深水潜堤施工的水下定位与检测技术探讨
2015-12-08 01:56:33石峰
中国港湾建设 2015年12期
石峰
(上海达华测绘有限公司,上海200136)
深水潜堤施工的水下定位与检测技术探讨
石峰
(上海达华测绘有限公司,上海200136)
以长江口12.5 m航道整治的潜堤施工为研究对象,采用超短基线实时测量、水下三维声纳实时跟踪、侧扫声纳工后检测等测量技术手段,阐述了深水区铺排、砂袋抛放、抛石施工定位及检测的作业工艺。通过分析为深水区的潜堤施工提供了准确、便捷的测量手段,对同类作业有一定的指导意义。
深水潜堤;水下定位;超短基线;三维声纳;检测
0 引言
随着长江口12.5 m航道整治工程的展开,深水潜堤的施工给水下铺排、抛石护坡及袋装砂抛放的测量定位、过程监测及工后的检测提出了挑战。如何准确、快速、经济地完成水下潜堤的施工测量作业成为项目实施的核心。
利用超短基线水下实时定位跟踪、水下三维声纳实时扫描及侧扫声纳工后检测等技术[1-4],结合施工区的水深、分层流速等信息进行铺排、水下袋装砂(或网兜石)抛放的定位测量与实施监测,为深水区水下铺排、抛石、抛砂袋的准确施工提供新的技术手段,有利于项目的快速、准确、高效实施,有利于推动行业的技术进步。
1 项目实施难点
1.1 施工区环境及施工作业特点
1)水流速度快,最快的流速可达3.0 m/s。
2)水深深,潜堤施工区域的水深超过40 m。3)排布宽,水下受力明显。
4)抛石网兜、砂袋水面抛放后受水流作用发生漂移。
5)施工后的检测难度高,传统的检测手段难以实施。
1.2 施工测量难点
1)深水、高流速情况下软排体位置动态实时监测。
2)抛石体、袋装砂抛放过程中的状态及漂移距离的检测。
3)排体铺设好以后的水下检测。
4)抛石体、袋装砂施工结束后的断面检测。
2 解决方案及实施工艺
2.1 深水软体排铺设施工测量解决方案及工艺
2.1.1 深水软体排铺设施工测量解决方案
软体排的施工测量工作共分为两部分:施工过程中的动态监测和工后排体位置及搭接状态的检测。
1)过程监测
软体排施工的过程监测与水下实时定位同步进行,利用超短基线水下实时定位技术完成。超短基线的水下定位信标固定安装在软体排的边缘,发射接收机固定安装在施工船的一侧。铺排施工过程中,通过实时接收水下信标的定位信息来反映软体排的水下实时位置及运动轨迹,施工人员根据铺排软件反映出的实际位置与设计位置的偏差,及时进行调整,确保铺排施工的准确定位。当排体铺设到水底后,水下信标随排体落在水底,再次测量水下信标的位置,从而准确获取排体的最终位置。
2)工后检测
软体排的工后检测主要检测排体最终的位置及水下形态,是否发生卷角、折叠以及搭接是否满足要求等。传统的水下排体检测主要采用浮球倒垂法加人工潜摸的方式,精度低、安全风险高。针对该区域水深流急的特点,采用侧扫声纳进行软体排的水下检测。
2.1.2 超短基线铺排施工测量工艺
1)测量定位原理
超短基线测量系统主要由发射接收单元(俗称水声换能器)及水下应答信标两部分组成。换能器探头里有多个水听器,按三角形布阵,水听器之间距离只有几厘米。系统是根据声波在水中传播的往返时间及声速来测量水声换能器到水下信标的距离(S=vt/2);利用安装在水声换能器探头中的多个水听器接收阵接收水下信标应答信号的相位差来确定发射接收机相对船首的方位。
2)施工测量工艺
铺排测量使用超短基线测量系统如图1所示。其中操控室内安装有2套控制单元及1套铺排软件施工作业系统。2组超短基线定位系统分别接收固定在排体两侧信标所发出的回声信号进行定位,系统将两组数据进行坐标转换形成符合施工要求的坐标数据,通过后处理软件及实时显示平台监测排体在水下的位置信息,对铺排作业过程进行监控,对铺设好的水下排体进行准确定位。

图1 超短基线铺排作业水下定位系统示意图Fig.1 The underwater positioning system of mattress laying work by ultra-short baseline
深水作业时定位信标一般有8~12个。施工时将信标固定在排体的边缘,每2个为1组,对称分布在排体的两边,分4~6组循环使用,每组间距10~30 m。当某一组水下信标到达水底稳定后,测量其最终坐标并释放回收该设备,继续进行下一组的测量,如此循环完成整个排体的施工定位及监测。在施工过程中,通过铺排软件的坐标成图、比对、报警功能实现排体铺设的测量控制,为下一张排体的铺设、搭接提供准确的数据成果。
2.1.3 软体排的工后检测工艺
1)侧扫声纳测量原理
侧扫声纳系统是基于回声探测原理进行水下目标探测。通过系统的换能器基阵以一定的倾斜角度、发射频率,向水底发射具有指向性的宽垂直波束角的脉冲超声波,声波传播至水底或水底目标后发生反射和散射,又经过换能器的接收基阵接收水底的反射和散射波,经过仪器的处理,用显示装置显示,用记录器储存,工作时换能器按一定的频率发射和接收声波,并得到一系列回波。由于换能器基阵收到水底各点回波的时间有先后之分,故通过模数转换电路以声图形式显示、记录。当声波传播距离越远时,换能器接收到的回波的时间就越长,从而反映出水底排体的位置及阴影信息。扫测排体的工作原理如图2所示。
2)侧扫声纳检测软体排的测量工艺
首先将RTK-DGPS、侧扫声纳拖鱼安装在测量船上,利用专用的扫测软件进行测量,如图2所示。如果水下铺设的软体排有下陷或堆积现象,扫测时该区域没有声波返回,图像就会产生阴影,
也就可以反映出水下软体排的铺设情况。利用侧扫声纳进行排体铺设好以后的位置及状态检测可以达到事半功倍的效果,已在长江口、南通及洋山等多个铺排施工项目中实际应用。图3是侧扫声纳在长江口12.5 m航道整治白茆沙项目中的检测成果。

图2 侧扫声纳扫测排体示意图Fig.2 Sketch of sweeping the mattress by side scan sonar
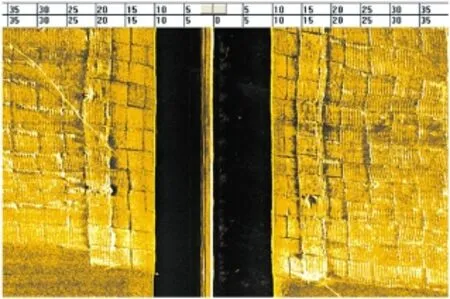
图3 混凝土连锁片排侧扫影像Fig.3 Sweeping image ofconcrete chain blocks
2.1.4 超短基线及侧扫声纳的测量检测优点
1)可对施工中的水下排体实现实时动态定位及监测,速度快、效率高,可实现铺排施工的动态控制。
2)检测手段简单,风险小,不用配备专用的检测船及专业的潜水员,成本费用较低。
3)检测精度高,信息量丰富,有利于数据成果分析处理。
4)不受水深及排体检测点多少的影响,易于实现全覆盖检测,检测质量高、风险小。
2.2 袋装砂及网兜石抛放施工的测量解决方案与工艺
2.2.1 测量解决方案
袋装砂及网兜石(以下统称抛放体)受水流作用会随水流漂移,漂移距离与水的分层流速、水深、下放角度等有关,准确测量并计算其漂移距离是确保施工质量的关键。
如图4所示,在施工作业船上同时安装水下三维声纳测量系统及超短基线测量系统,在抛放体上拴系可回收的水下定位信标,利用超短基线的测量定位功能实时监测砂袋及抛石体的水下位置状态,从而确定抛放体的水下移动距离,为施工作业提供预抛量。利用水下三维声纳对抛放体进行实时三维扫描,测量其水下运动形态,为施工抛放方式改进提供依据。

图4 水下抛放体检测示意图Fig.4 Detection ofthrowing the stone in water
2.2.2 水下三维声纳的测量原理
利用英国CodaOctopus公司生产的EchoScope三维声纳,整个三维声纳测量系统配备了高精度的三维姿态仪、罗经及GPS等,可安装在测量船或水下机器人上进行动态实时测量。系统利用声学相控阵技术可在水平及垂直视场(50°×50°)内同时形成16 000个波束(横向128×垂向128),距离探测精度可达4 cm。
2.2.3 检测工艺流程
在水下潜堤整体施工前进行典型的预抛施工,并准确测量抛放体在水下的实际漂移距离,为后续大批量水下抛放施工提供依据。抛放前需要做好以下工作。
1)利用ADCP测流设备测量施工区从水面到水底的各水层流速。
2)抛放体上拴系带回收功能的水下定位信标。3)测量或计算抛放体的体积。
抛放体入水后,利用超短基线及水下三维声纳测量其水下实时的位置及动态,量测并分析其水下移动轨迹,建立水层流速、抛放体体积、水深与抛放体漂移距离的数学模型。
典型抛放施工结束后,根据建立的数模,输
入施工时的水流、水深、抛放体体积等相关数据信息,比较准确地估算出抛放体沉入水底后的实际位置。抛放过程中仍采用水下三维扫描声纳进行监测,准确测量抛放体的水下实际位置。
2.2.4 砂袋及网兜石工后检测
砂袋及网兜石的检测主要是抛放到位后的断面检测及水下状态检测,采用高精度水下三维声纳来完成,通过三维声纳可获得砂袋及网兜石水下三维数据信息,形成详细的数据成果及图像成果。图5是利用水下三维扫测水下混凝土方块的三维图像,其图像的分辨率达到厘米级。

图5 三维声纳测量数据影像图Fig.5 3D sonar measurement image
根据三维声纳测量获得的三维水深数据,可以绘制水下潜堤的纵横向断面图。由于三维声纳是全断面、全覆盖的测量,测量数据信息丰富,可根据其测量结果对特征点、特殊断面进行有针对性的分析,从而确保潜堤的施工质量。
3 结语
在流速较快的深水区进行潜堤施工存在许多技术难题,国内外鲜有参考及报道的先例,对水下潜堤施工进行全面、准确的动态监测及实时监测是一项技术挑战。
超短基线测量定位技术、三维声纳扫测技术、侧扫声纳检测技术等在深水潜堤施工中的综合应用,为水下潜堤施工的过程实时监测、工后状态检测提供了有效的检测手段,其安全性、准确性、高效性将为深水作业区的水下施工提供重要保障,可为同行业的施工检测提供参考。
[1]焦永强,田维新,潘贤亮.超短基线测量技术在铺排施工中的应用[J].中国港湾建设,2013(3):60-62. JIAO Yong-qiang,TIAN Wei-xin,PAN Xian-liang.USBL Survey technology in laying geotechnicalfabric mattress[J].China Harbour Engineering,2013(3):60-62.
[2]唐利娜.水下三维声成像及声纳图像处理技术研究[D].哈尔滨:哈尔滨工程大学,2009. TANG Li-na.Technical research on 3D underwater acoustical imagingand sonarimages processing[D].Harbin:Harbin Engineering University,2009.
[3]唐秋华,吴永亭,丁继胜,等.RTK GPS在超短基线声学定位系统安装校准中的应用[J].海洋测绘,2005,25(5):40-42. TANG Qiu-hua,WU Yong-ting,DING Ji-sheng,etal.Calibration of ultra shortbaseline acoustic positioning system using RTK GPS [J].Hydrographic Surveying and Charting,2005,25(5):40-42.
[4]田坦.水下定位与导航技术[M].北京:国防工业出版社,2007:27-45. TIAN Tan.Underwater positioning and navigation techniques[M]. Beijing:National Defence Industry Press,2007:27-45.
Discussion on underwater positioning and detecting technology of deep submerged breakwater construction
SHIFeng
(ShanghaiDahua Surveying&Mapping Co.,Ltd.,Shanghai200136,China)
Taking the submerged breakwater construction for 12.5 m waterway regulation at the Yangtze Estuary as the research object,we used measurement techniques such as ultra-short baseline real-time measurement,underwater 3D sonar real-time tracking,and side scan sonar survey after work,expounded the operation process of deep water mattress laying, sandbag arrangement and location of riprap and measurement.This paper provides accurate and convenient measurement method for deep water submerged breakwater construction,and has certain guiding significance for the same works.
deep submerged breakwater;underwater positioning;ultra-short baseline;3D sonar;detection
U617
A
2095-7874(2015)12-0062-04
10.7640/zggwjs201512015
2015-07-30
石峰(1964—),男,上海市人,高级工程师,测量工程专业。
E-mail:490729930@qq.com
猜你喜欢
军事文摘(2024年4期)2024-01-09 09:07:58
上海交通大学学报(2021年2期)2021-03-02 10:17:22
军事文摘(2020年24期)2020-11-29 06:35:54
考试与评价·八年级版(2020年5期)2020-10-29 05:42:35
装备制造技术(2020年12期)2020-05-22 09:24:54
电子测试(2018年14期)2018-09-26 06:04:12
铁道通信信号(2018年3期)2018-04-19 02:32:56
火控雷达技术(2016年2期)2016-02-06 02:29:03
长春理工大学学报(自然科学版)(2015年4期)2015-12-07 06:57:06
水道港口(2015年1期)2015-02-06 01:25:45