锻压专用六轴机器人运动学分析
2015-12-08 02:29邱子浩韩秀姝谷文涌
建材与装饰 2015年47期
邱子浩 韩秀姝 谷文涌
(1.山东泰山抽水蓄能电站有限责任公司山东泰安2.华北水利水电大学电力学院河南郑州)
锻压专用六轴机器人运动学分析
邱子浩1,2韩秀姝1谷文涌1
(1.山东泰山抽水蓄能电站有限责任公司山东泰安2.华北水利水电大学电力学院河南郑州)
本文根据锻压生产现场的实际情况和生产需求,设计了一种基于回转开链结构的六自由度机器人,采用D-H法对六轴机器人进行了运动学分析,得到该结构机器人的运动学方程,并在此基础上利用MATLAB对该机器人的作业空间进行了仿真分析,验证了该机器人在锻压自动化生产中应用的可行性。
锻压自动化生产;六自由度机器人;运动学分析
前言
随着机器人技术的飞速发展,机器人的功能和用途更加广泛,在锻压生产中选用机器人代替传统的人工作业方式也逐步得到推广[1]。我国的锻压生产厂家众多,许多锻压生产厂家已经意识到采用机器人代替传统手工作业的优点和巨大利益空间,这也使得机器人的市场空间得到拓展[2]。本文将针对机器人在小型锻压件生产线的应用进行研究,并采用D-H法对机器人进行运动学分析,通过仿真得到机器人的作业空间,根据仿真结果得到该机器人作业空间与其结构的关系。
1 六轴机器人本体结构
本文设计的锻压用机器人实质是一种搬运机器人,代替人力实现锻压生产中的各种操作。从机构学角度来看,六轴机器人实际上是由六个回转关节连接起来的开链式机械系统,每个关节均采用同步电机驱动,为了增大每个关节的驱动力矩,本文设计的机器人在每个关节的电机上增加行星齿轮减速器,通过同步电机控制机械臂的各个回转关节以调整机械手臂的位姿使其按照给定的轨迹运动,完成锻压操作的各项任务。本文设计的六轴机器人机械本体由底座、腰部旋转关节、后臂、小前臂、前臂、腕部旋转关节和末端执行器旋转关节构成,如图1所示。
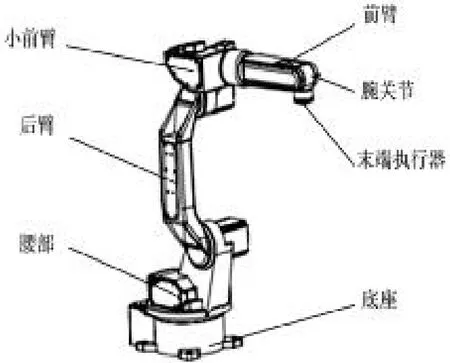
图1 锻压用六轴机器人本体结构图
2 六轴机器人的正运动学
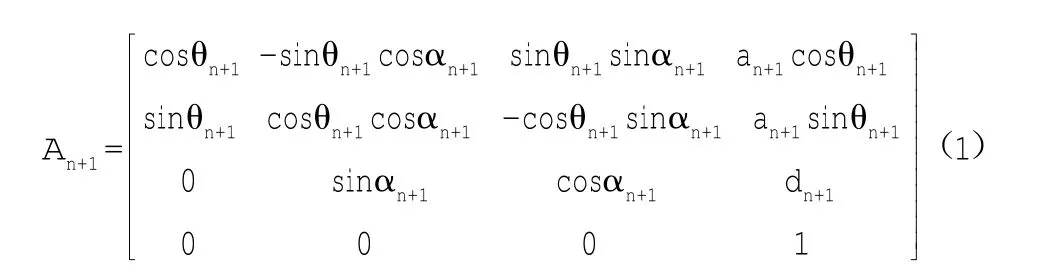
由于六轴机器人的各个关节均由回转关节组成,因此本文中采用D-H法进行六轴机器人的运动学分析。在D-H法中,在分析任意机器人机构时,首先建立基坐标系,然后在机器人的每个关节上都建立一个关节坐标系,并指定上一关节的关节坐标系为其参考坐标系,根据齐次变换原理确定从一个关节坐标系到下一个关节坐标系的变换步骤[3],用矩阵表示为:
从基座到第一个关节,再从第一个关节到第二个关节依次做齐次坐标变换,得到机器人的总变换矩阵[2],因此,从机器人的基坐标系到末端执行器的变换矩阵为:

式中:An代表由关节n-1到关节n的变换矩阵,n代表了关节总数。
根据D-H法首先建立图2所示的六轴机器人的参考坐标系。
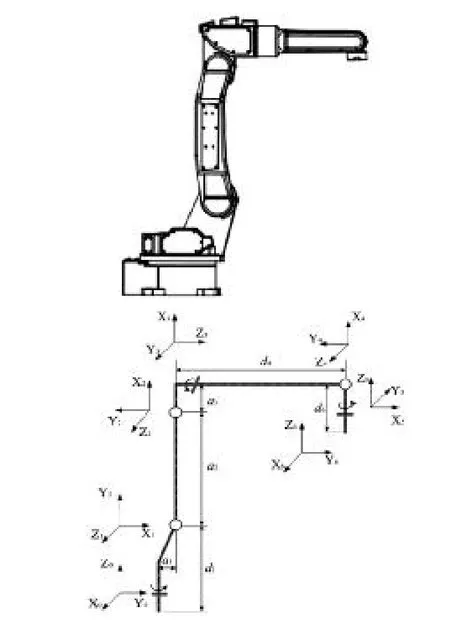
图2 六轴机器人的参考坐标系
从关节一开始,轴Z0表示第一个关节的旋转轴线,依次类推,轴Z6表示末端执行器的运动轴线,需要注意的是运动方程中通常不含末端执行器,但是包含了末端执行器的坐标系,根据建立的机器人参考坐标系列出机器人的D-H参数,建立参数表,如
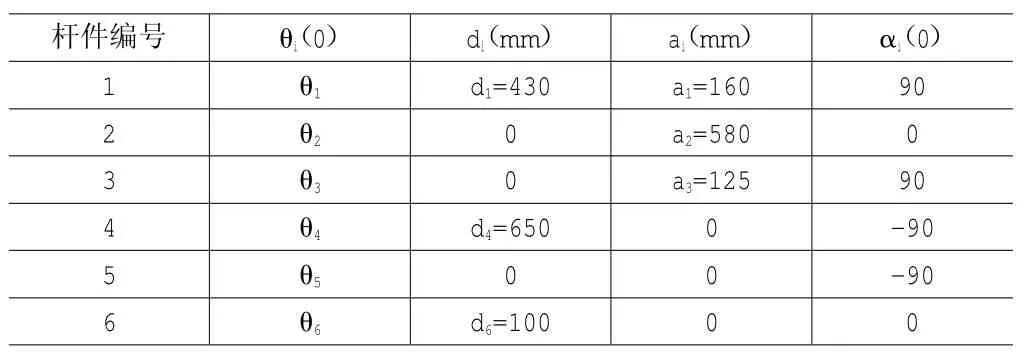
表1 六轴机器人D-H参数表
将参数表中的数据代入公式(1),得到相邻关节之间的变换矩阵依次为:表1所示。
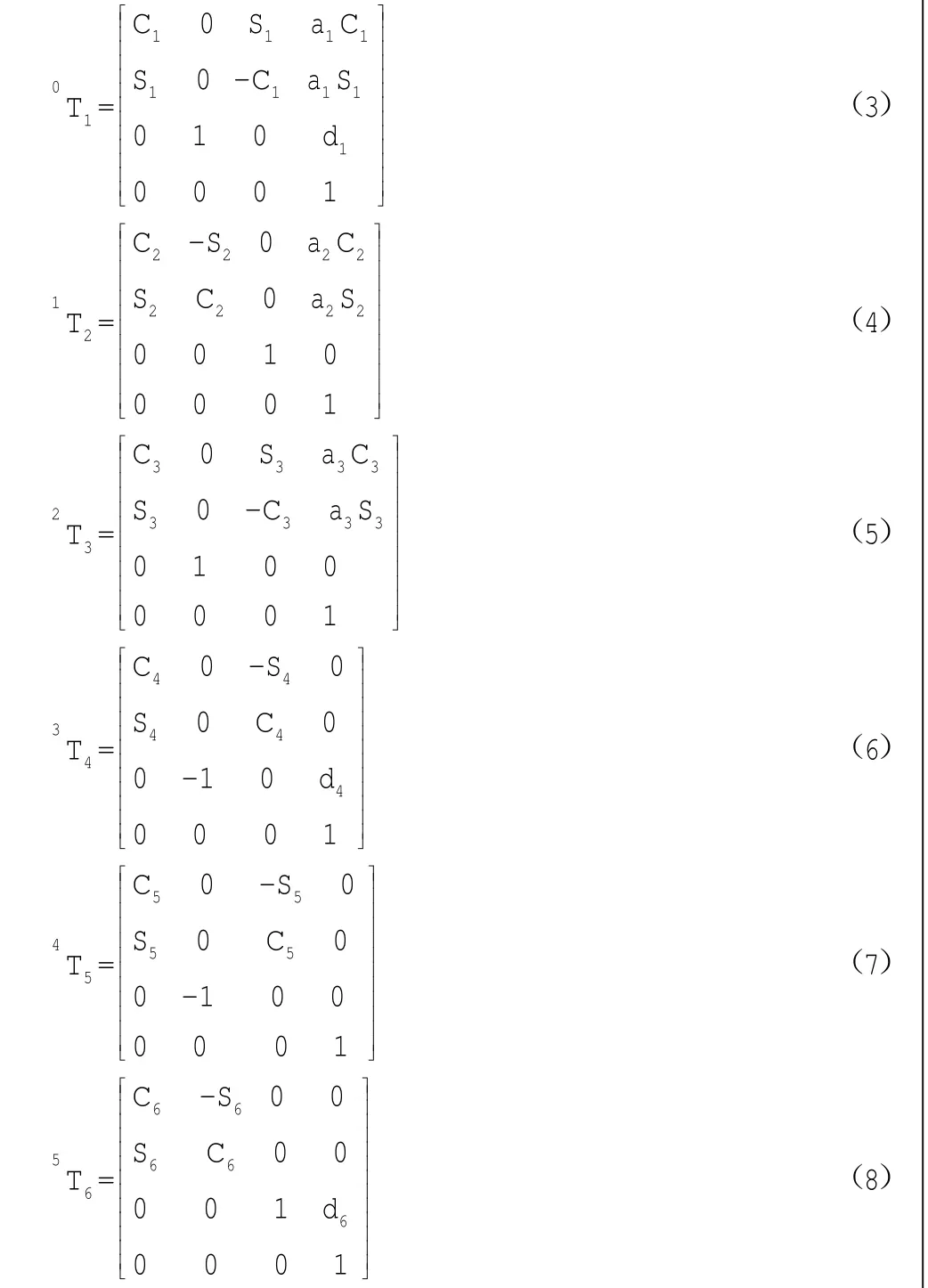
机器人从基座到末端执行器的总变换矩阵为:
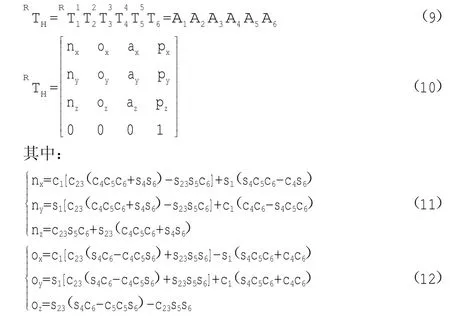
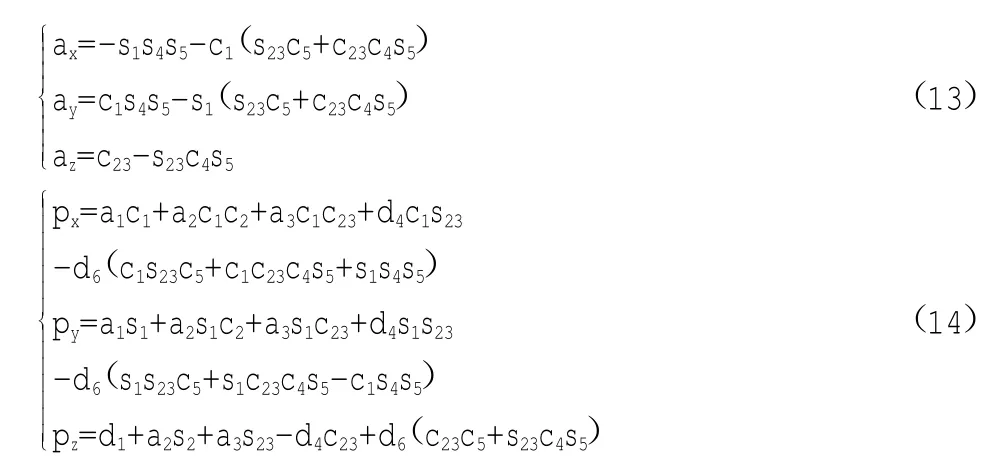
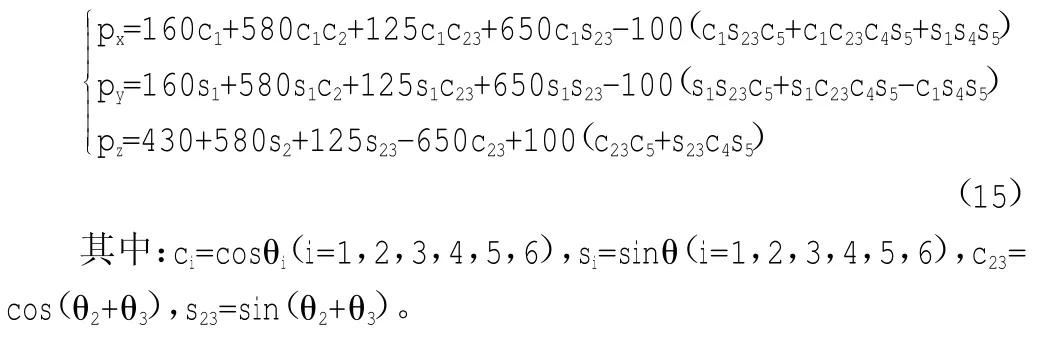
将参数表中的具体参数代入式(14),得到机器人末端执行器相对于基坐标系的位置方程:
3 六轴机器人作业空间分析
机器人的作业空间可以直观的反映出机器人可以达到的空间范围[4],还可以分析机器人的运动空间是否存在空穴,并且可以根据机器人的作业空间规划机器人的工作路径,在本文中,利用MATLAB对机器人的作业空间进行仿真。
式(15)表达的是机器人末端执行器相对于基坐标系的位置关系,方程中每个变量的范围均已知(表2所示),利用MATLAB编程绘制出机器人的二维作业空间和三维作业空间。
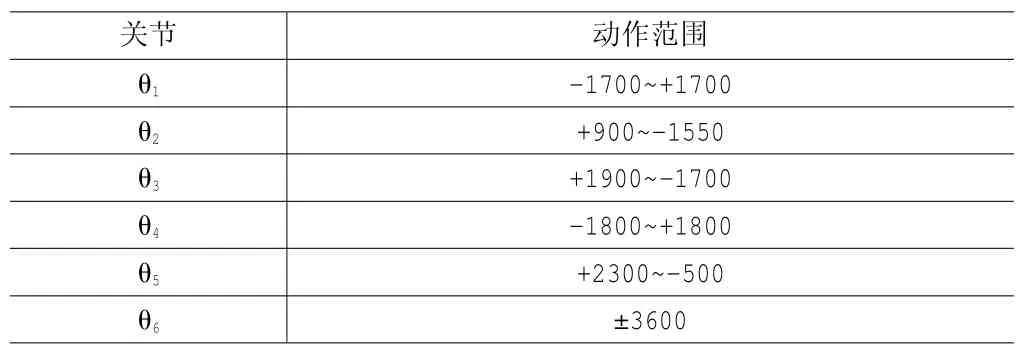
表2 六轴机器人关节最大动作范围
通过作业空间的仿真图3和图4可以看出,机器人的空间作业范围是一个球体,球体中心有部分空间存在空穴现象,即机器人运动时无法到达的区域,这种现象是由机器人本体结构造成的,机器人在运动时由于手臂的结构尺寸,在运动到某些位置时会出现干涉,这些干涉位置的存在导致了图4中空穴,因此机器人的结构越紧凑出现的空穴会越小,机器人可以到达的作业空间也越大。
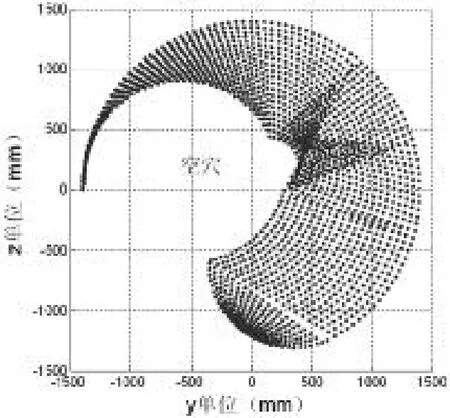
图3 机器人YOZ平面作业空间

图4 机器人三维作业空间
本文采用D-H法对锻压用六轴机器人进行了运动学分析,得到该机器人的正运动学方程,并对机器人进行了作业空间的求解,本文认为,将该六轴机器人非常适合应用于锻压自动化生产线。
[1]王运赣.机器人在锻压生产中的应用[J].锻压机械,1984(1):55~65.
[2]陈幼曾.锻压加工采用机器人作业的前景[J].机器人技术与应用,2001 (1):21~24.
[3]何雪涛,程源,黄钟,杨卫民.奇次坐标变换在空间机构分析中的应用[J].北京化工大学学报,1999,26(1):4~6.
[4]程永伦,朱世强,罗利佳,刘松国.基于QJ-6R焊接机器人运动学分析及仿真[J].机电工程,2007,24(11):107~110.
TP242
A
1673-0038(2015)47-0133-03
2015-11-8
邱子浩,山东临沂人,高级运维专责,在职研究生。
猜你喜欢
计算机应用与软件(2021年12期)2021-12-14
河北省科学院学报(2020年1期)2020-05-25
测控技术(2018年12期)2018-11-25
制造技术与机床(2018年11期)2018-11-23
汽车实用技术(2018年3期)2018-03-06
制造技术与机床(2017年9期)2017-11-27
电力安全技术(2017年6期)2017-07-31
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16
海军航空大学学报(2015年1期)2015-11-11