
基于混合逻辑动态模型的逆变器和电机建模仿真
2015-11-30 07:19:10崔博文
机电工程技术 2015年10期
罗 凯,崔博文
(集美大学,福建厦门 361021)
基于混合逻辑动态模型的逆变器和电机建模仿真
罗 凯,崔博文
(集美大学,福建厦门 361021)
逆变电路是一个由离散的控制信号驱动连续状态变量随时间演化的典型的混杂系统,传统的基于数学模型的建模方法要么只考虑了系统的离散控制变迁忽略了系统的连续状态变迁,要么只考虑系统的连续状态变迁忽略了系统的离散控制变迁,这非常容易造成重要故障信息的丢失,大大影响故障诊断的实时性和可靠性。通过分析逆变器和电机系统的运行模式,建立逆变器和电机的混合逻辑动态模型,并运用MATLAB/SIMULINK对逆变器和电机的故障模式进行仿真分析,仿真结果表明该方法很好地描述了逆变器故障时系统的输出特性,为后续的故障诊断提供准确的故障信息。
逆变电路;混合逻辑动态模型;故障模式;仿真
0 引言
在电机驱动系统中,逆变器根据控制器发出的开关信号调制出一定频率和幅值的电压脉冲序列,是一个典型的非线性环节,这些电压脉冲作用在感性的电机绕组上产生连续的状态电流,因此,逆变器和电机构成了一个由离散事件驱动连续状态演化的混杂系统。而现有的基于逆变器数学模型的建模方法中多采用状态空间平均法,对一个调制周期内的开关模式做时域上的平均处理,无法将瞬态过程揭示出来,例如逆变器传统开关函数模型,只考虑了电路控制变迁,而没有描述与电路连续状态相关的条件变迁,这可能导致重要故障信息的丢失,不能用于功率管故障状态时的分析。而混杂系统(Hybrid System,HS)是指离散事件系统和连续变量系统相互混杂、相互作用而形成的统一动态系统,不仅可以描述电感电流连续时的电路特性,又可以描述电感电流断续时的电路特性。因此使用混杂系统对逆变器和电机系统建模可以获得更为准确的数学模型,更好地实现系统的分析和诊断。
1 逆变器和电机的混杂系统建模及故障分析
1.1 电机驱动系统的运行模式分析
电机及其驱动系统一般由电机本体、功率变换器、转子位置传感器和控制器四部分构成[1]。功率变换器是AC-DC-AC环节,其中的AC-DC是整流环节,DC环节使用了滤波电容以提升直流输出质量,DC-AC环节是逆变环节,电机三相绕组采用星型连接。当系统正常运行时,控制器接收指令和反馈的三相电流信息和电机位置角信息,然后将反聩信息转变成开关信号S1~S6输出,开关信号经过系统的隔离与驱动输入到DC-AC环节中,DC-AC环节能够产生离散电压脉冲信号,这些离散的电压脉冲信号输入到带有电感的电机中产生连续的状态电流。图1是逆变器和电机的等效电路。

图1 逆变器和电机系统等效电路
1.2 逆变器和电机的混杂系统模型
对图1中的逆变器和电机等效电路,根据基尔霍夫定律求得电机的三相绕组电压表达式为:

其中,uan、ubn、ucn为电机绕组和电路假想中点n之间的三相电压(V);
ia、ib、ic为电机三相绕组电流(A);
ea、eb、ec为电机三相反电势(V);
R为电机三相绕组电阻(Ω);
L为电机定子电感(H),L=LS-M,其中 LS为自感,M为互感。
假设T1~T6都为理想开关,并规定电路中电流流入电机三相绕组为正,电流流出为负,用S1=0表示T1断开,S1=1表示T1导通,依次类推S6=0表示T6断开,S6=1表示T6导通。以电路中a相绕组为例,设在a点和g点之间的电压为uag,那么有:

对于采用三相对称星型绕组,有ia+ib+ic=0,又由于电机的三相反电势是处于平衡状态的,即有ea+eb+ec=0,结合式(1)得:

进而求解出电机三相电压方程是:
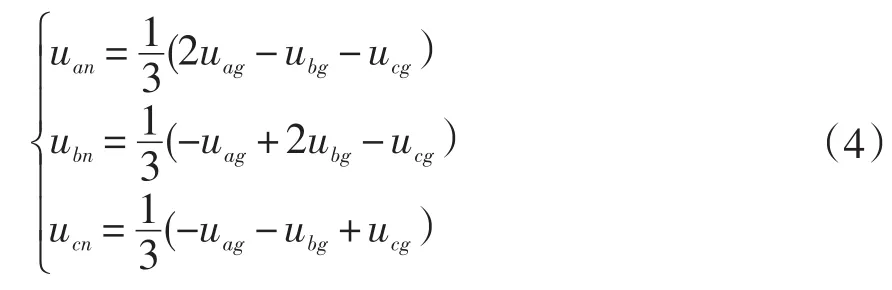
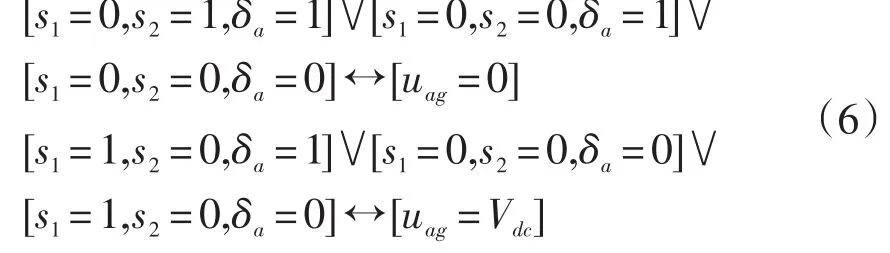
定义辅助逻辑变量δa、δb、δc令:

结合式(4)有下列逻辑关系:
同理可得电机驱动系统电压的混合逻辑动态模型为:
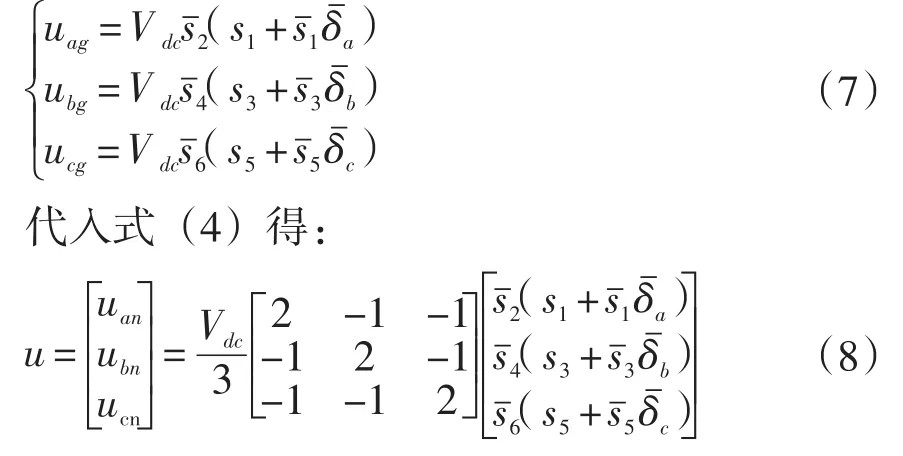
同理代入式(1)可得:

设δ=[δ1δ2δ3]T,令:

可得以电流为状态变量的电机驱动系统混合逻辑动态模型为

用向量表示为

利用式(12)构建电机驱动系统的健康混合逻辑动态模型状态估计器:

用式(12)减去式(13)可得系统状态残差为

1.3 逆变器故障模式分析
逆变器故障主要发生在逆变电路的功率开关元件上,且是电机驱动系统发生故障的主要原因,在电机驱动系统中,逆变电路主电路常见的故障模式[2]有:
(1)任一功率开关元件发生短路故障;
(2)任一功率开关元件发生开路故障;
(3)同一相桥臂两功率开关元件同时发生开路故障。
通常情况下可以采用功率开关元件与熔断器进行串联的方式[3],当功率开关元件发生短路故障时熔断器断开,因此可以将短路故障可以等同于开路故障来研究。
以逆变器a相为例,当T1发生开路故障时有S1=0,则有:

当T2发生故障是有S2=0,则有:

当T1和T2同时发生故障时,则有:
当T1发生故障时,则有:

设故障前残差初始值为零,写出方程组形式有:
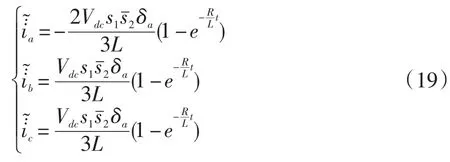
当T2发生故障时有:

当T1和T2同时发生故障时有:
2 仿真和结果分析
在MATLAB/SIMULINK仿真环境下搭建永磁同步电机系统及其MLD模型,其中滤波电感、电阻、电容分别为:100 μH、20 mΩ、0.01 F,母线电压320 V,开关频率10 kHz,给定转速2 400 r/min,负载转矩2 N·m,假设当t=0.1 s时,a相桥臂上管T1开路故障、下管T2开路故障及T1与T2同时开路故障的仿真结果分别如图2~10所示。
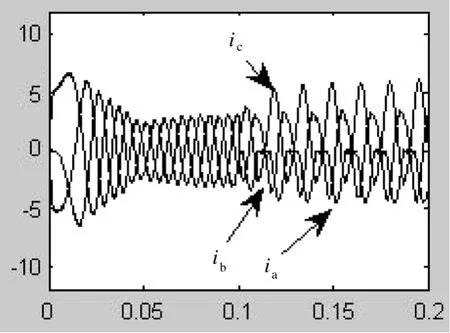
图2 T1在t=0.1 s故障时实际三相电流
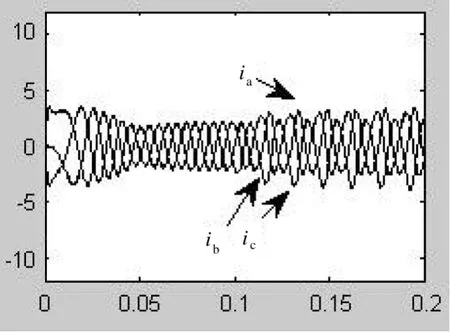
图3 T1在t=0.1 s故障时MLD模型中三相电流

图4 T1在t=0.1 s时三相电流残差

图5 T2在t=0.1 s故障时三相电流

图6 T2在t=0.1 s故障时MLD模型中三相电流

图7 T2在t=0.1 s时三相电流残差

图8 T1和T2同时在t=0.1 s故障时三相电流
从T1在0.1 s发生开路故障时的仿真结果可以看出,当T1反生开路故障时,三相电流残差基本符合这说明MLD模型能准确描述实际系统故障时的状态。
从T2在0.1 s发生开路故障时的仿真结果可以看出,当T2发生开路故障时,三相电流残差基本符合这说明MLD模型能准确描述实际系统故障时的状态。
从T1和T2在0.1 s同时发生开路故障时的仿真结果可以看出,当T1反生故障时,三相电流残差基本符合正负值交替变化。这说明MLD模型能准确描述实际系统故障时的状态。
3 结语
本文在对逆变器和电机工作模式分析的基础上,建立了逆变器和电机的混杂系统模型,利用实际系统与MLD模型状态估计器之间的输出产生残差,建立系统的状态的残差方程,仿真结果表明利用MLD模型建立的电机驱动系统MLD模型能够准确地描述实际系统的状态,利用MLD模型构建的残差方程仿真结果与理论十分接近,对逆变电路的故障检测诊断提供了一种行之有效的建模方法。
Modeling and Simulation for Inverter and Motor Based on Mixed Logical Dynamical Model
LUO Kai,CUI Bo-wen
(Jimei University,Xiamen361021,China)
Inverter circuit is a continuous state variable is driven by a discrete control signal with time evolution of a typical hybrid system,traditional modeling method based on mathematical model only consider the system either ignore discrete control change the state of continuous change of the system,and the ignored either considering only the system state of continuous change of discrete control system change,it is very easy to cause the loss of fault information is important,greatly influence the real-time performance and reliability of fault diagnosis.This paper has established the mixed logic dynamic model of inverter and motor through the analysis of the mode of the inverter and motor system,and using MATLAB/SIMULINK to simulation analysis the fault mode of inverter and motor,the simulation results shows that the method is very good to describe the output characteristics of system when inverter fault,provide accurate fault information for subsequent fault diagnosis.
inverter circuit;mixed logic dynamic model;fault mode;simulation
TM464 TM346
A
1009-9492(2015)10-0066-04
10.3969/j.issn.1009-9492.2015.10.016
2015-04-15
猜你喜欢
防爆电机(2023年6期)2023-11-30 03:05:28
网络安全与数据管理(2022年3期)2022-05-23 13:26:48
新型工业化(2021年8期)2021-10-23 10:27:10
电子与封装(2021年7期)2021-07-29 10:58:48
建材发展导向(2021年7期)2021-07-16 07:07:28
北京航空航天大学学报(2020年10期)2020-11-14 09:26:02
自动化学报(2019年6期)2019-07-23 01:18:32
青年歌声(2019年2期)2019-02-21 01:17:36
知识经济·中国直销(2017年11期)2017-11-28 05:34:13
中国公路(2017年16期)2017-10-14 01:04:46
