
一种改进的合成孔径激光雷达成像算法
2015-12-07 06:58:34王雪岩徐浩纹许佳斌杨进华刘明远
长春理工大学学报(自然科学版) 2015年3期
王雪岩,徐浩纹,许佳斌,杨进华,刘明远
(1.长春理工大学 光电工程学院,长春 130022;2.中国人民解放军装甲兵学院,蚌埠 223050)
合成孔径激光雷达(Synthetic Aperture Ladar,SAL)是一种通过较小的雷达孔径就能够实现高分辨率成像的高灵敏度激光雷达。近几年来,对于SAL的成像算法以R-D算法为主,但是R-D算法不能满足SAL产生高分辨率成像。本文提出一种算法,即通过基于时间的傅里叶变换对回波信号进行补偿和距离徙动校正。用这种方法对目标做了仿真实验,得到了良好的结果。
1 SAL回波信号分析
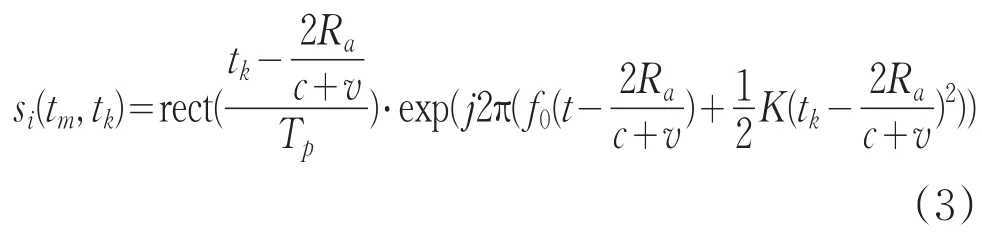
SAL成像系统与SAR成像系统的成像原理大体相同,但是SAL成像系统的光源是用激光来代替原来的微波,因此,SAL对目标的方位分辨率和距离分辨率均获得很大改善。提高发射平均功率可以同时满足远距离探测和高分辨率成像,因此需要SAL发射极大带宽的线性调频激光信号来实现对目标成像,发射信号的表达式为:

式中:tm为合成孔径上的慢时间采样序列,tk为合成孔径上的快时间采样序列,Tp为脉冲宽度,f0为信号的初始频率,K为线性调频率,信号带宽B=KTp。
雷达平台和被探测物体的距离是随着雷达平台沿方位向运动而不断改变的。假设i为目标上任一散射点,延时时间τi后,雷达平台与被探测物的距离为Rt,第i个散射点的回波信号可表示为:

回波信号是通过光外差探测的方法探测得到的。参考距离为Rref,延时参考时间为τref=2Rref/(c+v),参考本振信号是:

光外差探测后得出的差频信号为:

2 改进的成像算法
传统的R-D算法是SAL成像算法中最常用的算法之一。R-D成像算法理念就是将SAL外差探测后的一个二维信号转换成两个一维信号进行计算,这种方法简化了计算过程。但是R-D算法不能满足SAL产生高分辨率成像。所以本文将对于外差探测后的信号进行如下变换。

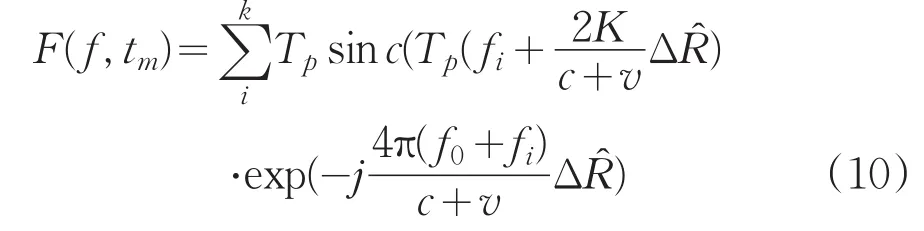
在单个脉冲期间,利用光外差探测使得回波信号变为单频脉冲,并且它相对本振信号的时间差和回波的频率成正比,是解线频调信号,所以,通过解线频调脉冲压缩技术,以本振信号的时间为基准做傅里叶变换后可得:于各个回波的sinc状脉冲,脉冲分辨率为,距离分辨率为 ρr=c/2B ,峰值处于 fr=-K(τ-τc),式(6)中的三个相位项中,第一项是雷达平台和被探测物之间的相对运动,从而形成的多普勒项,叫做方位向项;第二项变为斜置项,影响方位向的成像处理,它表明不一样时间的回波是相互错开的,所以需要将斜置项去除。第三项RVP项需要补偿。所以式(6)可写成:

由(6)可知,傅里叶变换之后频域内会获得对应

相位补偿后距离向数据为:

因为参考点到达雷达平台的距离和不同的散射点于t时刻到达雷达平台的距离存在差异,远离参考点的散射点之间会有距离徙动。
经过补偿后,可以得出:
很明显,距离频域补偿因子为:


把公式(12)代入公式(11)作变量代换得出,公式(12)中以tm为因变量。最后一个相位和 fi无关,说明延迟被消除。但是通过这次变量代换,由于在t-tm时间域采样点会出现梯形格式的缘故,采样点不能对被探测物信号做出二维付立叶变换得到它的二维成像,所以可以将t-tm时间域的采样点由梯形格式变换成矩形格式从而进行二维目标成像。
3 仿真实验
根据之前描述的SAL成像算法,我们用经典机载合成孔径激光雷达平台,表1所示为SAL的基本参数,图1所示为目标模型。
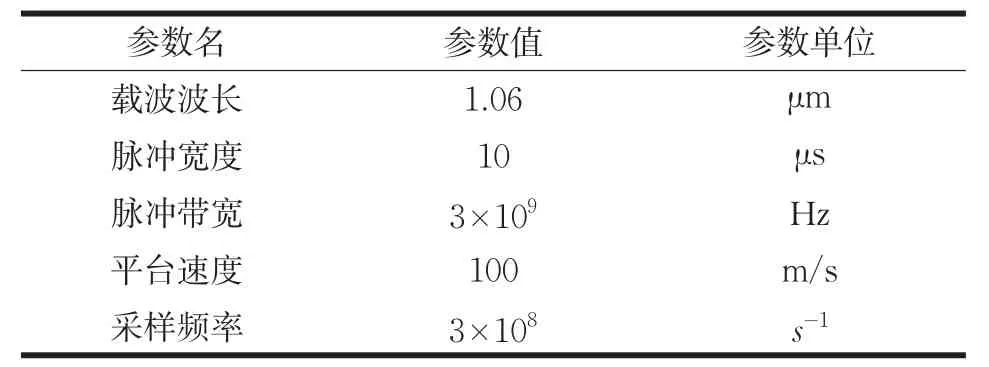
表1 仿真参数表

图1 目标模型
在经过运动补偿之前,由于受到信号的极高载频和极大带宽会严重影响目标的一维距离图像,使得目标的一维成像产生展宽和移位,这导致无法获得清晰的目标二维图像。进行了运动补偿了的一维距离向结果如图3所示,各个峰值点之间都得到了比补偿之前更好的区分。理论上能够实现较为清晰的二维图像。
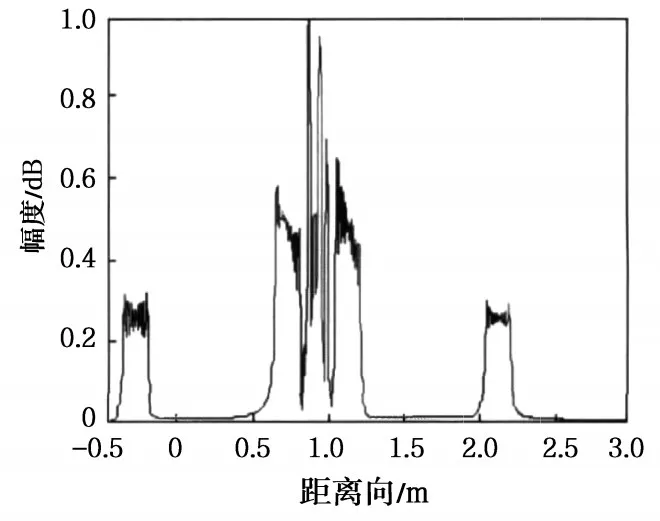
图2 运动补偿前目标一维距离向结果

图3 运动补偿后目标一维距离向结果
在没有运动补偿的时候,其二维图像发生了图4所显示的混叠,左右两端两组距离较近的点与点之间无法分辨,这将大大加深了目标识别的难度。在经过运动补偿之后,目标图像中只有最右侧的两个离参考点较远的散射点无法识别,如图5所示。
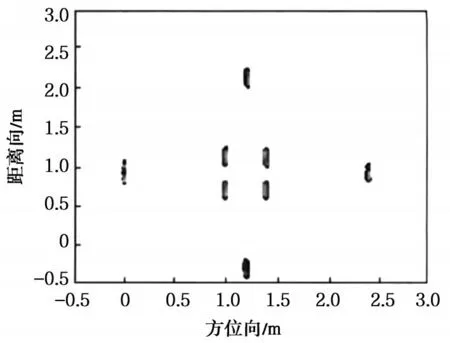
图4 补偿前二维成像
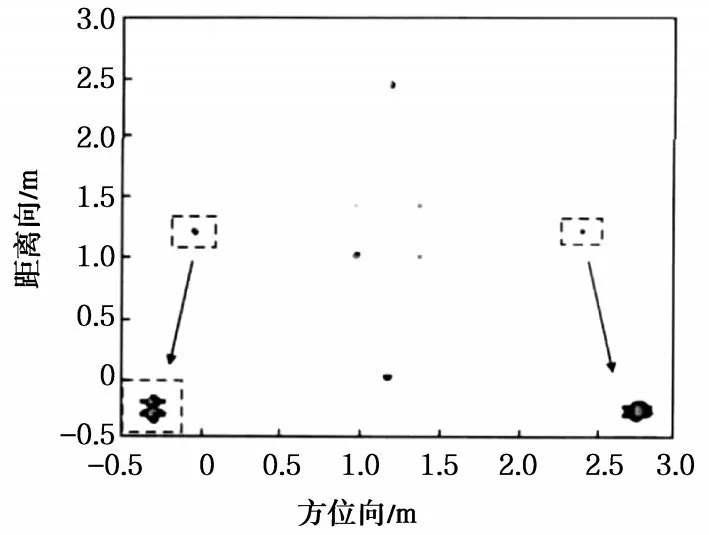
图5 补偿后二维成像
4 结束语
SAL具有很高的灵敏度,可以用小孔径来实现较高的分辨率图像。本文提出一种算法,能够解决传统的成像算法R-D算法不能实现目标图像高分辨图像的问题,并得到了较好的结果。
[1]弋宁.合成孔径激光雷达成像仿真实验研究[D].西安:西安电子科技大学,2011.
[2]郭亮,马瑜杰,唐禹,等.合成孔径激光雷达旋转目标成像[J].红外与激光工程,2009,38(4):637-642.
[3]郭亮,邢孟道,梁毅,等.合成孔径激光雷达成像算法[J].光子学报,2009,38(2):448-452.
[4]Robert L Lucke.Synthetic aperture ladar simulations with phase screens and fourier propagation[C].IEEE Aerospace Conference Proceedings,2004:1788-1798.
[5]李番,邬双阳,郑永超,等.合成孔径激光雷达技术综述[J].红外与激光工程,2006,35(1):57-59.
猜你喜欢
探测与控制学报(2024年1期)2024-03-11 11:11:24
北京测绘(2022年5期)2022-11-22 06:57:43
组合机床与自动化加工技术(2021年11期)2021-11-29 10:46:58
汽车观察(2021年8期)2021-09-01 10:12:41
潍坊学院学报(2021年2期)2021-07-22 07:59:24
电脑知识与技术(2019年13期)2019-07-08 02:23:41
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
声学与电子工程(2018年1期)2018-04-27 02:46:43
浙江大学学报(工学版)(2015年1期)2015-03-01 01:17:23
