人工影响天气“三七”高炮作业数据采集系统
2015-12-02 02:28:54樊昌元张东明李龙飞李代伟
成都信息工程大学学报 2015年3期
张 明, 樊昌元, 张东明, 李龙飞, 李代伟
(成都信息工程大学电子工程学院,四川成都610225)
0 引言
人工影响天气是中国气象部门服务于社会的一项重要科技活动。人工影响天气是为了减轻气象灾害给人类带来的不利影响,充分利用气候资源,在合适的天气条件下通过科技手段人工干预局部大气的物理、化学过程,实现增雨雪、防雹、消雨、消雾、防霜等目的,使局部地区天气状况朝着有利于人类的天气方向转化的一项科学举措。多年来,中国积极利用现代科技手段,开展人影作业,效果明显,在服务农业生产、缓解水资源紧缺、防灾减灾、保护生态以及保障重大活动等方面发挥了重要作用[1-4]。
综合国内外的参考文献、专利及相关资料[5-10],目前人影作业数据采集技术的研究现状中存在很多关键技术缺陷问题,主要体现在以下两方面。
(1)作业方位角的测量问题:人工影响天气作业数据方位角的检测,目前主要采用的是数字陀螺仪,是利用“在进行高速旋转时,相应物体的角动量非常大,旋转轴持续固定指向同一个方向”的原理而制造的定向仪器,但是该仪器须要求被测物体旋转要快,或者说是角动量要足够大,否则将严重影响其稳定性。考虑到人影作业设备的实际旋转速度,且数字陀螺仪价格昂贵,因此陀螺仪不适用于人影作业数据采集系统。
(2)用弹量的检测问题:综合目前的一些研究成果,人影作业用弹量的检测主要是通过语音识别的方法来获取[11-12],炮击声音识别电路采用的是HBR110或RSC-300语音识别芯片,该方法在比较理想的实验室环境条件下准确性能达到90%;但考虑到人影设备作业时震动异常剧烈,且野外环境复杂,所以语音识别的方法不适用于人影作业用弹量的检测。
准确的作业数据直接影响人影作业质量,为确保人影作业的有效性。在该设计中使用三维磁阻式电子罗盘[10]。可以有效解决方位角测量问题,同时采用高精度接近开关可以有效提高炮弹检测精度。可以将作业过程中的方位角、俯仰角以及使用炮弹量等信息上传至人影手持终端,让管理部门及时获取作业一线的实时信息,为作业指挥和作业效益评估提供基础数据。
1 系统功能与总体设计
通过对人影高炮作业数据采集系统进行技术研究,系统能完成人影高炮作业方位角和俯仰角的自动检测;实现炮弹发射时间和数量的自动检测,以及相关数据的储存。同时,系统将获取的相关作业数据经通信模块实时传输到人影手持终端,终端再通过GPRS传输到人影管理部门,让其及时获取作业一线的实时信息,为人影选择作业时机、指挥决策、作业实施及作业效果评估提供了基础和依据,解决多年来指挥、作业、评估相互脱节的技术难题,也为人工影响天气数据和理论分析提供有用可靠的数据。
系统是对气象部门人影作业进行自动化监测的装置,能够实时汇报作业情况,反馈人影作业是否达到预期的精度和要求,还省去了人工上报作业情况的一些麻烦和问题,减少人工引起误差和不准确的情况发生,从而让人影作业更精准有效,同时也为气象人影作业的规范化和科学化管理提供了有力保障。
整个人影高炮作业数据采集装置由ARM芯片作为中央微处理单元,系统通过电子罗盘完成俯仰角角、工具面角和方位角的数据采集,通过实时时钟芯片读取实时时间数据,通过接近开关采集人影作业使用炮弹量。将采集数据存储到存储器并通过蓝牙模块实时向手持终端发送数据。整个装置构架如图1所示。
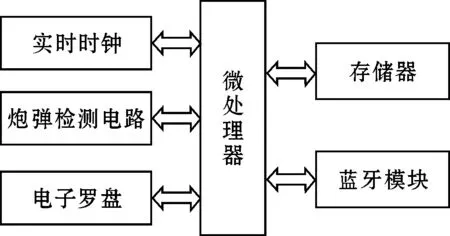
图1 系统结构框图
2 系统的硬件设计
设计主系统选择NXP公司的LPC2000系列处理器,而设计采用LPC2103足以满足设计要求。电子罗盘传感器选用霍尼韦尔公司的HMC6343,该电子罗盘传感器内部集成有三维加速度传感器和三维磁阻传感器,通过I2C总线读取磁场相应值并计算出方位角、工具面角、倾角,精度可以采用安装时现场标定的方法标定[13]。时间数据采集采用PCF8563,是PHILIPS公司推出的一款工业级内含I2C总线接口功能的具有极低功耗的多功能时钟/日历芯片;该时钟芯片提供年、月、日、时和分数据。
在考虑存储器的容量和速度必须满足系统设计的相关要求的基础上,选用Everspin公司的MR25H40非易失性存储器,该存储器选用工业温度范围的磁性随机存储器,容量为4 Mb,采用高速串行SPI接口,读写速度为40 MHz。接近开关选用型号为TCO-3040A的NPN常开型大距离接近开关,检测距离可达到40 mm。人影作业数据采集装置与手持终端通信使用蓝牙模块HC-05。
2.1 HMC6343电子罗盘电路
霍尼韦尔HMC6343型磁阻传感器电路是磁传感器、加速度计、模拟支持电路的三合一测量磁场[14]。另外内装微处理器集成用于方向和校准的硬件计算,其电路图见图2。HMC6343电子罗盘使用I2C协议进行方位角,俯仰角以及工具面角的标定与读取计算。该芯片时钟(SCL0)线和数据 (SDA0)线没有内置式电阻器,并且要求在主装置 (通常用的主微处理器)和HMC6343之间加上拉电阻。数据速率的标准模式为100 kbps速率,电路中使用约10 kΩ的上拉电阻值与标称值3.0 V的供电电压。
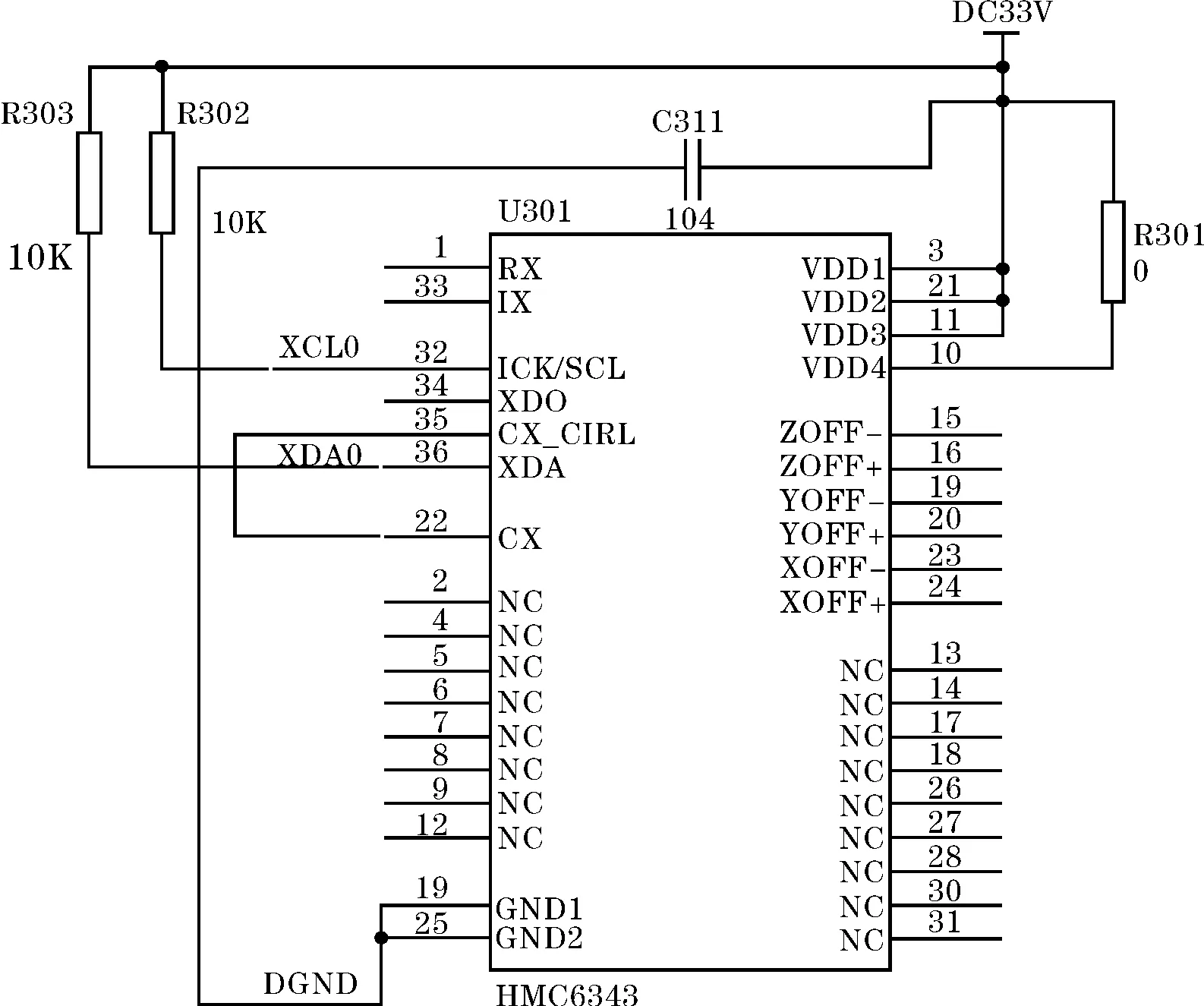
图2 HMC6343电子罗盘电路图
2.1 PCF8563实时时钟电路设计
实时时钟芯片PCF8563电路里加有钮扣电池,以防止系统在掉电时,时间在初始化状态时不是当前时间;由图3 PCF8563实时时钟电路图可知当系统由外部电源供电时二极管D802输出端的电压大于二极管D801输出电压,从而二极管D801截止,此时靠外部电源给实时时钟芯片供电。当系统掉电时二极管D802输出端的电压小于二极管D801输出电压,从而二极管D801导通,此时靠钮扣电池给实时时钟芯片供电。
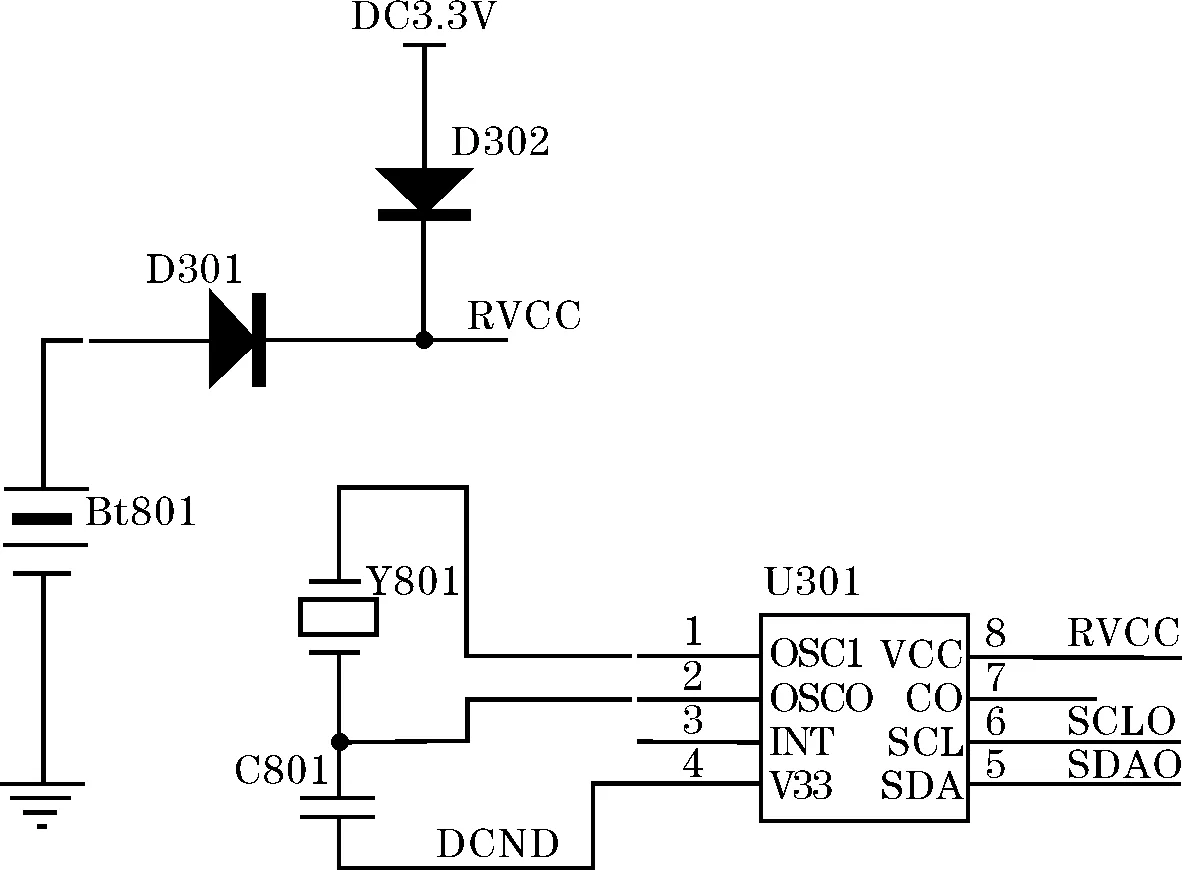
图3 PCF8563实时时钟电路图
2.2 MR25H40存储电路设计
存储器MR25H40为铁电存储器采用的是SPI接口进行读写数据,该存储器具有RAM和ROM优点,读写速度快并可以像非易失性存储器一样使用,因此即使当系统突然断电也可将数据保存。微处理器P0.15和P0.16引脚分别完成控制存储器保持和写功能,SS0引脚完成片选功能。具体存储电路图如图4所示。

图4 MR25H40存储电路图
2.3 炮弹检测电路设计
炮弹检测电路图见图5。当人工影响天气“三七”高炮向目标云发射炮弹后,炮弹壳会从人影高炮的退弹口弹射出。因此在检测人影作业所用的炮弹量时可以将两个TCO-3040A型NPN常开型接近开关固定在高炮退弹口下方,当炮弹壳弹射出经过接近开关上方时即可检测到人影作业过程使用的炮弹量[15-16],两个接近开关检测到的炮弹数量相加就是总的炮弹数。电路图中VDDIN1为12 V的接近开关电压,Dirc-In1和Dirc-In2为两个接近开关信号输入,TLP281-4为光耦将接近开关输入的12 V电压与ARM处理器进行隔离。CD40106B芯片为六反相施密特触发器将SIN1,SIN0信号反相输出,因此炮弹量检测到控制变成脉冲数检测。
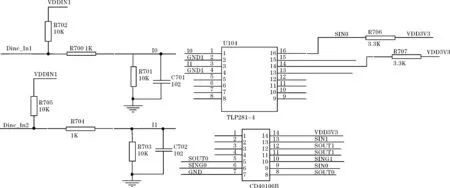
图5 炮弹检测电路图
2.4 蓝牙模块设置
使用蓝牙模块HC-05之前先要使用串口对蓝牙模块进行初始化设置,进入AT命令模式使用AT+NAME命令设置蓝牙名称,使用AT+ROLE命令将蓝牙模块设置成从机模式这样手持终端才能搜索到该蓝牙模块完成通信。这里使用蓝牙模块默认的波特率9600,不需要另行对该参数进行设置。蓝牙模块使用的是TTL电平所以需要在蓝牙模块前段加一块SPS3232芯片将RS232电平转换为TTL电平完成处理器与蓝牙模块的通信[17]。
3 系统软件设计
系统中,在检测俯仰角的软件设计时,传感器的数据输出采用的是应答式输出模式,因此要采集传感器当前的作业俯仰角数据信息,需要LPC2387微处理器发读角度命令,传感器才能回应相应的角度数据。人影作业数据采集装置的软件工作流程图如图6所示,系统上电时对系统进行初始化。实时时钟有纽扣电池供电不需再进行时间初始化设置,蓝牙模块初始化设置包括主从模式设置、蓝牙名称设置、通信波特率设置以及电子罗盘的方位角、俯仰角的校正。初始化后采集器开始采集作业数据当接近开关检测到有弹壳从退弹口弹射出时说明人影高炮已经开始作业系统开始采集到的高炮作业时的方位角、俯仰角、工具面角数据存储,同时采集实时时钟的时间也存储方便进行历史查询。数据存储后等待刷新时间,刷新时间为1分钟(一般作业时间为几十秒,防止炮弹数量还没检测结束就将数据发送到蓝牙模块上传至手持终端)当刷新时间到后将采集到的作业数据传送给蓝牙模块,然后在将作业数据发送到手持终端供管理人员查看作业数据是否有效以及炮弹发射数量。方便管理人员对该次人影作业做出相关评估及管理工作。
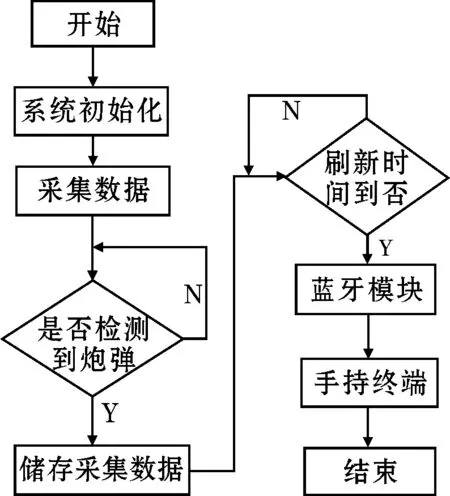
图6 系统软件设计框图
4 系统测试与验证
测试时将人影作业数据采集装置平行固定在模拟测试平台支架正上方,让搭载数据采集器的支架指向正北方向方位角标定为0度,并将支架调整到水平方向上俯仰角标定为0度。此时系统开机后HMC6343在程序初始化过程中调用电子罗盘校准程序,用0X70命令进入校准模式。在进行校准期间,罗盘随着测试平台支架在0~360度方向上(方位角)以及0~90度方向上上转动约1分钟以达到最佳精度。0X7F命令退出校准模式,在退出校准模式时效验后的磁力仪的偏移和比例系数得到了更新。当罗盘校准后回到正北方向并使支架回到水平位置,使用手持终端进行校正归零。炮弹检测通过用金属物体靠近接近开关的方式进行检测,记下用金属物体靠近两个接近开关的次数与作业数据采集器采集到的数据相比较。测试平台数据在测试平台上手动调整方位角、倾角,炮弹量后分别记下当前的数据与作业数据采集器采集到相应的数据进行比较。测试结果见表1。

表1 系统测试结果
从表1的数据可以看出6组数据中炮弹量检测量很准确,当测试平台设置俯仰角和方位角角度较小时误差都在1度以内,较大时作业数据采集器采集到的数据误差有2~3度的误差。由于作业区域为一个扇区,人工降雨炮弹在该区域上空4000到5000米的高空爆炸使得爆炸高温产生的冰晶附着在该区域云层上,该误差在允许范围内。
5 结束语
随着社会的不断发展以后的人影作业智能化、自动化是发展方向。文中介绍一种人影高炮作业数据采集装置的设计方案,使用ARM处理器作为控制核心,霍尼韦尔公司的HMC6343电子罗盘的采集人影高炮作业时的方位角及俯仰角,使用接近开关检测人影高炮作业过程的用弹量。并将作业数据通过蓝牙传至作业点管理人员的手持终端最后将作业数据发送至管理部门,通过数据采集装置可以为人影作业时机选择、方案设计、指挥决策、作业实施、效果评估的基础和依据,也是提高作业的科学性、准确性和时效性的根本保证。
[1] 赵俊平,李亚军.浅淡人工影响天气[J].科学之友,2009,(9):105-106.
[2] 车秀杰.人工影响天气科学技术的发展论述[J].黑龙江科技信息,2012,34:29.
[3] 王春昌,麦北坚,冯涛.人工影响天气工作的现状及对策[J].中国新技术新产品,2011,(14):256.
[4] 郑国光,郭学良.人工影响天气科学技术现状及发展趋势[J].中国工程科学,2012,14(9):20-27.
[5] 蔡衡,高文明.现代技术在人工影响天气中的应用[J].吉林农业,2011,(4):222.
[6] 肖杨利,许德生.一种人工影响天气系统自动化作业平台及其实现方法[P].中国专利:201210207799.2,2012-06-25.
[7] 尤红建,苏林,丁赤飚.一种高精度位置、方位角和俯仰角的组合测量方法及装置[P].中国专利:200710178328.2,2007-11-28.
[8] 陈跃,靳瑞军,刘宗然,等.人工影响天气作业高炮数据实时采集器[P].中国专利:200920307552.1,2009-08-07.
[9] 陈轶,薛蔚,罗永乐,等.火箭、高炮作业控制及安全监控系统和作业监控方法[P].中国专利:201110132819.X,2011-05-20.
[10] 朱科平,金卫平,王利林.火箭、高炮作业参数自动记录仪[P].中国专利:201120189453.5,2011-06-03.
[11] 李东,于如飞,黄华.气象炮射检测系统前端设计[J].通信技术,2009,42(11):203-205.
[12] 李东,郭维波,樊昌元,等.气象炮射检测系统设计[J].微计算机信息,2009,25(23):10-11.
[13] 朱荣华,林新华,孔德义,等.三维磁阻式电子罗盘的研制[J].传感器与微系统,2010,(12):102-104.
[14] 郜莉.三维磁阻式电子罗盘的设计与实现[D].哈尔滨:哈尔滨工程大学,2009.
[15] 梁荣华.浅析接近开关及其在检测中的应用[J].机械研究与应用,2005,(5):106-106.
[16] 邓重一.基于电感式接近开关的安全检测系统[J].中国仪器仪表,2004,(1):6.
[17] 李建高,李树明.基于蓝牙与智能手机的远程信息采集与控制系统[J].微型机与应用.2012,31(17):92-94.
猜你喜欢
青年文学家(2023年28期)2023-11-03 09:25:43
作文·小学中高年级(2021年8期)2021-11-07 12:22:41
作文·小学中高年级(2021年9期)2021-11-07 11:13:52
黑龙江气象(2021年2期)2021-11-05 07:07:06
军事文摘(2020年15期)2020-08-15 08:54:52
军事文摘(2018年24期)2018-12-26 00:58:20
现代兵器(2017年4期)2017-06-02 15:58:14
中国中药杂志(2016年22期)2017-02-13 17:06:29
中国科技博览(2016年25期)2016-12-20 18:33:56
养生大世界(2016年5期)2016-05-19 12:37:02