基于多视图几何的三维测量技术研究
2015-12-08 02:29潘其锋任悦萍
建材与装饰 2015年47期
潘其锋 任悦萍
(浙江新景市政园林有限公司浙江绍兴 312000)
基于多视图几何的三维测量技术研究
潘其锋 任悦萍
(浙江新景市政园林有限公司浙江绍兴 312000)
随着三维测量技术的推广,基于多视图的测量技术研究越来越热门。由于摄像机标定的精度会对视觉测量的结果造成影响,因此基于多视图几何的三维测量技术的关键是对摄像机进行标定。本文利用一台CCD(电荷耦合元件)摄像机在没有标定靶的条件下完成高精度的视觉测量。
多视图;三维测量;技术研究
对摄像机的标定时三维测量技术中的关键环节,一般在摄像机标定的过程中都要借助参考点或者标定靶来实现,因此视觉测量的效率就会收到影响。随着科学技术的发展,建筑行业对精密测量技术提出了较高的要求,不仅要担负产品质量检验的重任,而且还要提高建筑产品的生产效率。本研究中在标定CCD摄像机的过程中采用摄像机的自标定技术,利用基于绝对二次曲面的摄像机自标定方法,完全不需要借助标定靶。将计算机视图中的多视觉方法与单目视觉测量技术相结合,可以利用单个的CCD摄像机完成三维测量。
1 摄像机视觉测量理论
摄像机视觉测量技术的核心是在图像数据的基础上实现三维重构,三维重构技术涉及到射影几何理论。
图1是摄像机成像模型的几何关系。
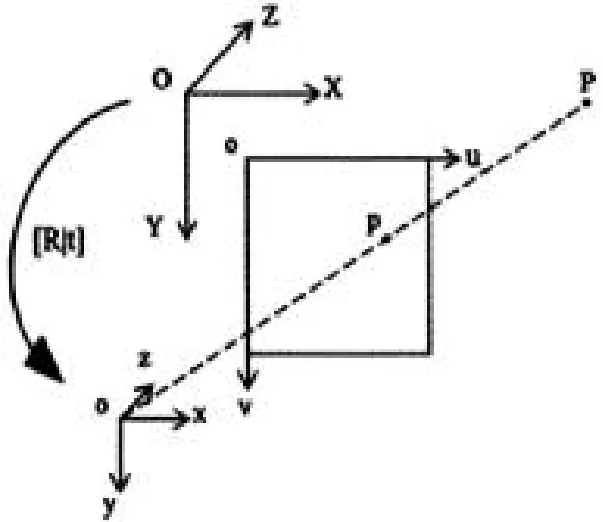
图1 摄像机成像模型的几何关系
P点是空间点P在摄像机像面中的像,O-XYZ为物面坐标系,P点的坐标可以直接得出,o-uv为像面坐标系,可以直接得出p点的坐标,o-xyz为摄像机坐标系,o为光心。摄像机在成像过程中,通过矩阵变换将三维空间点转换为二维图像,例如将P转换为p。
在同一场景下,将两台摄像机视图之间的射影几何称为对极几何,对极几何直接与摄像机的结构参数和相对参数和相对姿态有关,并且独立于空间场景[1]。
2 数字图像的获取和处理
多视图几何测量技术的目的是要获取被测目标的图像,随着半导体技术和光电传感技术的发展,CCD电荷耦合元件被广泛应用于摄像机图像传感器中。
CCD传感器中的半导体材料感光度较高,将光信号转变成电信号,即利用A/D转换器实现模拟信号向数字信号的转变,对数字信号进行压缩后保存到摄像机内部的存储设备上。CCD图像传感器会在光纤的照射下反应出电荷量,不同的感光单元将电信号集中起来就形成一幅完整的图像。
在多视图三维测量系统中,CCD图像传感器是至关重要的部件,一般用CCD尺寸、像素数量、信噪比和灵敏度来衡量传感器的性能。
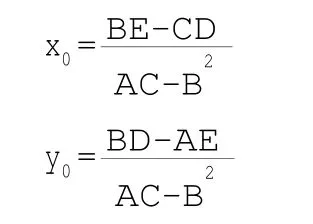
在建筑测量过程中,通常对图像中提取的边缘点进行椭圆拟合,因为圆形的标志点往往会被投影成椭圆形的标志点,通过椭圆拟合后可以计算出椭圆的中心坐标。将椭圆的一般式方程表示为:

将椭圆的中心坐标表示为:
由于图像噪声会对椭圆标志点的中心定位精度造成一定的影响,因此必须对标志点边缘进行多次拟合以消除图像噪声。当第一次椭圆拟合结束后,计算出边缘像素点的残差,剔除残差较大的像素点,对剩余的像素点进行二次拟合,以提高标志点中心坐标的定位精度。如果标志点在图像中所占的像素面积较小,可以利用图像插值的方法扩充边缘像素点,提高椭圆拟合精度。
3 CCD摄像机的自标定
在基于多视图几何的三维测量过程中,摄像机标定时非常重要的步骤,直接关系着视觉测量的精度,摄像机自标定技术的优点在于摆脱了对标定靶的依赖,测量过程中也不需要复杂的机械结构来控制摄像机的运动,本研究中利用对偶绝对二次曲面的理论进行摄像机自标定[2]。
3.1 绝对对偶二次曲面标定原理
3.2 摄像机自标定方法
由于图像矩阵中的未知量较多,直接利用线形方程进行线形求解可能出现局部最优解的情况,因此可以先标定摄像机的主
点坐标,标定出摄像机的焦距,整体优化摄像机内的参数。
假设主点坐标为[ut,vt]T,令变换矩阵为:

摄像机在拍摄多幅图片之后,可以联系多个方程,得出m×10的系数矩阵,其中m表示拍摄数量,利用射影空间下的对偶二次曲面,结合摄像机的拍摄矩阵,计算出摄像机的内参数矩阵,得出相应的焦距信息。
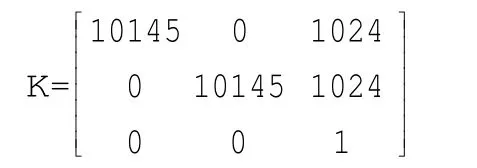
将焦距fu和fv与求出的主点坐标[u0,v0]T组成摄像机内参数的初值K0:
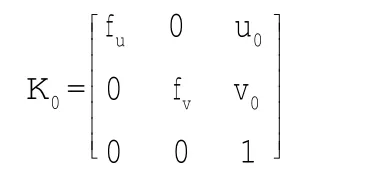
通过对摄像机内参数进行迭代,得出最优解,此种方法对内参数进行优化可以较容易实现收敛。
为了验证摄像机自标定方法的精确性,假设模拟摄像机拍摄过程中获取了5幅模拟图像,来对摄像机的内参数进行标定。先模拟空间点的三维坐标,例如将8个空间点的三维坐标写成齐次坐标矩阵的形式:

之后对摄像机的内参数和外参数进行模拟,假设摄像机的光学镜头为35mm,单像素尺寸3.45×3.45μm。摄像机的内参数矩阵为:
这种标定方法在应用的过程中,在模拟图像坐标中加入0.01-1个不同像素级别的随机噪声,此时得出的摄像机内参数的相对误差较小,该方法具有较好的鲁棒性,只要将标志点中心坐标的定位精度控制在0.1个像素,摄像机内参数的相对误差就会被控制在很小的范围内,在标志点中心点定位精度的误差增大时,摄像机自标定的误差也会增大,利用这种摄像机自标定的方法由于传统的摄像机自标定方法,尤其适用于标志点较少的情况[3]。
4 基于单目视觉的三维测量
三维测量需要在六面体的空间内表现出物体的几何形状、长度和圆周分度,其中涉及到尺寸精度、定位精度和几何精度。在计算机技术不断的同时,由最初的机械式测量逐渐过渡到视觉测量。视觉测量的优点在于非接触、高效便捷,成为当下十分热门的研究领域。多视图几何的三维测量系统主要包括摄像机和计算机,由于摄像机使用数量的不同个,可以将其分为单目视觉测量系统和多目视觉测量系统。本研究重点分析单目视觉的三维测量技术,该技术应用过程中,利用已知内参数的摄像机拍摄出被测特征点,对获取到的图像信息进行处理,提取出拍摄特征点的二维坐标,该方法简单高效、精度高,具有优越的实用性和应用前景[4]。
以Xj表示j号特征点的空间齐次坐标,以Pi表示摄像机在拍摄i号图像时的摄像机矩阵,以表示空间特征点Xj在i号图像上的齐次坐标,以表示空间特征点Xj到i号图像上的摄影深度,即表示物点在光轴方向上的深度,则可以得出:
λi
jPiXj
在三维空间点测量的过程中,一般应用模拟的方法进行,利用MATLAB软件编写模拟实验程序,在300×300×300mm的空间范围内生成50个已知三维坐标的空间点,利用CCD摄像机在大约2m的位置对这些空间点进行拍摄,在模拟图像中随机加入0.1个像素噪声,然后对空间的三维特征点进行测量。测量过程中先利用图像坐标生成测量矩阵,摄像机进行自标定。
统计出不同点的测量误差,得出坐标测量误差的平均值和标准差,如表1所示。

表1 随机空间点的坐标误差的平均值和标准差
为了证明该测量方法的稳定性,重复试验50次,绘制出随机误差的平均值和标准差分布图。将本研究单目视觉测量方法、传统单目视觉测量方法和双目视觉测量方法进行对比,得出如表2的结果。

表2 不同视觉测量方法的对比结果
5 结束语
本研究在总结数字图像处理和获取的基础上,利用CCD摄像机的自标定方法,实现了空间三维点的视图几何测量,不需要利用加工紧密的标定靶和复杂机械,在自标定方法的应用过程中只需要5幅被测特征点,简化了传统摄像机的标定过程,提高了测量的精确性和简便性,这种自标定方法可以应用于工业生产和工程测量领域。
[1]叶声华,王仲,曲兴华.精密测试技术展望[J].中国机械工程,2012,11 (3):262.
[2]黄桂平.数字近景工业摄影测量关键技术研究与应用[D].天津大学,2012,12(1):72.
[3]黄桂平,钦桂勤.大尺寸三坐标测量方法与系统[J].宇航计测技术,2011,27(4):15.
[4]叶声华,邾继贵,等.视觉检测技术及应用[J].中国工程科学,2010,21 (1):26.
TP391.41
A
1673-0038(2015)47-0192-02
2015-11-6
猜你喜欢
测控技术(2018年12期)2018-11-25
传感器与微系统(2018年7期)2018-08-29
中学生数理化·中考版(2017年6期)2017-11-09
非公有制企业党建(2017年10期)2017-11-03
现代兵器(2017年4期)2017-06-02
现代兵器(2017年4期)2017-06-02
中国公共安全(2017年11期)2017-02-06
办公自动化(2016年18期)2016-12-17
新闻前哨(2015年2期)2015-03-11
计算机工程与设计(2014年9期)2014-12-23