针对空间碎片捕获的绕飞轨道设计
2015-12-09 01:53:48刘欢张永
深空探测学报 2015年4期
刘欢,张永
(中国空间技术研究院载人航天总体部,北京100094)
针对空间碎片捕获的绕飞轨道设计
刘欢,张永
(中国空间技术研究院载人航天总体部,北京100094)
地球轨道上日益增长的碎片云已引起各个航天国家的担忧,地球轨道上可编目的空间物体数量30多年内增长了2倍多,若不实施主动清除,碎片的数量将在未来200年内快速增长,给空间系统的安全带来极大的威胁。自然椭圆绕飞轨道可在目标附近长时间绕飞,可保证碎片捕获系统具有长时间的观测、捕获时间。文章提出通过设计绕飞轨道来实现捕获碎片的方案,介绍并分别推导了基于C-W方程和轨道根数两种方式绕飞轨道设计的方法。针对假想的捕获目标,基于轨道根数方法设计了5种脉冲变轨的轨道方案,并进行了相应的轨道算例仿真。仿真结果表明:该方案可适用于任意的初始相位差,具备一定的工程实现意义。
碎片;近距离;捕获;绕飞
0 引 言
自1957年世界的第1颗人造卫星升空以来,航天器的应用与人类社会的发展愈加紧密,但随着进入外层空间物体数量的不断增加,空间碎片环境问题也越发突出。地球轨道上可编目的空间物体数量在30年间增长了2倍多,尺寸大小在1~10 cm之间的碎片数量大约为67万个;大于0.1 mm的碎片超过200亿个[1]。若不实施主动清除,碎片的数量将在未来200年内将快速增长,给空间系统的安全带来巨大的威胁。为避免类似2009年美国卫星Iridium 33和俄罗斯卫星Kosmos 2251的太空碰撞事件再次发生,降低空间碎片的碰撞概率,对空间碎片进行主动式清理研究具有重要的现实意义[2]。在碎片清除系统方案选择上,当前各国一致倾向于“捕获+离轨”式清除方案[3]。即首先碎片清除器采用跟踪定位依靠系统逐渐逼近失去姿控能力的目标碎片(非合作目标)进行捕获,然后依靠轨道转移(离轨)系统将目标拖入大气层烧毁或降低其运行的轨道,等待其日后自行衰减。空间碎片大多时候都已失去姿控能力,对于这些翻滚的、不合作的空间目标,捕获难度较大,若碎片清除器有较长的时间运行在碎片附近,则可为捕获机构捕获碎片创造较为有利的条件。航天器的绕飞是在轨航天器围绕另一个在轨航天器的周期性的封闭相对运动[4]。可作为碎片清理卫星的轨道选择,如果能够保证碎片捕获系统具有长时间的观测、捕获时间,就可以提高捕获成功率。
1 坐标系定义
绕飞是描述追踪航天器(碎片清理系统)在目标航天器(空间碎片)附近持续运行的规律,为描述追踪航天器与目标航天器之间的相对运动,需要引入三个坐标系。
1)地心赤道惯性坐标系O1X1Y1Z1
原点位于地球的地心,X1Y1平面为赤道平面,O1X1轴指向春分点,O1Z1指向北极,O1Y1轴在赤道平面内,并与O1X1和O1Z1轴成右手直角坐标系。
2)目标航天器轨道坐标系OXoYoZo
原点位于目标航天器的质心,Xo轴与目标航天器轨道矢量r重合,由地心指向目标航天器,Yo轴在目标航天器轨道面内与Xo轴垂直,沿运动方向为正,Zo轴垂直于轨道平面,与Xo、Yo构成右手坐标系。
3)追踪航天器轨道坐标系
原点位于追踪飞行器的质心,三坐标轴定义方式与目标航天器轨道坐标系相同。
2 绕飞轨道设计
绕飞轨道要求绕飞航天器与目标航天器轨道要素相差很小,且二者周期相等,即半长轴相等。绕飞轨道控制方法有:
1)基于C-W方程的绕飞轨道设计;
2)基于相对轨道要素的绕飞轨道设计。

图1 坐标系定义Fig.1 Definition of coordinate system
2.1 基于C-W方程的绕飞轨道设计
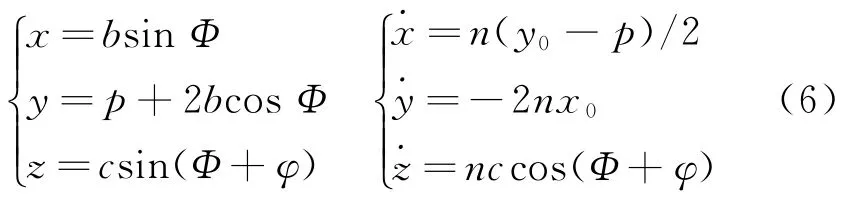
对于近圆参考轨道,忽略摄动影响的线性化动力学方程,即C-W方程,其位置解析解的表达式可表示为[5]
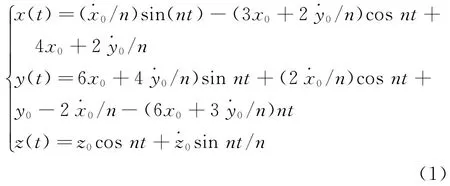
其中:x,y,z表示追踪航天器相对目标航天器(空间碎片)在目标航天器轨道坐标系中的位置描述;t表示时间;分别为追踪航天器相对目标航天器的初始位置和初始速度;;a为目标航天器轨道半长轴。
将式(1)化为常值项、长期项与周期项之和的形式,可得
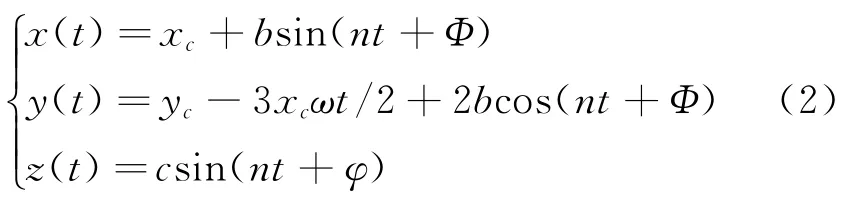
其中
消除长期项的周期运动条件为

在周期条件下,面内运动轨迹可表示为[5-6]。

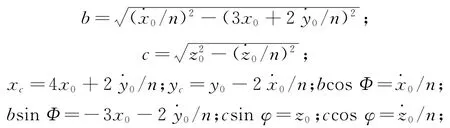
若c=0,则自然周期相对轨迹为面内椭圆;若c≠0,则自然周期轨迹为倾斜椭圆。由式(4)可得,面内自然周期轨迹条件为

当两航天器距离较近,且目标航天器为小偏心率的情况,在当前状态下,对追踪航天器实施一次脉冲即可进入周期绕飞轨迹,设伴飞轨道的中心偏离量为p,则进入满足绕飞条件点的状态为
2.2 基于经典轨道根数的绕飞轨迹设计
两航天器的平均轨道要素依次为半长轴、偏心率、轨道倾角、升交点赤经、近地点幅角、真近点角、纬度幅角、平近点角和过近地点时刻。假设目标航天器T的轨道要素为:a1、e1、i1、Ω1、ω1、θ1、u1(u1=ω1+θ1)、M1、tp1;追踪航天器C的轨道要素为:a2、e2、i2、Ω2、ω2、θ2、u2(u2=ω2+θ2)、M2、tp2。
以经典轨道要素描述的相对运动方程为[5]
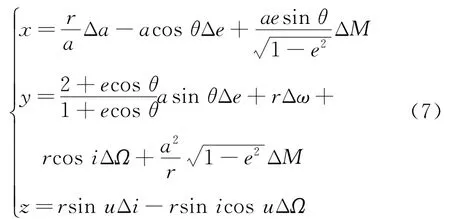
其中:Δa=a2-a1;Δe=e2-e1;Δi=i2-i1;ΔΩ=Ω2-Ω1;Δω=ω2-ω1;Δθ=θ2-θ1;ΔM=M2-M1;Δtp=tp2-tp1;。
基于经典轨道要素的绕飞轨道适用于任意偏心率的情况,当Δa=a2-a1=0时,可实现两航天器的自然周期轨迹绕飞:
1)轨道面内绕飞轨迹为长短半轴之比为2∶1的椭圆轨迹;
2)绕飞椭圆半径与偏心率Δe有关,绕飞椭圆半长轴为2Δea;
3)轨道倾角差仅影响面外相对运动,其影响既包含周期相,又包括常值项;
4)升交点赤经差对径向运动无影响,对切向、法向运动的影响既包含周期相,又包含常值项;
广义直流电动机直接转矩控制同样遵循直流电动机的自控变频运行机制,所以才能获得直流电动机的优良控制性能。
5)平近点角将影响面内相对运动,与相对运动轨迹的圆心位置有关。
2.3 两种设计方法的比较
通过上述的推导得出,基于C-W方程和基于轨道根数的绕飞轨道设计方法均可实现对空间碎片的绕飞轨道设计:
1)C-W方程式是针对近圆轨道推导得出,适用于两航天器相对距离较近的情况,对于两航天器距离较远,或目标航天器为椭圆轨道的情况则不适用。此外,此方法只适用于合作目标,且C-W方程中的状态变量难以观测,在工程应用中具有一定的局限性[7]。
2)基于经典轨道根数的绕飞轨迹设计以平均轨道要素描述两航天器的相对关系,不受航天器距离、偏心率的限制,变轨目标明确,适用于地面导引变轨,可通过地面导引,将航天器由任意位置通过调相变轨,将航天器至选定碎片目标附近的绕飞轨道。
3 轨道设计算例
假设有一废弃卫星(空间碎片)位于800 km高度、倾角97.406 5°的轨道上,轨道偏心率e=0.002。碎片清除卫星初始轨道为a=500 km、轨道倾角与废弃卫星一致的太阳同步轨道上,两飞行器初始相位差180°,升交点赤经相同。要求以目标碎片为绕飞中心,碎片清除器的攻击包络要求面内最大距离不超过30 km,面外振幅不超过10 km。
根据2.3节的分析,两航天器初始相位差为180°,初始相对距离较远,且目标航天器为椭圆轨道,因此采用基于经典轨道根数的绕飞轨迹设计方法进行绕飞轨道设计。
首先确定变轨的目标,即进入绕飞轨道的目标轨道根数,根据第2节的基于轨道根数的绕飞轨道设计方法,对瞄准目标进行。
1)若要实现两飞行器绕飞,则要求Δa=0;
2)绕飞轨道在基准轨道平面上的投影是长轴为2aΔe,短轴为aΔe的椭圆,根据攻击包络要求面内最大距离不超过30 km,碎片清除卫星与目标碎片的轨道偏心率差Δe=0.002 09;
3)若要实现以目标碎片为绕飞中心,则有Δω+ ΔM=0,ΔΩ=0;
4)考虑ΔΩ=0,则面外振幅由Δi决定,要求面外振幅不超过10 km,则|Δi|≤0.001 4°。
因此,设计的绕飞轨道瞄准进入点取为:
Δa=0,Δe=0.002 09,|Δi|≤0.001 4°,Δω=0,ΔM=0,ΔΩ=0。
变轨目标的6个轨道根数,其中倾角i和升交点赤经Ω可通过一次面外轨控实现,a、e、ω、M的调整需要5次面内变轨:第1次变轨调整两航天器的相位,可在追踪航天器初始轨道的近地点或远地点实施,第2次变轨调整轨道面面外,选择在轨道面交点处,最后3次变轨,完成轨道半长轴、近地点幅角和偏心率的调整,变轨点选择追踪航天器轨道的近地点或远地点附近,在确定了变轨次数后,根据任务时间要求和实际测定轨所需的轨道弧段,设计相应的变轨策略。
若要在3 d时间内,将清除器卫星导引至目标航天器(空间碎片)附近,假设由于测定轨能力的约束各次变轨之间至少间隔3圈时间,初始圈次0,由于调相时间越长,所需的速度增量越小,因此第1次调相变轨应尽早开始,考虑测定轨所需的轨道弧段,第1次变轨安排在第3圈,第2次面外控制相对独立,其圈次安排也相对独立,可将其安排在第26圈,按照最后1次变轨在3 d内(42圈)完成,考虑3圈弧长对应的圈次差最大为4圈,按照各次变轨之间间隔4圈进行变轨策略规划,可得具体的变轨策略如表1所示。
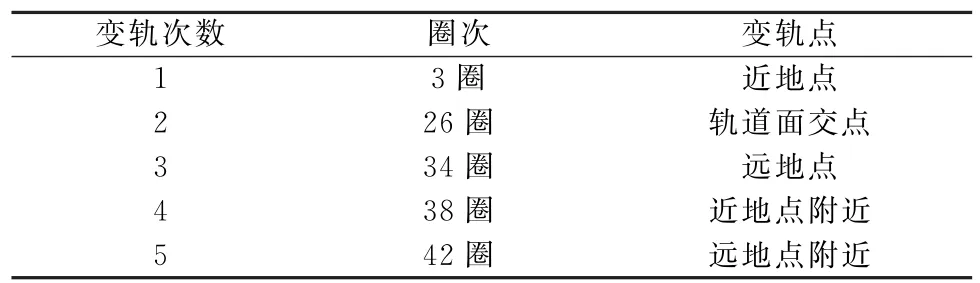
表1 变轨策略Table 1 Transfer strategy
通过多变量迭代计算,可得5次变轨的速度增量如表2所示。
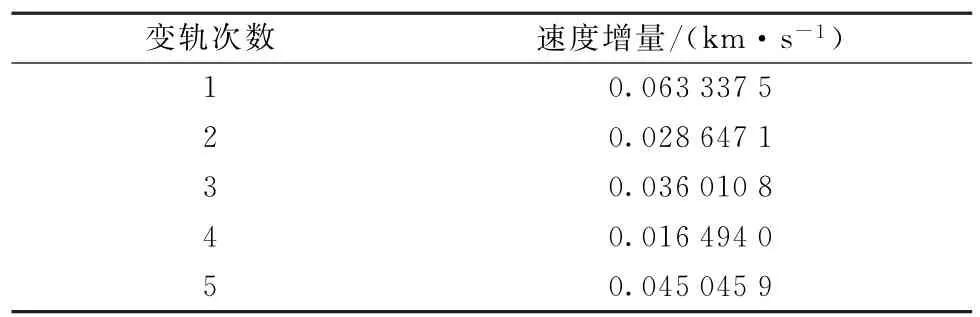
表2 各次变轨速度增量Table 2 Each impulse of transfer strategy
通过5次变轨,碎片清除器卫星进入与目标碎片卫星的绕飞轨道,碎片清除卫星的半长轴变化如图2所示,进入绕飞轨道后,相对目标碎片的面内相对运动关系如图3、图4所示,可以看出采用上述绕飞轨道可以保证碎片清除卫星长时间在目标碎片附近运动,为飞网抓捕、激光清除等手段提供长时间的捕获窗口。
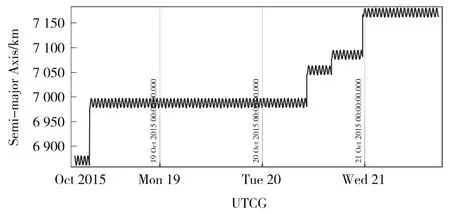
图2 碎片清除卫星半长轴变化Fig.2 Transformation of semi-major axis
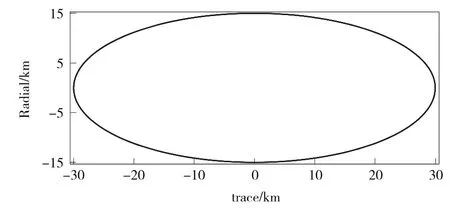
图3 绕飞轨迹在迹向-径向的投影Fig.3 Projection of flying-around orbit in trace-radial plane

图4 绕飞轨迹在迹向法向的投影Fig.4 Projection of flying-around orbit in trace-normal plane
4 结 论
基于C-W方程和轨道根数两种方式,推导了满足绕飞轨道的条件,并针对假想的捕获目标,设计了5次变轨实现绕飞的轨道策略,可将碎片清除卫星从与空间碎片相距任意相位的位置,导引至满足任务约束的绕飞轨道,绕飞可在数个轨道周期内保持稳定,在轨道机动能力允许的条件下,可清除任意位置的空间碎片,可为碎片清除机构提供灵活的捕获窗口,具备一定的现实意义。
[1]龚自正,徐坤博,牟永强,等.空间碎片环境现状与主动移除技术[J].航天器环境工程,2014,32(2):129-135.[Gong Z Z,Xu K B,Mou Y Q,et al.The space debris environment and the active debris removal techniques[J].Spacecraft Environment Engineering,2014,32(2):129-135.]
[2]张玉军,冯书兴.主动式空间碎片清理研究[J].装备指挥技术学院学报,2010,21(6):78 82.[Zhang Y J,Feng S X.Research on active space debris remoral[J].Journal of the Academy of Equipment Command&Technology,2010,21(6):78-82.]
[3]马楠,贵先洲.国外空间碎片清除计划[J].国际太空,2013(2):64 69.[Ma N,Gui X Z.The removal plan from space debris in abroad[J].International Space,2013(2):64-69.]
[4]罗建军,杨宇和,袁建平.共面快速受控绕飞轨迹设计与控制[J].宇航学报,2006,27(6):1389-1393.[Luo J J,Yang Y H,Yuan J P.Trajectory design and control of in-plane fast controlled fly-around[J].Journal of Astronautics,2006,27(6):1389-1393]
[5]杨乐平,朱彦伟,黄涣.航天器相对运动轨迹规划与控制[M].北京:国防工业出版社,2010:81-100.[Yang L P,Zhu Y W,Huang H.Trajectory planning and control for spacecraft relative motion[M].Beijing:National Defence Industry Press,2010:81-100.]
[6]昊会英,陈宏宇,余勇,等.远距离轨道接近及绕飞控制技术研究[J].中国空间科学技术,2010,1:25-33.[Wu H Y,Chen H Y,Y Y,et al.Study of long-distance approaching and companion flying technology[J].Chinese Space Science and Technology,2010,1:25-33]
[7]李兴龙,姚郁,杨宝庆.空间飞行器环绕进入绕飞轨道策略研究[J].现代防御技术,2011,39(6):20-25.[Li X L,Yao Y,Yang B Q.Guidance strategy of circulating and entering flyaround orbit for space vehicle[J].Modern Defence Technology,2011,39(6):20-25.]
通信地址:北京市海淀区友谊路104号5142信箱346分箱(100094)
E-mail:huanhuansuper@sina.com
Design of Fly-Around Orbit for Space Debris Capturing
LIU Huan,ZHANG Yong
(Beijing Institute of Manned Space System Engineering,China Academy of Space Technology,Beijing 100094,China)
The growing debris cloud in orbit has caused concern in many countries,the number of space objects which are cataloged has increased by more than 2 times with in 30 years.If they are not cleared actively,the number will grow rapidly in the next 200 years and cause great threat.Uncontrolled fly-around orbit can stay near the target for a long time,provide long time to observe and capture debris.This paper proposed a plan of fly-around orbit,inferred two methods based on C-W equation and orbital elements,and designed an orbit planusing 5 orbit maneuvers aimed at hypothetical target,which fits for any initial position,and has practical value for engineering.
space debris;close range;capture;fly-around
V19
A
2095-7777(2015)04-0376-05
10.15982/j.issn.2095-7777.2015.04.013
刘欢(1988—),女,工程师,主要研究方向:载人航天器总体设计。
[责任编辑:宋宏]
2015-09-11
2015-10-20
猜你喜欢
中国棉花(2022年2期)2022-11-23 20:02:04
数学小灵通(1-2年级)(2022年11期)2022-11-21 01:51:48
国际太空(2022年7期)2022-08-16 09:52:50
国际太空(2019年9期)2019-10-23 01:55:34
国际太空(2018年12期)2019-01-28 12:53:20
国际太空(2018年9期)2018-10-18 08:51:32
数学大王·低年级(2018年3期)2018-03-27 07:44:22
太空探索(2016年12期)2016-07-18 11:13:43
新高考·高一物理(2016年3期)2016-05-18 15:59:10
新高考·高一物理(2016年3期)2016-05-18 02:56:46