
附加气室容积可调空气悬架模糊控制研究
2015-12-07 02:54周扬扬
重庆理工大学学报(自然科学) 2015年10期
江 洪,钱 宽,孔 亮,周扬扬
(江苏大学机械工程学院,镇江 212013)
半主动悬架可以通过实时调节弹簧刚度或减震器阻尼来提高车辆的行驶平顺性和操纵稳定性,其性能接近主动悬架,且具有控制方便、成本低、可靠性高等诸多优点[1-3]。本文以附加气室容积可调的空气弹簧构成半主动悬架,悬架的刚度可以通过切换不同容积的附加气室进行调节,具有刚度调节效果好、结构简单、控制方便的优点。2011年至今,江苏大学的李仲兴教授[4-6]对1/4车辆附加气室容积可调空气悬架进行了大量特性仿真和试验,研究发现当附加气室与空气弹簧的容积比大于1.5时,附加气室已不具备调节弹簧刚度的能力,但有关基于此特性的整车控制研究的报道还不多见。2013年,江苏大学的黄定师[7]设计了1/4车辆附加气室容积可调空气悬架的决策控制器。该控制器以典型工况下的优化计算为基础,并不能覆盖车辆的所有工况,控制效果有待提升。1/4车辆模型并不能全面反映整车振动情况,且对该系统的研究大多停留在特性研究阶段,对于整车附加气室容积可调空气悬架的控制研究还处于空白。
空气悬架为典型的非线性系统,经典控制理论和现代控制理论不能直接运用于该系统,而模糊控制并不依赖被控对象的数学模型,在多变量非线性系统中应用广泛[8-10]。本文通过建立整车附加气室容积可调空气悬架模型,设计整车模糊控制器,旨在通过调节附加气室容积提高车辆在多工况下的行驶平顺性。
1 整车悬架模型
1.1 附加气室容积可调空气弹簧模型
附加气室容积可调空气弹簧模型主要由空气弹簧、连接管路、容积可调附加气室和电磁阀等4部分组成,如图1所示。
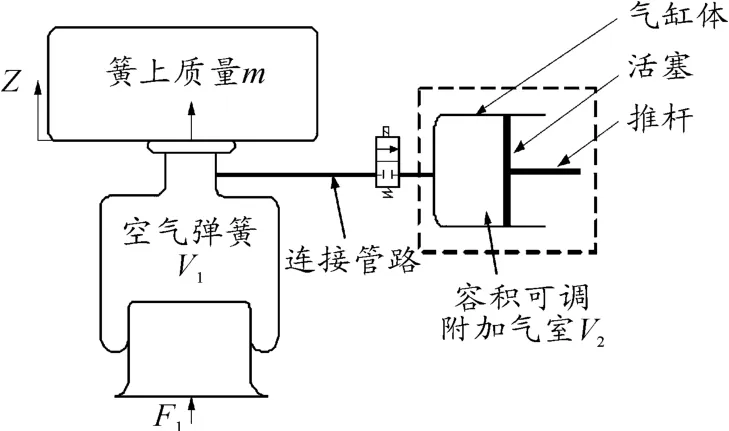
图1 附加气室容积可调空气弹簧模型
动态空气弹簧力F是由气囊内压缩气体的弹力组成,其表达式为

式中:P1为空气弹簧内气体的绝对压力;P0为大气压力;Ae为空气弹簧有效截面积。
当空气弹簧受到外部激励F1时,空气弹簧和附加气室内的气体相互流动交换。假设忽略气体的位能和动能,且气体处于绝热状态,则根据热力学第一定律可得空气弹簧的能量守恒方程[11]:

式中:dU1为空气弹簧热力学能增量;dH1为交换气体带出空气弹簧的焓;δW1为空气弹簧对外界做的功。
根据工程热力学理论,分别将 dU1,dH1,δW1的表达式代入式(2)中进行计算,最终可得空气弹簧内气体绝热状态方程:

式中:P1为空气弹簧内气体绝对压力;V1为空气弹簧容积;m1为空气弹簧内气体质量;k为绝热指数;const是和空气弹簧内初始气体状态有关的常数。
附加气室和空气弹簧内气体状态类似,空气弹簧和附加气室内气体状态方程可通用,因此附加气室内气体绝热状态方程为

式中:P2为附加气室内气体绝对压力;V2为附加气室容积;m2为附加气室内气体质量;const是和附加气室内初始气体状态有关的常数。
连接管路中的气体流量特性与空气弹簧的动态特性密切相关,根据流体力学和空气动力学理论推导可得连接管路两端的流量关系表达式为
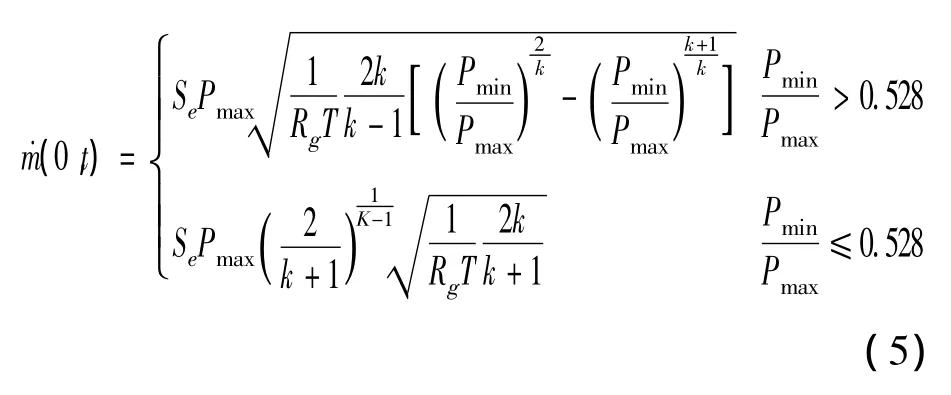
式中:Rg为管路摩擦阻力系数;Pmax=max(P1,P2);Pmin=min(P1,P2);P1,P2为连接管路两端的气压;T为对应Pmax端的气体温度;Se为连接管路的有效流通面积。
1.2 整车悬架模型
由于附加气室容积可调空气弹簧刚度的非线性,将上述建立的弹簧模型以弹簧力的形式引入整车悬架模型,以减少建模误差。整车悬架模型如图2所示,其中:mcb,mb分别为车身和座椅质量;Zcb,Zc分别为车身质心处和座椅处的垂直位移;Kc,Cc分别为座椅的刚度和阻尼系数;Jx,Jy分别为车身侧倾和俯仰转动惯量;θ,φ分别为车身侧倾和俯仰角位移;lf,lr分别为前后轮至车身质心横轴的水平距离;d为左右车轮轮距;qi,Ki,mi,Zi,Fei,Ci分别为路面激励、轮胎刚度、簧下质量、簧下质量垂直位移、可控弹簧力(由附加气室容积调节)、减震器阻尼系数(i=1~4)。
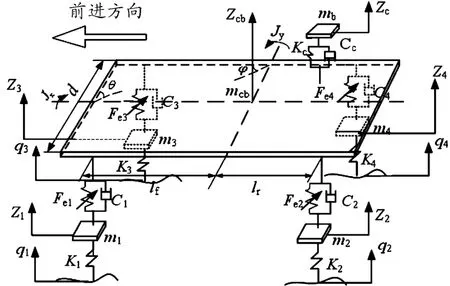
图2 整车空气悬架模型
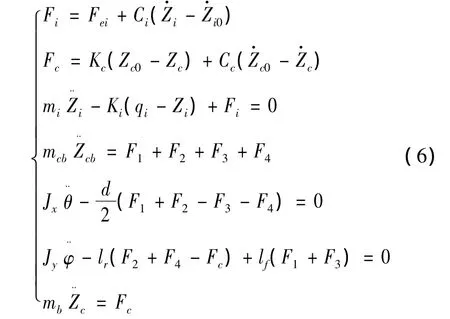
假设4个悬架、座椅和车身连接处的作用力和垂直位移分别为 Fi,Fc,Zi0,Zc0,对簧下质量、车身和座椅分别运用牛顿第二定律,可得其运动方程:
为保障混凝土工程质量,项目小组建立责任质量管理体系,严格落实质量三级检查规范,实现对施工过程的科学控制。在具体施工过程中,有关部门建立独立的质量控制部门,为项目配置足够的技术人员、质量人员,在配比、浇筑过程中进行监督、检查,并做好质量检验记录。混凝土搅拌过程中添加了粉煤灰、高效减水剂,应用双掺技术保障混凝土配比的科学性,改善混凝土特性,使其抗裂能力可有效增加。在运输浇筑过程中,尽力减少倒运次数以混凝土运输缩减时间,并做好混凝土的科学保存。
2 模糊控制器设计
模糊控制器的设计核心是找到被控对象的相关操作经验或测试数据[12],以此来编辑模糊控制规则。模糊控制器的主要设计流程如图3所示。
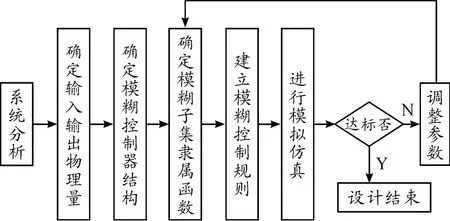
图3 模糊控制器的主要设计流程
2.1 前后悬架附加气室容积匹配
模糊控制的目的是通过调节附加气室容积来提高车辆在多工况下的行驶平顺性。定义前悬架的附加气室容积为Va1,后悬架的附加气室容积为Va2,通过仿真发现调节Va1和Va2对于轮胎动载荷并没有太大影响,在此重点考虑Va1和Va2对于后排座椅加速度和前后悬架动行程的影响。
通过Matlab/Simulink中的for循环算法来探寻Va1和Va2的最佳匹配关系,使得后排座椅加速度和前后悬架处的动行程保持理想状态,循环步长设为0.5 L。
车身载荷为满载、车轮在A级路面80 km/h白噪声激励下,后排座椅加速度均方根值、前悬架和后悬架动行程均方根值随附加气室容积变化规律如图4~6所示。图4~6中的二维图为对应的三维图在其二维平面上的等高值投影。
降低座椅加速度可有效提高车辆的行驶平顺性,但是过大的悬架动行程会导致车身撞击限位块的概率增加,同样会导致平顺性变差。理想状态是希望座椅加速度和悬架动行程同时取得最小值,但是通过以上分析可知Va1和Va2的最优取值范围并不完全重合,因此需要人工选择特定工况下的综合最优区域,选择的侧重原则为:当路面状况比较好时(A级、B级),综合最优区域的选取侧重于座椅加速度的最优区域;当路面状况比较差(C级),悬架动行程急剧恶化时,综合最优区域的选取应侧重于悬架动行程的最优区域以减小车身撞击限位块的概率。因此,本文选取 Va1∈[1012]和Va2∈[1214]为车辆满载 A80工况下的综合最优取值范围。同理可得其余典型工况下的综合最优取值范围为:Va1∈[1012]和Va2∈[1214]为车辆满载B60工况下的综合最优范围;Va1∈[810]和Va2∈[1214]为车辆满载 C40工况下的综合最优范围;Va1∈[1012]和Va2∈[1012]为车辆空载A80工况下的综合最优范围;Va1∈[810]和Va2∈[810]为车辆空载B60工况下的综合最优范围;Va1∈[68]和Va2∈[1214]为车辆空载C40工况下的综合最优范围。
2.2 模糊控制器设计
由模糊规则的探寻可知:整车控制可以采用4个双输入单输出模糊控制器对前悬架和后悬架分别进行控制。由于整车模型结构左右对称,实际的路面激励相似,因此左右两侧的悬架可以采用同一控制器。控制器的输入为对应悬架处的轮胎动载荷和空气弹簧气压,其中轮胎动载荷用于感知路面等级的变化、气压用于感知车身载荷的变化,输出为附加气室容积值。整车模糊控制器结构如图7所示。

图4 座椅加速度随附加气室容积变化规律
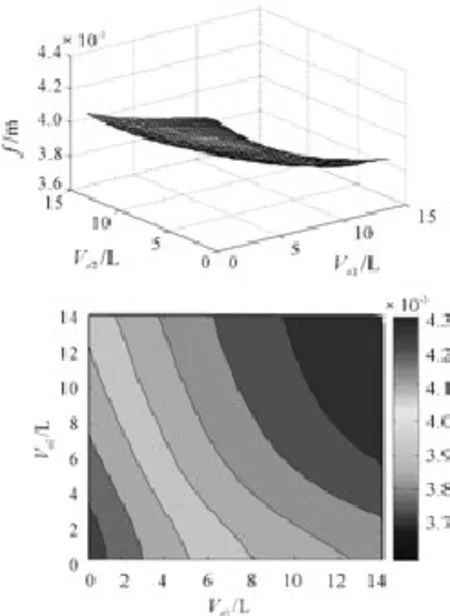
图5 前悬架动行程随附加气室容积变化规律

图6 后悬架动行程随附加气室容积变化规律
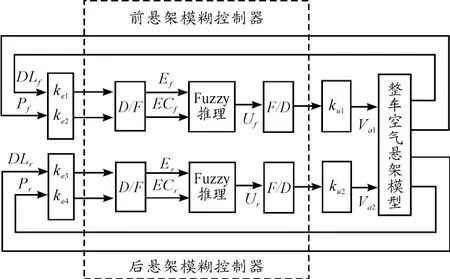
图7 整车模糊控制器结构
图7中Ef和ECf分别为前悬架轮胎动载荷DLf和空气弹簧气压Pf经模糊化模块D/F后得到的输入模糊变量。这2个模糊变量经过模糊推理模块后得到输出模糊变量Uf,最后经过清晰化模块F/D处理后转化为可以驱动执行机构的清晰量Va1;Er和ECr分别为后悬架轮胎动载荷DLr和空气弹簧气压Pr经模糊化模块D/F后得到的输入模糊变量。这2个模糊变量经过模糊推理模块后得到输出模糊变量Ur,最后经过清晰化模块F/D处理后转化为可以驱动执行机构的清晰量Va2。
1)前悬架模糊控制器设计
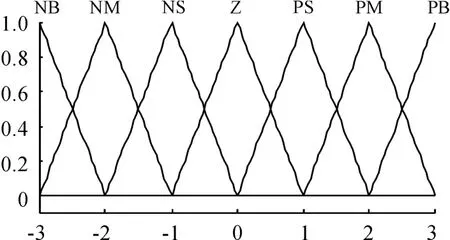
图8 前悬架模糊变量Ef,ECf,Uf的隶属度函数
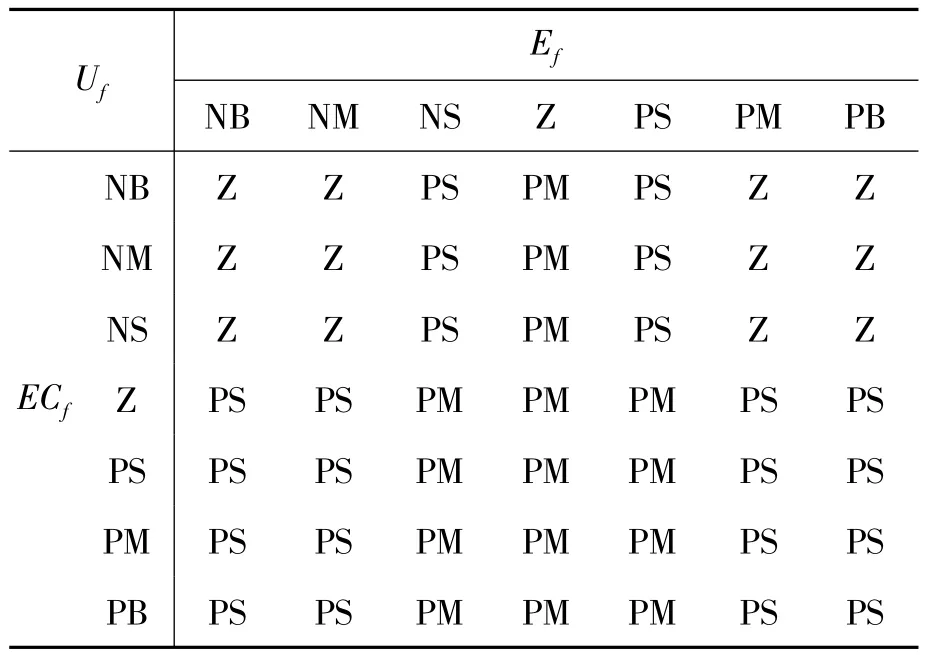
表1 前悬架模糊控制规则
2)后悬架模糊控制器设计
分别以后悬架轮胎动载荷DLr和后悬架空气弹簧气压Pr作为控制器输入,后悬架附加气室容积Va2作为控制器输出,采用图9所示的隶属度函数建立模糊控制规则,如表2所示。
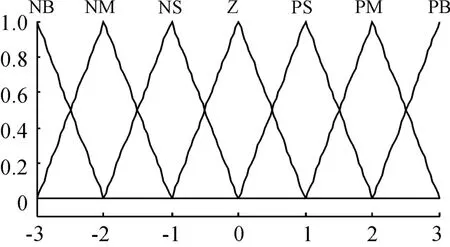
图9 后悬架模糊变量Er,ECr,Ur的隶属度函数
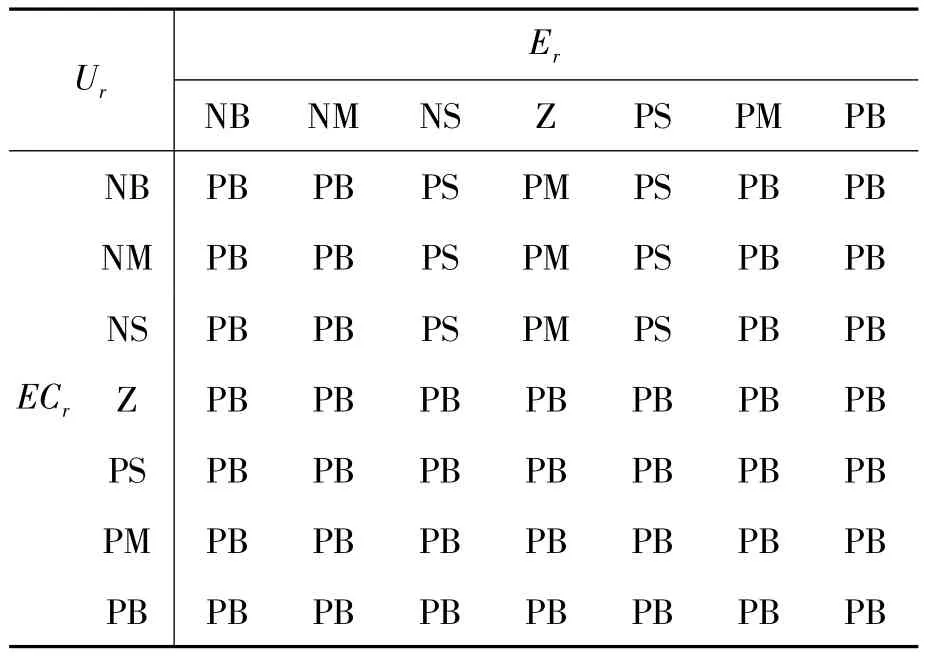
表2 后悬架模糊控制规则
为了兼顾控制精度和计算方便,所有变量均采用 NB、NM、NS、Z、PS、PM、PB 7 个模糊子集来描述;模糊论域均为[-33];清晰化方法采用重心法;模糊推理机采用“Mamdani”型[13-14]。
3 仿真结果对比
将上述建立的前悬架模糊控制规则表分别嵌入前左悬架和前右悬架的模糊控制器,后悬架模糊控制规则表分别嵌入后左悬架和后右悬架的模糊控制器。其中,前左悬架控制仿真模型如图10所示,其余3个悬架处的仿真模型结构与此类似。整车仿真参数如表3所示[15],仿真时间为120 s。
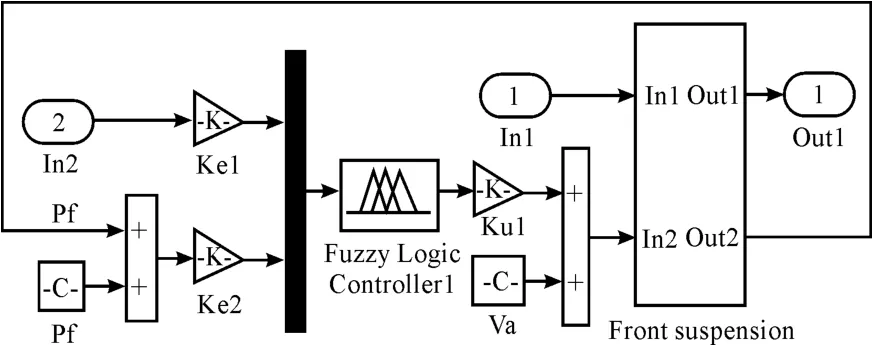
图10 前左悬架模糊控制系统仿真模型
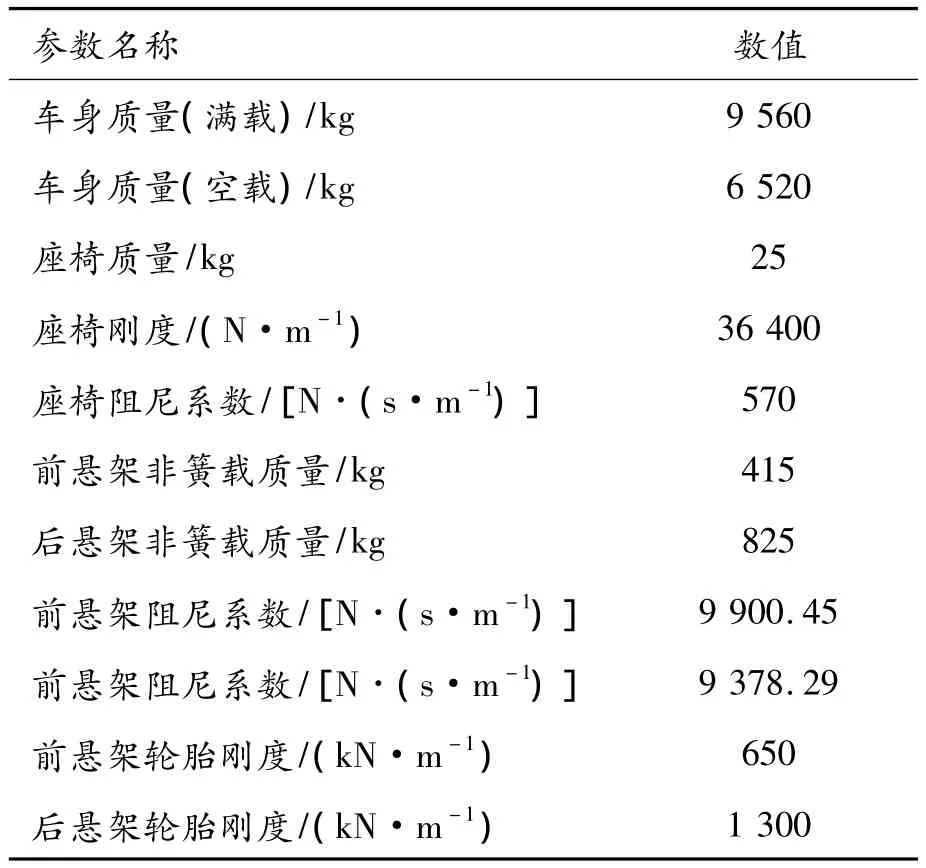
表3 整车仿真参数
以满载A80工况下的座椅加速度、前悬架动行程和后悬架动行程的时域信号为例,利用Matlab中的periodogram函数对该时域信号进行处理,得到图11中各指标的功率谱密度(PSD)以进行频域分析。由图11可知:采用模糊控制的半主动悬架相比被动悬架的座椅加速度在0~5 Hz的低频区域内的振动能量均得到改善,尤其是在1.6 Hz左右的振动能量峰值得到了有效抑制,在5~20 Hz的中高频区域内两者曲线较为吻合;前悬架和后悬架动行程在0.5~1 Hz区域内的振动能量有所恶化,在1~2.5 Hz区域内的振动能量得到改善,其余频域段内曲线较为吻合。对其余工况的仿真可以得到类似结果,在此不再赘述。

图11 功率谱密度对比(满载A级路面80 km/h)
表4和表5为不同工况下各点处控制前后对比结果。由表4和5可知:采用模糊控制的半主动悬架在各点处的平顺性指标均优于被动悬架。其中满载时,模糊控制的半主动悬架较被动悬架的座椅加速度均方根值改善约12%~13%,而空载时改善约5%~7%;满载时前悬架动行程峰值改善约17%~29%,而空载时改善约7%~13%;满载时后悬架动行程峰值改善约19%~22%,而空载时改善约17%~23%。可见满载时对应位置的平顺性指标改善效果明显优于空载时。这说明附加气室容积可调空气悬架对于提升重载车辆的平顺性指标更具潜力。由此验证了模糊控制的半主动悬架提升了车辆在不同工况下的行驶平顺性。

表4 满载时各指标对比
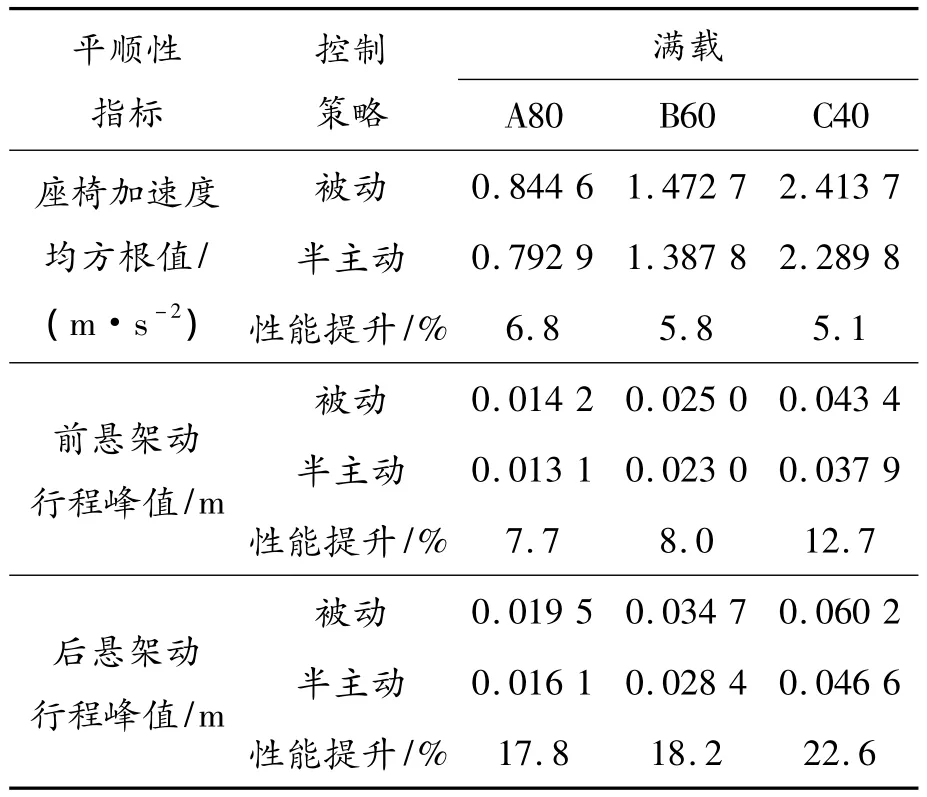
表5 空载时各指标对比
4 结束语
提出基于附加气室容积可调空气弹簧的整车悬架模糊控制算法,采用4个二维模糊控制器来输出前悬架和后悬架所需的附加气室容积值。研究结果表明:在不同载荷和路面等级下,采用模糊控制的悬架平顺性均得到有效提高,且满载相对于空载改善率更为明显,表明采用模糊控制调节附加气室容积对于提升重载车辆行驶平顺性具有重要意义。
[1]杨柳青,陈无畏,高振刚.基于电磁阀减振器的1/4车辆半主动悬架非线性控制[J].农业机械学报,2014(4):1-7,36.
[2]琚龙玉,李仲兴,江洪.附加气室容积可调空气悬架多目标参数匹配[J].汽车技术,2014(6):29-33.
[3]蒋光红.汽车半主动悬架非线性控制方法的研究[D].重庆:重庆大学,2003.
[4]夏奇.汽车磁流变半主动悬架控制方法研究[D].重庆:重庆大学,2012.
[5]李仲兴,李美,郭继伟.带附加气室空气弹簧性能试验系统的搭建与试验研究[J].机械工程学报,2012(4):98-102.
[6]孙丽琴,李仲兴,郭继伟.连接管路对附加气室空气弹簧刚度特性影响的试验研究[J].机械设计与制造,2013(10):51-53,57.
[7]黄定师.基于遗传算法的带附加气室空气悬架参数优化与控制研究[D].镇江:江苏大学,2013.
[8]张衍成.基于Matlab/Simulink的车辆主动悬架模糊控制仿真研究[D].锦州:辽宁工业大学,2014.
[9]高瑞贞,张京军,赵子月.基于改进遗传算法的半主动悬架系统模糊控制优化研究[J].工程力学,2012(1):240-248.
[10]孙世磊,詹长书,陈开来,等.基于模糊次优控制的空气悬架仿真研究[J].重庆理工大学学报:自然科学版,2014(7):21-25,66.
[11]沈维道,童钧耕.工程热力学[M].北京:高等教育出版社,2007.
[12]潘公宇,陈立付,聂秀伟.空气主动悬架模糊控制仿真与实验研究[J].机械设计与制造,2011(1):198-200.
[13]Sebastian Kurczyk,Marek Paweczyk.Fuzzy Control for Semi-Active Vehicle Suspension[J].Journal of Low Frequency Noise,Vibration and Active Control,2014,42:323-328.
[14]Ruey-Jing Lian,Bai-Fu Lin,Wun-Tong Sie.Self-organizing fuzzy control of active suspension systems[J].International Journal of Systems Science,2005,36:363-369.
[15]杨启耀.ECAS客车悬架系统的匹配与充放气研究[D].镇江:江苏大学,2008.
猜你喜欢
汽车实用技术(2022年12期)2022-07-05
汽车实用技术(2021年8期)2021-05-17
汽车零部件(2019年5期)2019-06-13
船海工程(2018年5期)2018-11-01
科技信息·下旬刊(2018年9期)2018-10-21
北京航空航天大学学报(2018年1期)2018-04-20
北京汽车(2016年6期)2017-01-06
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
