNetVRS解算软件应用于北斗地基增强系统的技术方案正确可行,且相对于只提供RTCM30的CORS系统,移动站的时间可用性和测量精度都更高。
猜你喜欢
小哥白尼(神奇星球)(2022年3期)2022-06-06
导航定位学报(2022年1期)2022-02-17
房地产导刊(2020年5期)2020-06-24
当代陕西(2019年18期)2019-10-17
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
商周刊(2017年6期)2017-08-22
电子制作(2016年1期)2016-11-07
太空探索(2016年12期)2016-07-18
太空探索(2016年3期)2016-07-12